新型無刷電勵磁電機操動機構設計與試驗研究
2018-11-09 03:18:54劉愛民
大電機技術 2018年5期
劉愛民,李 博,于 浩,袁 野
?
新型無刷電勵磁電機操動機構設計與試驗研究
劉愛民,李 博,于 浩,袁 野
(沈陽工業大學電氣工程學院,沈陽 110870)
為了簡化電機操動機構的結構并提高其工作可靠性,本文以40.5kV真空斷路器為研究對象,依據其動態機械特性設計一種新型無刷電勵磁電機操動機構。對40.5kV真空斷路器進行負載特性分析,并利用斷路器負載反力曲線對所提出新結構電機進行了三維有限元分析。在此基礎上搭建了操動機構控制系統硬件平臺,制作40.5kV真空斷路器樣機以及新型無刷電勵磁電機樣機,并對其進行聯機合閘試驗操作。仿真與試驗結果均滿足40.5kV高壓真空斷路器的合閘技術要求。驗證了新型無刷電勵磁電機操動機構的可行性。
無刷電勵磁電機;40.5kV真空斷路器;新結構電機操動機構;三維有限元;控制系統;聯機試驗
0 前言
高壓斷路器作為電力系統的重要開關設備,具備控制和保護雙重功能。其中操動機構作為斷路器的主要運動部件,直接影響斷路器工作的可靠性和穩定性。傳統的操動機構主要有電磁操動機構、氣動操動機構、彈簧操動機構、液壓操動機構等[1-4]。由于傳統操動機構零部件比較多,結構比較復雜,所以其工作的可靠性不高。電機操動機構是一種新型的操動機構,相比較傳統操動機構,電機操動機構不僅機構簡單,穩定性好,且運動速度可控,這大大提高了電機操動機構的穩定性[5-7]。
本文針對40.5kV真空斷路器,設計了一種新型無刷電勵磁電機操動機構。完成了如下研究工作:對操動機構進行了運動和負載特性分析,在此基礎上通過有限元對新型無刷電勵磁電機本體模型進行仿真分析,并對新結構電機的中央電勵磁線圈通電時對合閘操作的影響作了仿真分析與敘述。依據40.5kV真空斷路器的特性搭建了操動機構硬件控制系統平臺,最后,對新型無刷電勵磁電機和斷路器進行聯機試驗。
1 電機操動機構簡述
1.1 電機操動機構基本結構
本文以40.5kV高壓真空斷路器為研究對象,并根據斷路器的操動技術指標設計新型無刷電勵磁直流電機操動機構。高壓斷路器主要機械技術參數見表1。

表1 40.5kV高壓真空斷路器的主要機械技術參數
40.5kV高壓真空斷路器操動機構結構如圖1所示,斷路器操動機構主要由驅動電機、控制器和傳動機構三個部分組成。拐臂、拉桿等結構由電機帶動,從而驅動斷路器動觸頭上下運動,利用此種傳動機構可將斷路器動觸頭的直線運動類比為電機旋轉運動,完成斷路器的分合閘操作。

圖1 40.5kV高斷壓路器電機操動機構結構簡圖
1.2 電機操動機構運行原理及分析
在電機操動斷路器分合閘操作過程中,以合閘過程為例,合閘能量主要由電機提供,需要克服操動機構的重力、觸頭反力和彈簧反力。其合閘過程由動觸頭運動的開距階段和壓縮彈簧的超距兩個階段。在圖2中,O點為轉軸,OA為拐臂,AC為拉桿,CBD為三角拐臂,電機旋轉由轉軸帶動拐臂、拉桿運動,再通過拉桿帶動三角拐臂轉動,進而使動觸頭上下運動。

