帶負載電流前饋的三相V SR的控制策略
2018-11-07 03:35:10高立東馮麗娜
中小企業管理與科技 2018年22期
關鍵詞:系統
高立東,馮麗娜
(1.泰安供電公司,山東 泰安 271000;2.山東電力設備有限公司,濟南 250000)
1 引言
擁有端口正弦電流,可調功率因數,雙向流動的能量,可調電壓的PWM技術,是能源友好型技術重點發展方向。新能源系統一直研究此項技術,特別是直驅式風力發電、光伏并網發電。PWM整流器是風力發電系統中實現機側BOOST升壓、可調功率因數和最大功率跟蹤控制(MPPT)[1-2]的關鍵技術。功率控制風力發電系統的核心,為達到最大指標功率,捕捉最大風能,利用永磁同步發電機定子磁場定向原理使發電機轉矩跟隨風速變化,實現最優輸出。
在20世紀末期,由于A.W.格林等人提出基于坐標變換的PWM整流器的連續和離散動態數學模型,使PWM整流器提升到嶄新的水平。電壓型PWM整流器主要研究電流控制的控制策略。由于三相電壓型PWM整流器拓撲結構簡單,采用相應的控制系統策略和濾波器就可以得到高品質輸出輸入電流。基于電流電壓雙環控制的三相PWM整流器一般采用間接或者直接電流控制方法。
2 數學模型
三相半橋PWM整流器主電路拓撲結構如下圖。每個橋臂是由兩個帶反并聯二極管的IGBT開關管串聯組成,共有3個橋臂。從圖中可以看出,交流側三相電壓源和三相電流分別是ea、eb、ec、ia、ib、ic;輸入側電感和輸入側等效電阻分別是 L 和 R,三個橋臂的交流輸入測電壓分別為ua、ub和uc,直流側電壓為udc,負載是 RL。
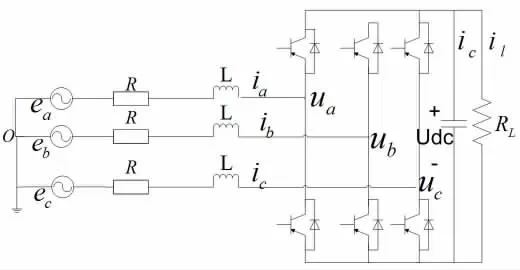
圖1 三相PWM整流器模型
首先定義單極性二值開關邏輯函數:
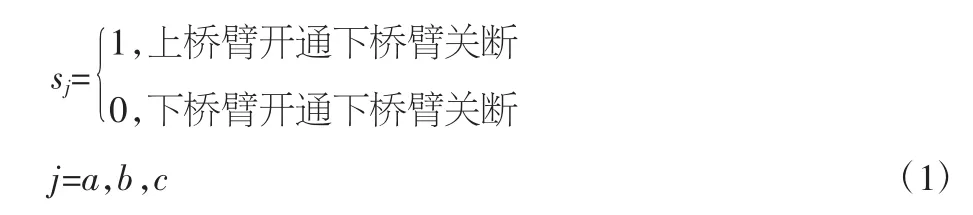
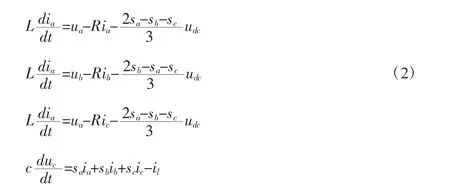
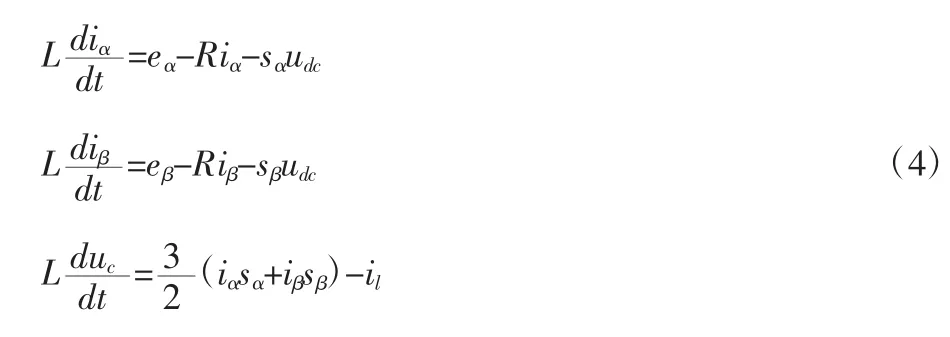
sj=1時uj=udc;Sj=0時uj=0;在三相靜止坐標系下根據基爾霍夫電壓定律建立回路電壓方程:
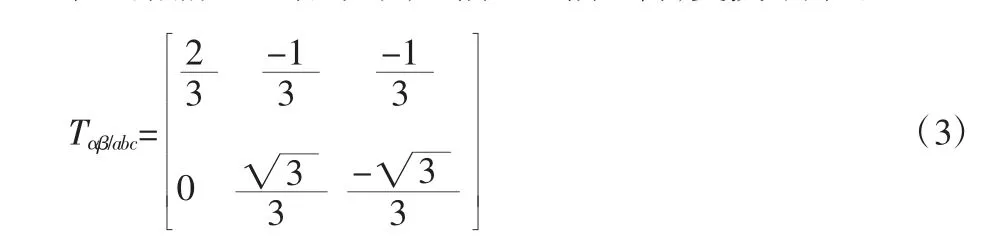
在兩相靜止坐標系下,α軸與a軸重合,變換矩陣為:
建立回路方程:
在兩相同步旋轉坐標系下建立回路方程:
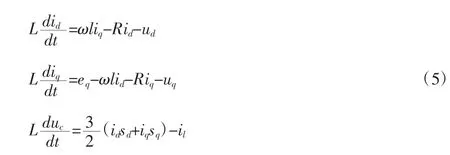
式(5)中電壓矢量定向在q軸則eq=em(電源電壓峰值),ed=0;sd、sq分別為 sa、sb、sc在 d、q 軸的等量變換;ia、ib、ic經過dq軸等量變換后為;ω為電源的角速度。在同步旋轉坐標系中id、iq分別代表無功量和有功量。系統傳遞的有功功率和無功功率分別為(6)(7)所示:

3 控制系統設計
一般的帶SVPWM雙閉環控制策略是由電壓外環和電流內環組成,內、外環的算法和物理意義明確不同;外環負責直流側電壓控制,內環負責相位差控制,保證輸出穩定直流電壓和交流輸入側的功率因數、相位差。由于電感內阻R非常小,可以忽略,控制系統框圖如下所示。
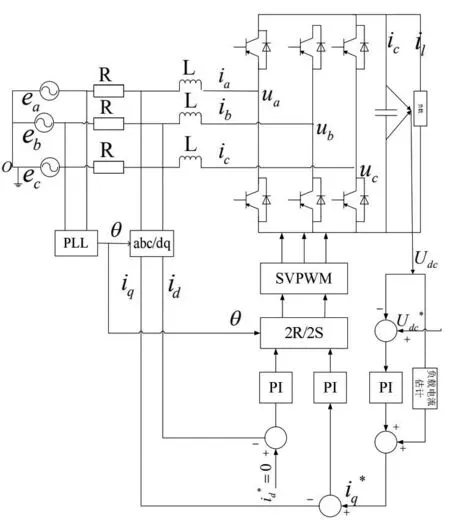
圖2 控制系統框圖
3.1 電流控制器的設計

圖3 電流環解耦控制框圖
從公式(5)可推出電流內環的傳遞函數。如圖3所示,兩個電流內環的前饋解耦算法是對稱的,可取iq為例來分析討論。在比例積分(PI)調節下電流內環iq傳遞函數如圖3所示,Ts為系統采樣周期。
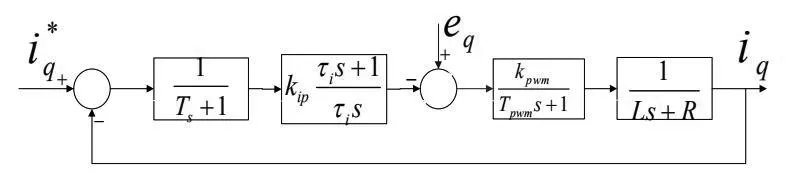
圖4 q軸電流傳遞函數框圖
為提高電流的跟隨性,系統采用型設計,使控制器的零點與被控對象極點相互對消,即

電流環開環傳遞函數為:

當ξ=0.707時系統為典型二階系統,可得:

由于開關頻率應非常高(Ts很小),所以電流內環動態響應速度高,可以把電流內環傳遞函數等效為:

3.2 電壓控制器的設計
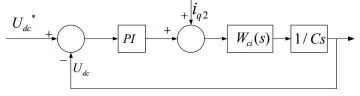
圖5 電壓環控制框圖
理想情況下整流橋的損耗非常小,可以忽略不計,當系統處于穩態運行時,電源輸入的瞬時功率等于直流母線輸出的瞬時功率。

從物理意義上分析,電容電流和負載電流構成了電流iq:

其中iq1、iq2分別代表電容電流和負載電流。負載電流iq2用于前饋控制。
電壓外環使用PI控制器來維持直流電壓的穩定,可得電壓與電流的關系:

三相PWM整流橋輸出的離散且幅值不等的脈沖電流,通過電容器后,濾除雜波和毛刺后,變成負載使用的穩定直流。直流側電壓波形隨著電容器的連續充放電而不斷的波動,t1時刻Udc(t1)到t2時刻的Udc(t2),能量變化量為ΔE。

電壓的變化量ΔUdc為紋波電壓峰峰值,且ΔUdc≤0.05Udc。
輸入電源側的能量變化量:

由式(12)和(13)解得:

由式(14)得:

電壓控制器的積分系數Ki_udc可根據(22)(23)


獲得,(22)和(23)分別為零階保持器和一階保持器。由于紋波電壓的限制條件 ΔUdc≤0.05Udc,時間差(t2-t1)可以選取為三相電源周期的n倍(n<10),這樣可以保證控制系統有效性。
3.3 負載電流il的估計
觀測圖1可知,直流母線電流是電容電流、負載電流矢量和,根據基爾霍夫電流定律可得:


這樣通過利用直流側電壓值和微分觀測器,就可計算得到負載電流。
將式(14)離散化得:
4 仿真結果
利用Simulink中的SimpowerSystems模塊搭建三相VSR仿真模型,仿真使用電網電壓矢量定向和SVPWM調制方式,將電網電壓定向在軸,利用電網電壓瞬時值獲得電網電壓的矢量角,使用直接電流控制技術降低電流諧波含量,建立合適的微分器,估計負載電流。
本文所采用PI設計算法和負載電流的估計方法是正確的,它實現了三相整流器的單位功率因數運行,負載的電流準確估計,有效提高了整流器的抗干擾能力。
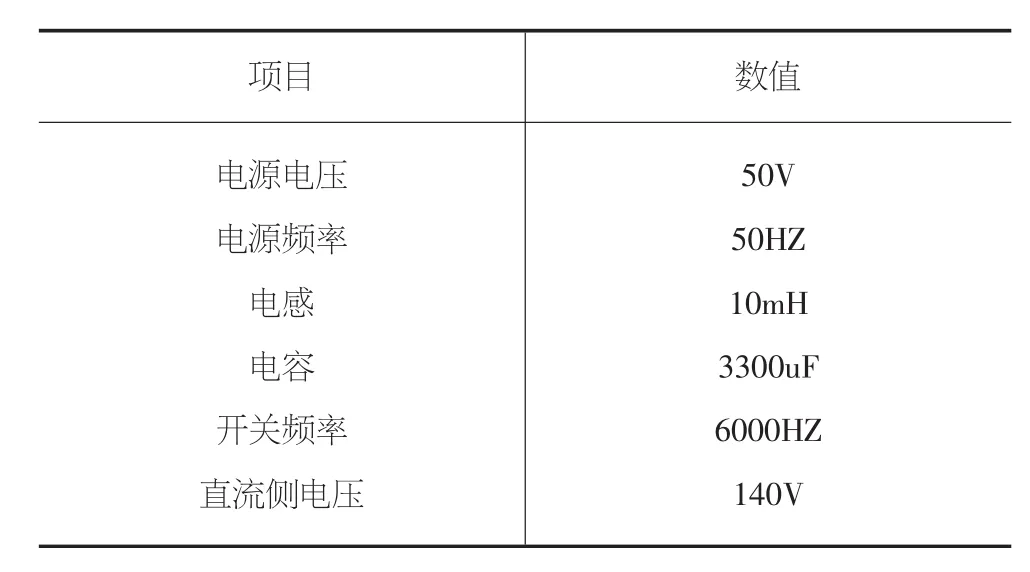
表1 模型具體參數
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32