面向對象的高速動車組牽引制動仿真系統設計
2018-11-09 02:03:08王成武
鐵路計算機應用 2018年10期
王 皓,賈 冰,王成武,陸 陽
(中國鐵道科學研究院集團有限公司 機車車輛研究所,北京 100081)
鐵路客運運輸在我國國民經濟中占有非常重要的地位,其中,高速動車組每年承擔數以億計的鐵路客運任務。為此,我國鐵路發展建設的重要任務之一就是要不斷完善高速鐵路系統的建設、運營組織和管理流程,為我國經濟發展保駕護航。
高速鐵路設計和運營是一個非常復雜的工程,因此設計開發一套高速動車組牽引制動仿真系統是非常重要的。利用計算機能夠非常方便地檢驗各型高速動車組在既有線路上的運行情況,還能檢驗未來新設計的動車組和軌道線路預期能達到的運營效果。
根據研究的側重點和應用需求的不同,動車組仿真系統需要的功能可大致劃分為以下幾個部分:
(1)驗證軌道線路的坡度、曲線、橋隧等分布是否滿足動車組運營需求,并為鐵路建設部門不斷優化軌道線路的縱斷面設計提供參考;
(2)分析動車組車型的技術性能指標和運行能力,為機車車輛設計提供參考;
(3)計算動車組在線路上運行的能耗,為供電系統設計提供參考;
(4)車站間運行時分數據分析,為運輸部門優化運行圖提供參考;
(5)檢驗信號機的布置,為優化信號系統設計提供依據;
(6)為了更好地制定動車組測試方案,也需要先在仿真系統上模擬,選擇出最適合的路段,并對測試計劃進行調整和完善。
從歷史上看,國外已經先于我國開展了高速動車組仿真平臺的研究。例如:北美的RAILSIM、歐洲的Trainstar、日本的UTRAS[1]、俄羅斯的EMUTTCS[2]。它們各有特色,但由于他們的高速動車組運營里程太短,動車組數量不多,所以他們的仿真系統,并不能滿足中國的高速動車組運營里程長,動車組數量眾多的現狀需求。因此有必要結合我國的實際情況,開發具有中國特色的、結合實際應用需求的高速動車組仿真平臺[3]。