圖2 40.5kV高壓斷路器傳動機構運動圖

圖3為動觸頭行程與電機轉角的關系,OA為開距階段,行程為25mm,A點為剛合點,AB為超距階段,此時動觸頭碰到靜觸頭,所以位移不變,系統需要壓縮彈簧運動。在合閘過程結束時,彈簧會被壓縮一定距離,為觸頭提供預緊力,它可以作為分閘時的一部分能量。斷路器的分閘過程與此過程相反。
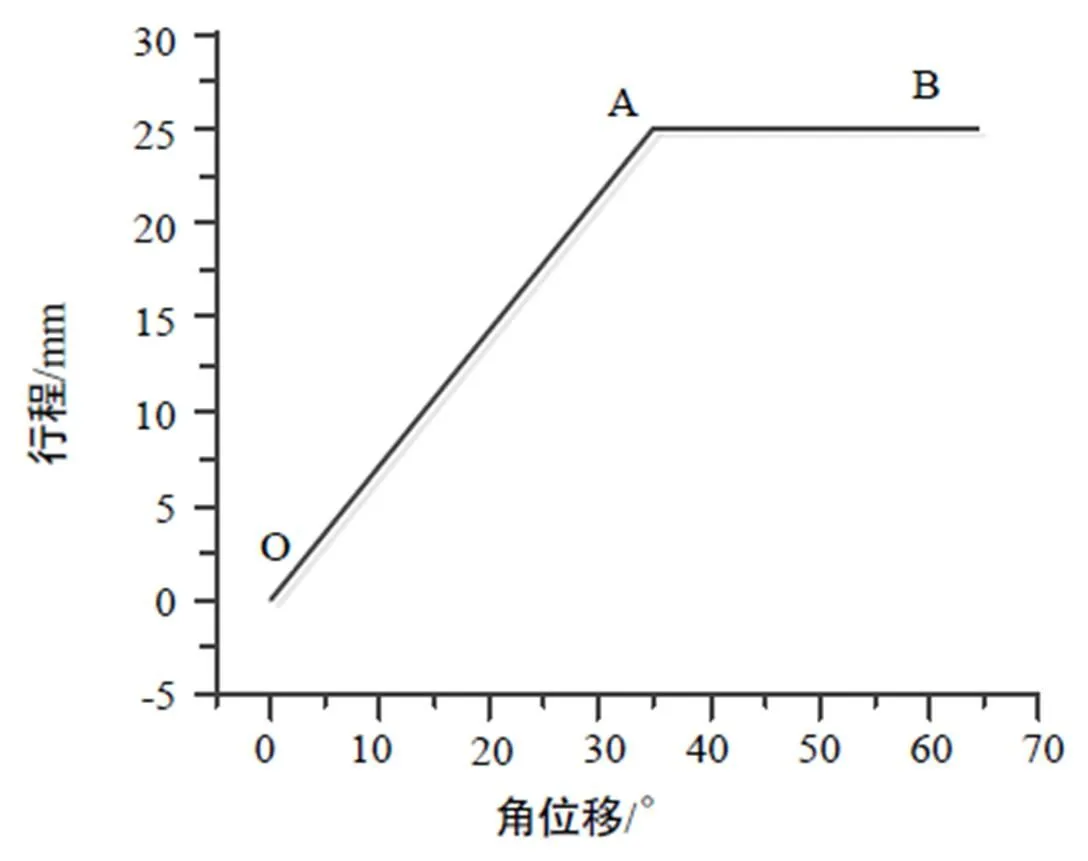
圖3 動觸頭行程與電機轉角的關系曲線
1.3 電機操動機構負載特性研究
高壓真空斷路器的驅動電機必須滿足斷路器負載特性以符合分合閘的要求,操動機構的負載特性主要為負載反力特性。負載反力包括系統重力、彈簧彈力、自閉力以及摩擦力,為了更好的研究負載特性,本文不計摩擦力的影響。40.5kV高壓真空斷路器動觸頭行程為25mm,超距階段為10mm。觸頭彈簧初始壓力為2000N,超距階段結束觸頭彈簧壓力為3000N,觸頭自閉力為200N。
通過疊加原理對斷路器負載進行等效歸算,可得到折算到電機主軸側斷路器的等效負載轉矩曲線如圖4所示。在合閘過程中,電機轉角在0°~36°時,負載轉矩較小,此時為開距階段,驅動電機只需要克服觸頭自閉力和系統重力的作用。在電機轉角為36°時,此時進入超距階段,動靜觸頭接觸,彈簧彈力作用到電機主軸上,負載轉矩突然增大,最大值達到311N?m,這為驅動電機峰值轉矩的設計提供了依據。

