礦用電鏟提升電機安裝工藝改進
2018-11-06 08:30:24石勇
中小企業管理與科技 2018年25期
關鍵詞:測量
石勇
(內蒙古大唐國際錫林浩特礦業有限公司,內蒙古 錫林浩特 026000)
1 引言
礦用電鏟鏟斗的提升由兩臺交流電機提供動力,電機通過聯軸器與減速軸一軸連接,完成動力的傳輸,將電能轉化成機械能,進而為電鏟鏟斗提供動力,由于動力的傳輸是以圓周轉動運動的形式傳遞的,故傳動軸轉速高、傳遞力矩大,這就要求提升電機的輸出軸與提升減速機一軸同軸,同軸度偏擺度要求在0.15mm以下,本方法著重介紹如何在傳統工藝的基礎上運用相似三角形原理準確計算出偏差量,縮短安裝時間并且提高安裝的精度。
2 安裝基本原理和方法
2.1 安裝的基本原理
安裝順序為:首先將提升減速機安裝就位,再以提升減速機的輸入軸為基準,以輸出軸與提升減速機一軸的同軸度偏擺(小于0.15mm)為基準,在立體空間內調節提升電機的位置,并將提升電機安裝就位。
2.2 安裝的具體方法
①首先在水平位置(X軸)調節提升電機與減速機兩軸的軸斷面水平間距,使用卡尺測出兩軸斷面的間距,并將該間距與標準數值比較,根據誤差量調整,直至間距達到標準。
②提升電機與提升減速機兩軸的軸斷面間距符合要求后,放置兩塊千分表,如圖1所示,千分表的基座安裝在提升減速機的一軸上,千分表1測量提升電機輸出軸的徑向(Z軸)偏差量,千分表2測量提升電機輸出軸橫向(X軸)數值,在提升電機對輪的3點鐘、6點鐘、9點鐘、12點鐘的位置上取得4組數據,然后分析所得到的偏差量,如偏差量大于0.15mm,需要根據誤差的數值對提升電機的位置用調整墊片增減(銅片0.1mm、0.3mm、0.5mm等)或螺栓頂推方法進行橫向和徑向的調整,調整后重復測量-調整的步驟直至滿足要求為止。
3 在傳統工藝上的改進和創新
安裝提升電機的關鍵點是如何根據誤差量進行提升電機位置的調整。傳統方法根據經驗進行調整,只能判斷調查的方向,不能精確計算出調整量,因此需要多次的反復嘗試,效率極低,且安裝精度無法保證。下面著重介紹如何利用相似三角形原理快速準確計算出提升電機的調整量。