中國鐵道科學研究院集團有限公司機車車輛研究所基于中國國情開發了高速動車組牽引制動仿真系統,本文介紹該仿真系統主要設計和結構。該系統使用動車組的動力學模型來推算動車組的運動狀態,提供了方便直觀的動車組控制系統,還繪制了軌道線路縱斷面的細節[5-6]。防止動車組超過軌道限速的功能也包含在系統自動駕駛功能之內[7]。
在自動駕駛部分,我們沒有用簡單的固定加減速控制動車組在區間內運行[8],或通過ATP來控制減速操作[9],而是模擬了不同司機的駕駛習慣來控制動車組的加減速操作。
1 高速動車組仿真系統需求
1.1 軌道數據輸入
仿真系統必須能夠方便地讀取軌道數據文件,這部分數據通常由鐵路設計部門提供。
軌道數據描述整條軌道線路狀況。除了基本的長度、坡度、曲線、橋梁、隧道之外,還要記錄車站、信號機、分相等的公里標位置。讀入數據后,仿真系統還要提供相關設置功能,例如:設定每個車站是停站還是通過,能夠單獨指定線路上的各個分相區間是否有效。對于軌道上車輛位置定位,能夠考慮長短鏈分布,能精準地找到動車組所在處的公里標。
1.2 動車組數據編輯
仿真系統要能記錄動車組的相關參數,這部分數據通常由生產廠家和車型試驗報告提供。
其中,用于描述動車組靜態特性的參數,除了車型、生產廠家、最高速度、車長、車重、額定載員人數之外,還包括輔機功率、編組車輛數及編組形式(幾個動車和幾個拖車)、回轉質量系數(區分動車及拖車)、啟動阻力、最大牽引級位、最大制動級位、是否具備無極常用制動、是否具有定速功能等。
為了描述動車組動態運行的特性,還要記錄牽引特性、電制動特性、運行阻力、制動減速度等。由于動車組可以利用自發電來進行制動減速,因此還要有自發電相關的參數:發電開始速度、發電停止速度、充電機功率、輔助系統功率、逆變器/牽引電機/齒輪箱的效率等。