圖4 等效負載曲線
2 新型無刷電勵磁電機仿真分析
2.1 新型無刷電勵磁電機的優勢
新型無刷電勵磁電機作為電機操動機構的核心,直接影響操動機構的運動特性,所以驅動電機需要滿足機械響應時間短、啟動轉矩大、轉矩脈動小、系統穩定性好等要求。新型無刷電勵磁電機是一種9/6式雙凸極電機,采用雙套定轉子結構,其結構主要由定子、轉子、轉軸、機殼和繞組五部分組成,其中繞組又分為纏繞在定子上的勵磁繞組和固定于轉軸的中央電勵磁線圈。新型無刷電勵磁電機三維結構如圖5所示。

圖5 新型無刷電勵磁電機三維結構圖
此外,電機運行主要由勵磁繞組通電產生使電機旋轉的電磁轉矩,對中央電勵磁線圈通入不同電流時,會調節定子氣隙的磁通,從而影響電磁轉矩,增大電機的轉矩調節范圍,從而也擴大電機的調速范圍。
2.2 新型無刷電勵磁電機仿真分析
本文依據斷路器負載特性曲線,利用三維有限元仿真軟件ANSYS對斷路器分合閘操作進行動態仿真分析。圖6給出了電機操動機構實現分合閘操作時,驅動電機的角位移與電機電磁轉矩的仿真曲線。可以看出合閘時間為28.8ms,分閘時間為27.2ms,電磁轉矩最大值為311N·m,電機轉角為63°。通過仿真分析可以得出,驅動電機的電磁轉矩滿足40.5kV高壓真空斷路器負載曲線的要求,電機的設計滿足操動機構對電機本體的要求。