在提升電機安裝反復調整的過程中,經過一段時間的仔細觀察和認真推敲后,發現誤差的數值和提升電機的調整量正好為兩個直角三角形的兩個邊,這就滿足相似三角形的條件,而相似三角形的對應邊是成比例的,也就是說可以根據測量的誤差精確的計算出電機的調整量,

圖1 提升電機與提升減速機一軸位置示意圖
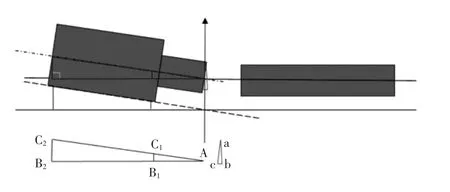
圖2 電機在XZ平面位置示意圖
如表1,在根據千分表2的誤差量計算調整量時運用了相似三角形原理,下面以XZ平面電機的調整為例介紹具體計算過程,如圖2,在圖上電機中軸線與斷面的交點與坐標系中心點O點重合,從圖中可以抽象出以下直角三角形△abc、△AB1C1、△AB2C2,可知B2C2的邊長為電機Z向支撐點的調整量[1]。
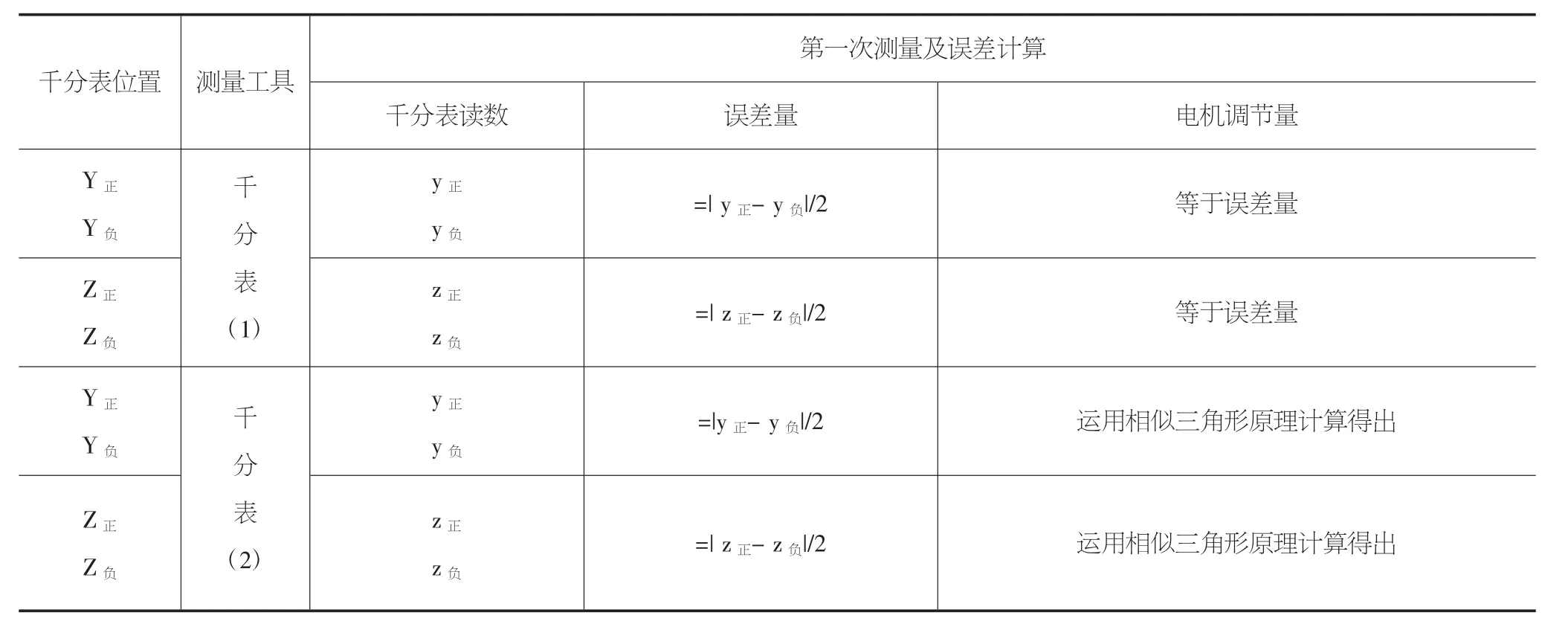
表1 千分表測量數值表
在△abc和△AB1C1中,
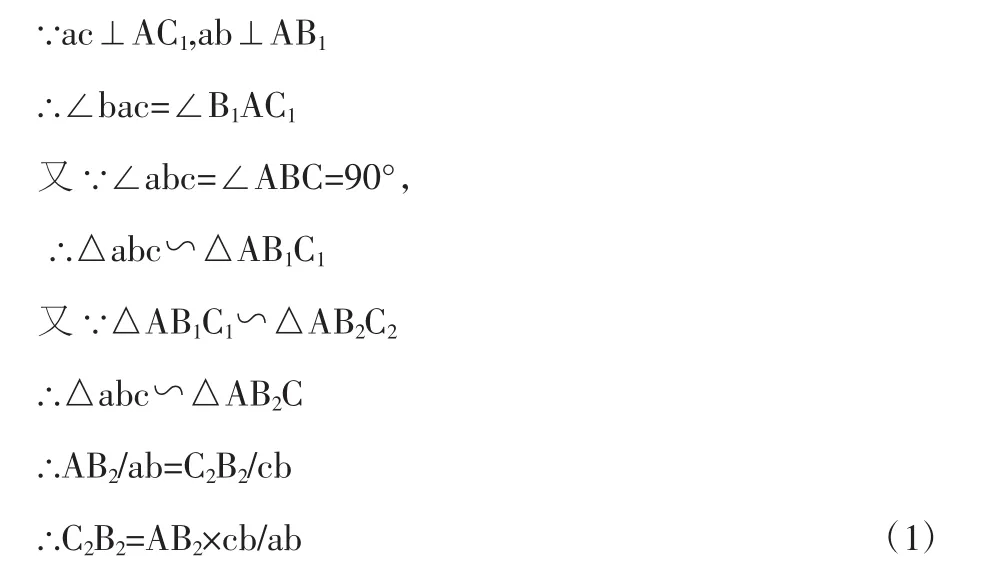
在公式(1)中,AB2、ab的長度可以通過測量工具(如直尺)直接測量得出,在△abc其中點a、點c分別為千分表2與提升電機輸出軸端面在Z軸正負方向的測量點,bc的長度為表一中誤差量的2倍,從而根據公式(1)可計算出電機在點B的調整量,相同原理可得出電機在Y向的調整量。
4 結語
礦用電鏟提升電機的安裝調整對精度要求較高,利用相似三角形方法可以精確計算出調整的偏差量,這就大大縮短了提升電機的調整時間,經過幾次調整就可以滿足安裝要求,而且提高了調整的精度,錫林浩特礦業有限公司4臺WK-20電鏟提升電機精度均在0.03mm,平均用時約為0.4小時。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