1.3 實時繪制功能
在模擬動車組運行的時候,仿真系統要能夠把動車組所在位置的軌道情況繪制出來,還要提供動車組的控制手柄狀態,以及運行狀態參數。既能夠讓用戶直接操控動車組的控制手柄進行控車,又能夠根據預先定義的規則,模擬司機自動駕駛動車組運行。因此,我們需要一套模擬動車組操作的界面,以及自動駕駛動車組的規則參數。用戶可以通過修改規則參數來實現不同的控車策略。
1.4 數據記錄和分析
能夠重現和對比不同車型編組在不同軌道線路上的運行過程。通過調整動車組編組情況、軌道線路情況、自動駕駛參數等,可以重現和微調動車組的操作細節。既可以模擬單編組,也可以模擬重聯編組;既可以模擬動車組從線路起點運行到線路的終點,也可以通過公里標來模擬動車組在線路的一段區間內運行的情況。模擬動車組的運行時,既可以人工操控和自動模擬相互切換,也可以使用“自動駕駛”快速完成動車組在整個線路上的運行仿真。
整個仿真過程產生的數據,可以展示在公里標–速度曲線圖上,供在線區間統計結果,也能夠直接導出到csv文件,供后續復雜分析。
2 面向對象的仿真軟件結構與設計
為了滿足以上功能要求,并實現完整的動車組運行過程的仿真,仿真系統需要提供動車組、軌道、模擬司機、仿真項目配置等用戶交互界面。用C#編程語言和Visual Studio 2015進行仿真軟件的編寫和調試。
在仿真系統軟件的設計中,我們將軟件的功能劃分為4個一級模塊和13個二級模塊,每個模塊都提供了用戶交互界面,如圖 1所示。
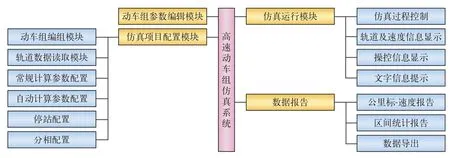
圖1 高速動車組仿真軟件系統界面功能結構設計圖
除了以上模塊外,還設計了若干對象來實現數據管理和仿真流程管理,既能對應用戶界面的數據編輯與查詢驗證功能,又在仿真運行的過程中提供所需運行參數、記錄仿真數據并提供后續統計分析。
2.1 仿真項目對象
仿真項目對象負責組織仿真的開始和結束條件,以及仿真過程中需要的相關參數。這個對象包含的內容,如圖 2所示。
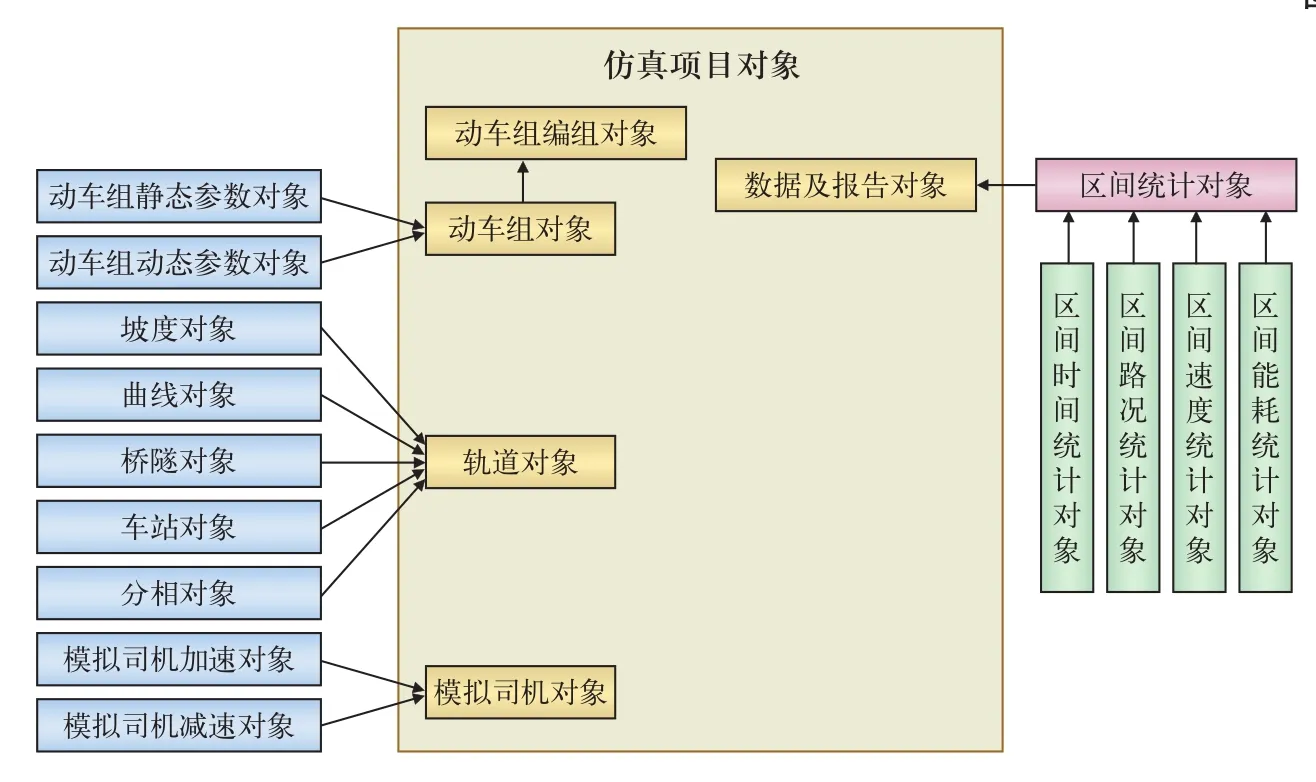
圖2 仿真系統中設計的對象及其關系圖
在一個仿真項目中,可以記錄多次仿真數據,每次都可以配置不同的動車組編組、軌道、模擬司機等參數。在每次仿真之前,都可以對配置中的參數進行修改。例如:設置仿真高速動車組從軌道線路的指定位置開始,運行到指定的位置結束,配置界面,如圖 3所示。仿真項目對象負責記錄這些配置參數,當讀入以前的仿真數據時,用戶可以查看以前的配置參數。
為了方便地記錄和編輯仿真過程中使用到的動車組編組、軌道、自動駕駛模擬的司機,同時還要記錄仿真過程生成的數據,并生成若干報告,在仿真項目對象中包含了5個對象,對應了各自界面的數據編輯功能,同時分門別類地為仿真過程提供重要數據。
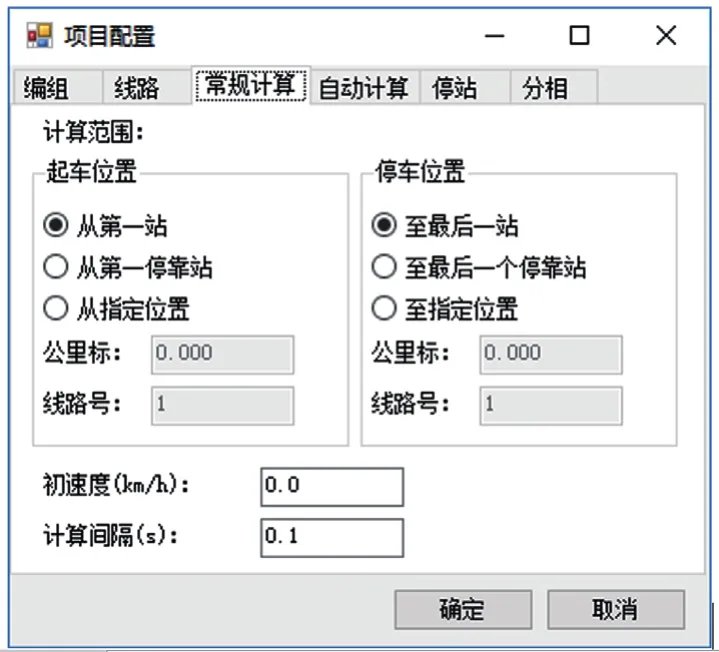
圖3 仿真項目配置中常規計算和自動估算的配置模塊
2.2 動車組編組對象和動車組對象
動車組編組對象,負責仿真過程中使用的動車組編組的組織管理。一個仿真項目中可以配置多個動車組編組實例,每個動車組編組包括一個或多個型號的動車組(即動車組重聯運行的情況)。在仿真過程中,選定一個動車組編組在一條軌道線路上運行。動車組編組管理界面,如圖 4所示。
動車組對象負責維護各型號動車組的參數,仿真軟件可以管理多個動車組實例,在動車組模型管理界面編輯有關車型參數。動車組對象有兩個子對象。(1)靜態參數對象,主要是動車組基本靜態參數的編輯,如圖 5所示。(2)動車組動態參數對象,主要是記錄動車組運行時隨著動車組速度變化而變化的參數,這些參數用曲線公式記錄,并提供繪圖檢驗和查詢功能,如圖 6所示。曲線都是通過公式編輯器輸入的,例如:電制動力由多段公式組成,如圖 7所示。于是,仿真軟件能夠根據動車組的實時速度獲得曲線給出的各種力的準確數值,精度超過拉格朗日插值法[3]。

圖4 仿真項目中配置多個動車組編組管理界面
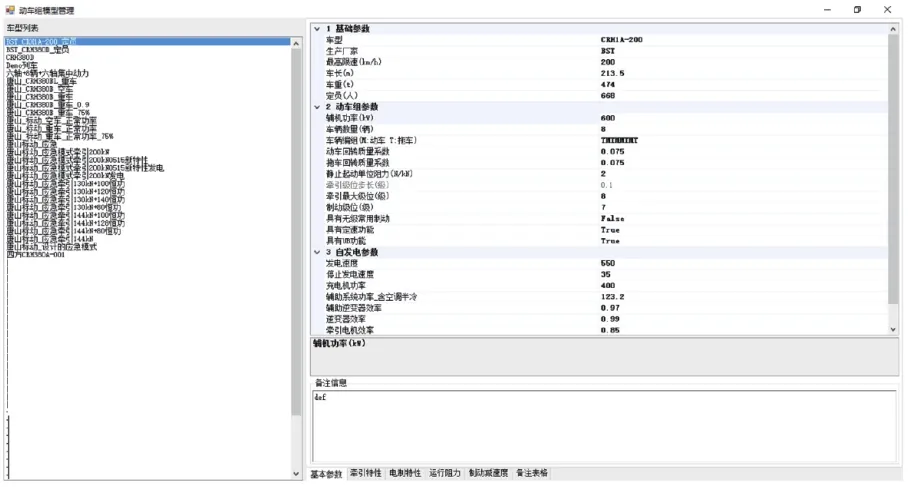
圖5 動車組對象的靜態參數數值管理
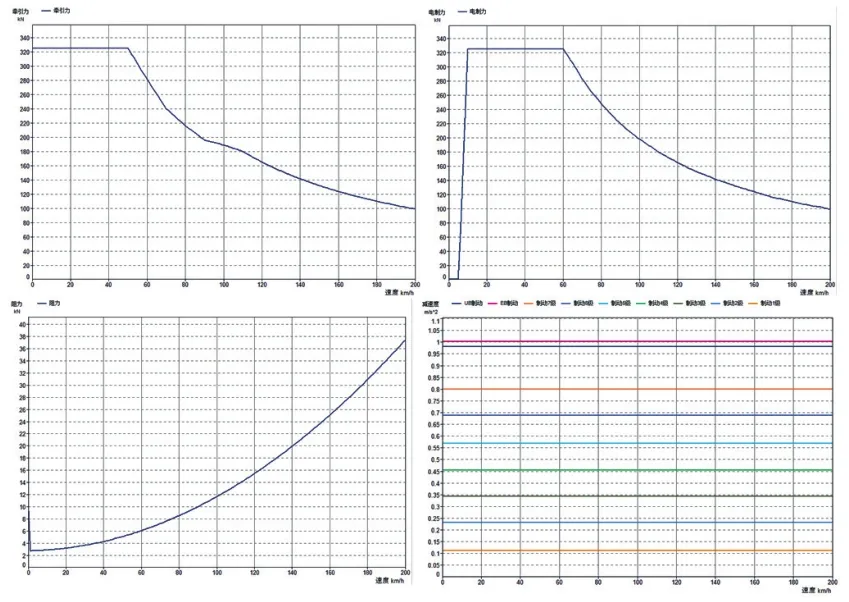
圖6 牽引力、電制力、阻力、各級制動減速度的曲線
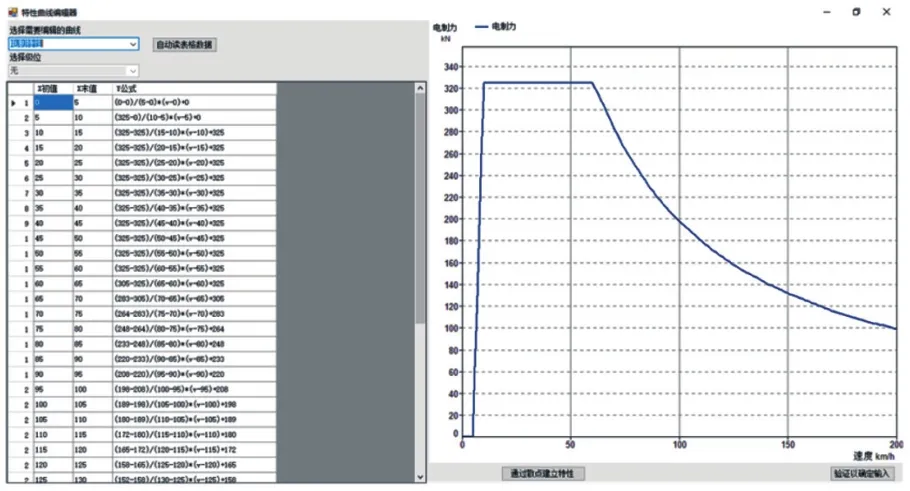
圖7 電制動力曲線的公式編輯器
2.3 軌道對象
軌道對象負責讀取軌道線路數據,還要提供仿真過程中關于軌道參數的查詢。在一個仿真項目中,可以添加多個軌道對象的實例,并選擇其中一個作為當前仿真所使用的軌道線路,其對應用戶界面,如圖 8所示,當前選定的線路會在預覽窗體中看到。
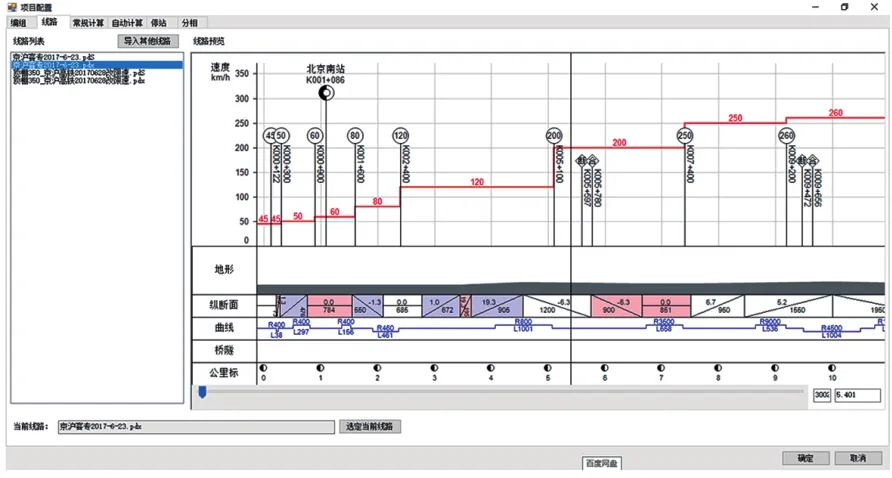
圖8 仿真項目配置中選擇軌道線路
為了提供軌道數據的管理和查詢,軌道對象中包含了:坡度對象、曲線對象、橋隧對象、車站對象、分相對象,如圖 9所示,分別對應管理軌道對象需要維護的數據。
每次仿真,可以設置軌道線路上的不同車站是停站還是通過,還可以配置線路上的每個分相區間是否起作用(不短接的分相,都會讓動車組進入無電惰行狀態),如圖 9所示。
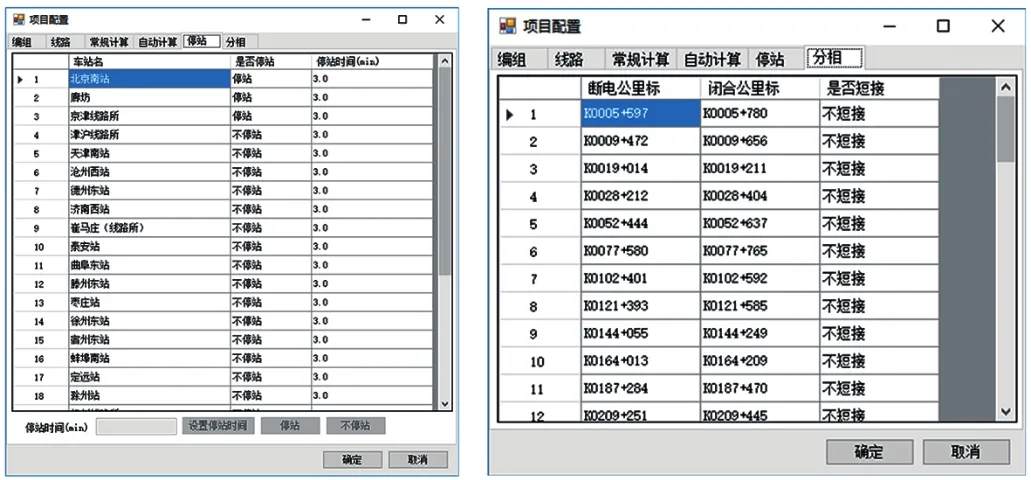
圖9 仿真項目配置中停站配置和分相配置
2.4 模擬司機對象
仿真軟件中專門設計了模擬司機駕駛動車組的對象。當使用自動駕駛功能的時候,模擬司機對象,將根據車速和運行目標,模擬司機操作動車組控制手柄。模擬司機對象的操作特性數據編輯界面,如圖 10所示。
2.5 數據及報告對象
我國原鐵道部制訂了鐵道行業標準《列車牽引計算規程》[10](簡稱:規程)。《規程》中規定的相關計算公式,可以用于動車組運行狀態的計算,用計算機模擬動車組在整條軌道線路上的行駛過程可以極大地提高效率[3]。
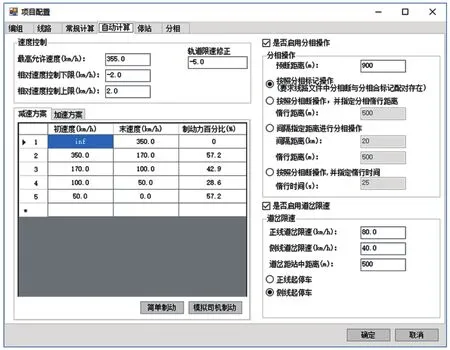
圖10 仿真配置中模擬司機對象的控制特性編輯界面
根據《規程》的規定,動車組在運行過程中的加速度,如式(1)。

其中,F為司機操作手柄產生的牽引力或制動力;f為阻力,來自經驗公式f=a+bV+cV2,a、b、c為通過試驗獲得的經驗常數;ω為軌道阻力,是動車組在公里標對應位置的坡道阻力、曲線阻力、隧道阻力等產生的阻力合力;M為動車組質量;γ為動車組回轉質量系數。
為了記錄動車組在仿真運行過程中的運行狀態,我們設計了數據及報告對象,負責以固定時間間隔t對動車組的運行狀態進行采樣,并生成初步報告。每個狀態點記錄的數據有動車組的公里標、車速、加速度、控制手柄的擋位(牽引/惰行/常規制動/EB/UB)等。仿真運行過程中,系統會按照圖 11左下區的控制參數,根據動車組牽引/制動特性曲線產生牽引/制動力,根據動車組的速度計算空氣阻力,根據動車組位置,從軌道線路查詢數據來計算線路的阻力。最后,按照設定的時間間隔t通過如下遞推公式得到下一個狀態的公里標和速度,如式(2)。

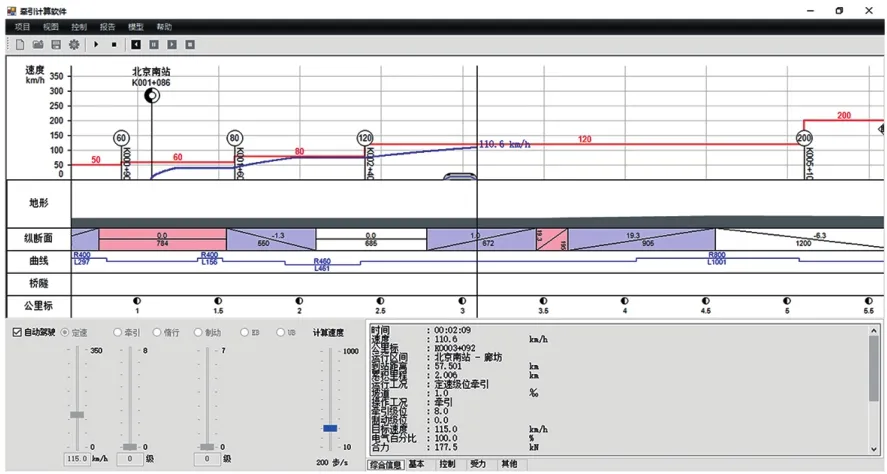
圖11 仿真運行的同時記錄描述仿真過程的數據
仿真過程的每一次狀態推導流程,如圖 12所示。其中,推算動車組下一狀態使用的就是上面的遞推公式。模擬司機操作動車組控制手柄的簡要控制邏輯,如圖 13所示,通過判斷當前的動車組運行狀態,決定當前的操作模式是牽引、制動、惰行和定速之一,按照對應的模式設置手柄狀態。
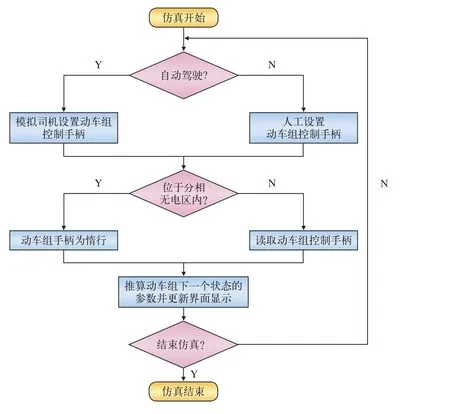
圖12 仿真過程使用的狀態推導流程圖
推算出動車組下一個狀態的參數后,仿真界面自動更新顯示。不斷循環這個過程,直到仿真結束或用戶停止仿真。如果仿真過程中間出現操控不當的情況,可以暫停并回退到之前的位置,人工調節控制手柄的位置,然后再按照新的控制指令進行仿真。
每次仿真都會產生一組仿真數據,記錄在仿真項目中,用戶可以讀取、查看。
在完成一次仿真過程之后,仿真軟件會把所有的數據點存盤。區間統計對象可以利用這些數據,生成各種統計報告。

圖13 模擬司機自動駕駛時產生手柄狀態的簡要流程
3 結束語
我們使用京滬線路和標準動車組的數據在仿真平臺上進行了測試。圖14給出了北京南站到廊坊站的仿真運行結果,基于仿真過程產生的數據,可以得到這個區間的統計報表,如圖15所示。
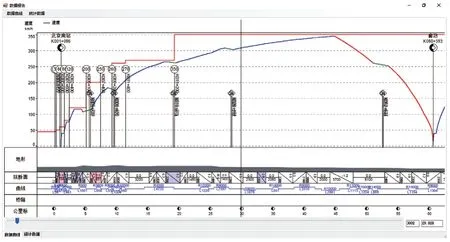
圖14 數據報告的公里標-速度圖

圖15 數據報告的區間分析表格
該仿真結果與實際運行結果吻合,證明了本仿真系統能夠真實的模擬動車組在現有軌道線路上的運行情況, 能夠為動車組實驗提供有效的參考依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
金秋(2017年4期)2017-06-07 08:22:16
中國材料進展(2016年10期)2016-12-26 06:50:20