在中央電勵磁線圈分別通不同電流時,其動態特性對比如圖7所示。
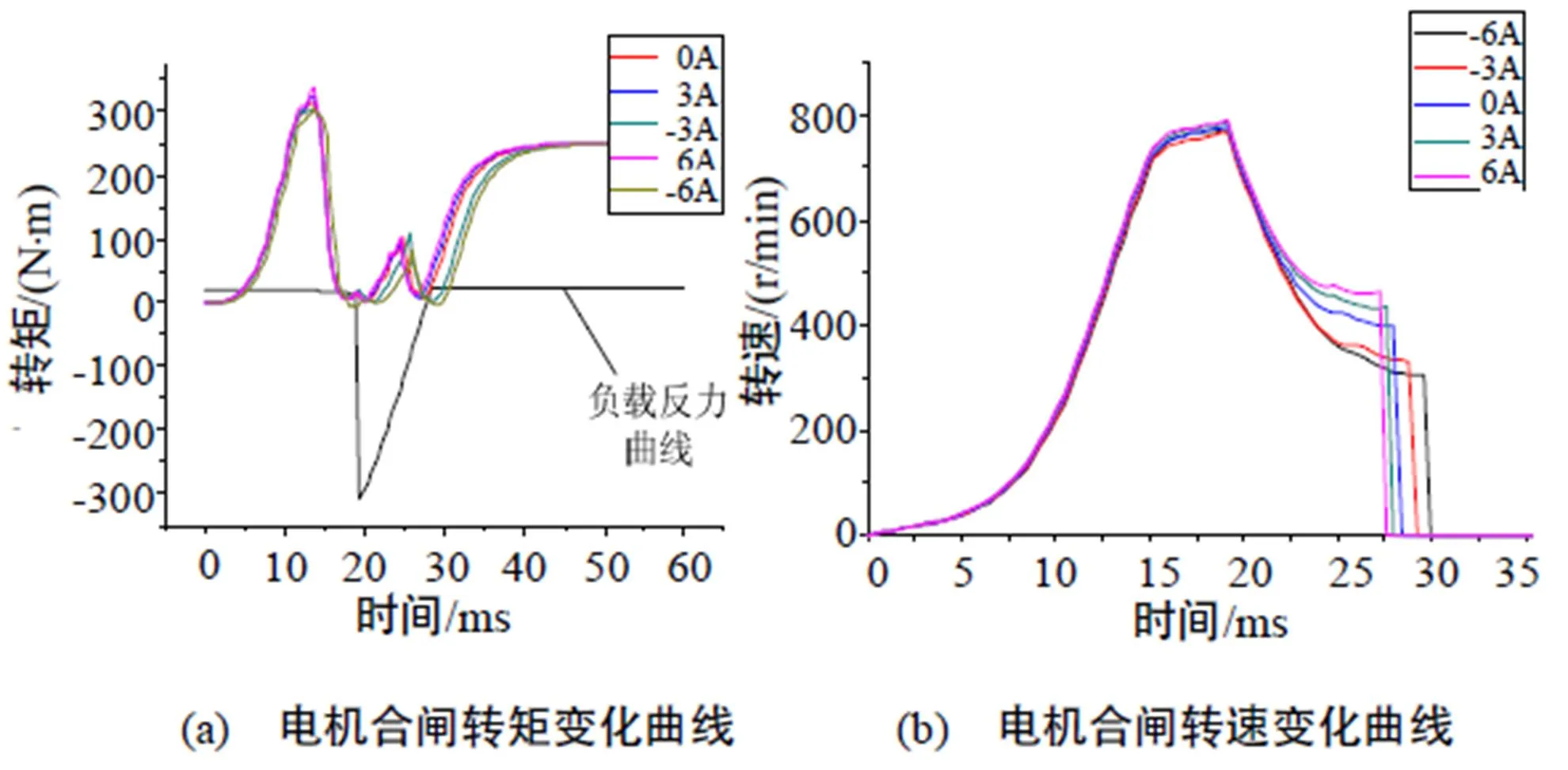
圖7 中央電勵磁線圈通電的合閘特性
分別給中央電勵磁線圈通-6A,-3A,0A,3A,6A的電流,可以看出新型無刷電勵磁電機在驅動高壓斷路器合閘操作時最大轉矩分別為295.6N·m,300.5N·m,312.2N·m,326.7N·m,336.5N·m,完成一次合閘操作的時間分別為30.1ms,29.2ms,28.7ms,27.2ms,26.8ms,可以得出給中央電勵磁線圈通電起到增磁或者減磁的作用,中央電勵磁線圈通入正電流,轉矩峰值增大,合閘時間變短;中央電勵磁線圈通入負電流,轉矩峰值減小,合閘時間變長,驗證了電機中央電勵磁線圈的調磁效果,擴大電磁轉矩調節范圍,提高驅動電機的動態調速特性。綜上所述,給中央電勵磁線圈通電可實現調節新型無刷電勵磁電機的轉矩及合閘速度。
3 新型無刷電勵磁電機操動機構控制系統設計
3.1 控制系統電路設計
本文以40.5kV高壓真空斷路器為研究對象,設計了新型無刷電勵磁電機操動機構控制系統。控制系統以數字信號處理器DSP28335為核心,輔以電源模塊、整流模塊、功率變換器模塊、及信號采集模塊等共同組成。圖8所示為控制系統原理框圖。

圖8 控制系統原理框圖
整個控制系統原理如圖所示:三相交流電通過整流橋再經過電容模塊進行濾波、儲能后給電機三相繞組進行供電;電機轉子位置、轉速以及三相電流通過信號采集模塊把信號傳輸給DSP處理器,DSP根據轉子位置信息輸出對應相的PWM信號到驅動模塊,驅動功率變換器各個開關器件的導通與關斷狀態,完成電機對應相的控制;DSP根據檢測到電機轉速和電流信息,以及系統給定轉速對PWM脈沖信號的占空比作出調整,從而實現控制系統對新型無刷電勵磁電機操動機構的運動控制。
3.2 功率變換器模塊
功率變換器模塊是整個控制系統非常重要的組成部分,電機換相需要依靠功率變換器模塊來實現。本文設計了三相半橋不對稱功率變換器,其拓撲結構如圖9所示。
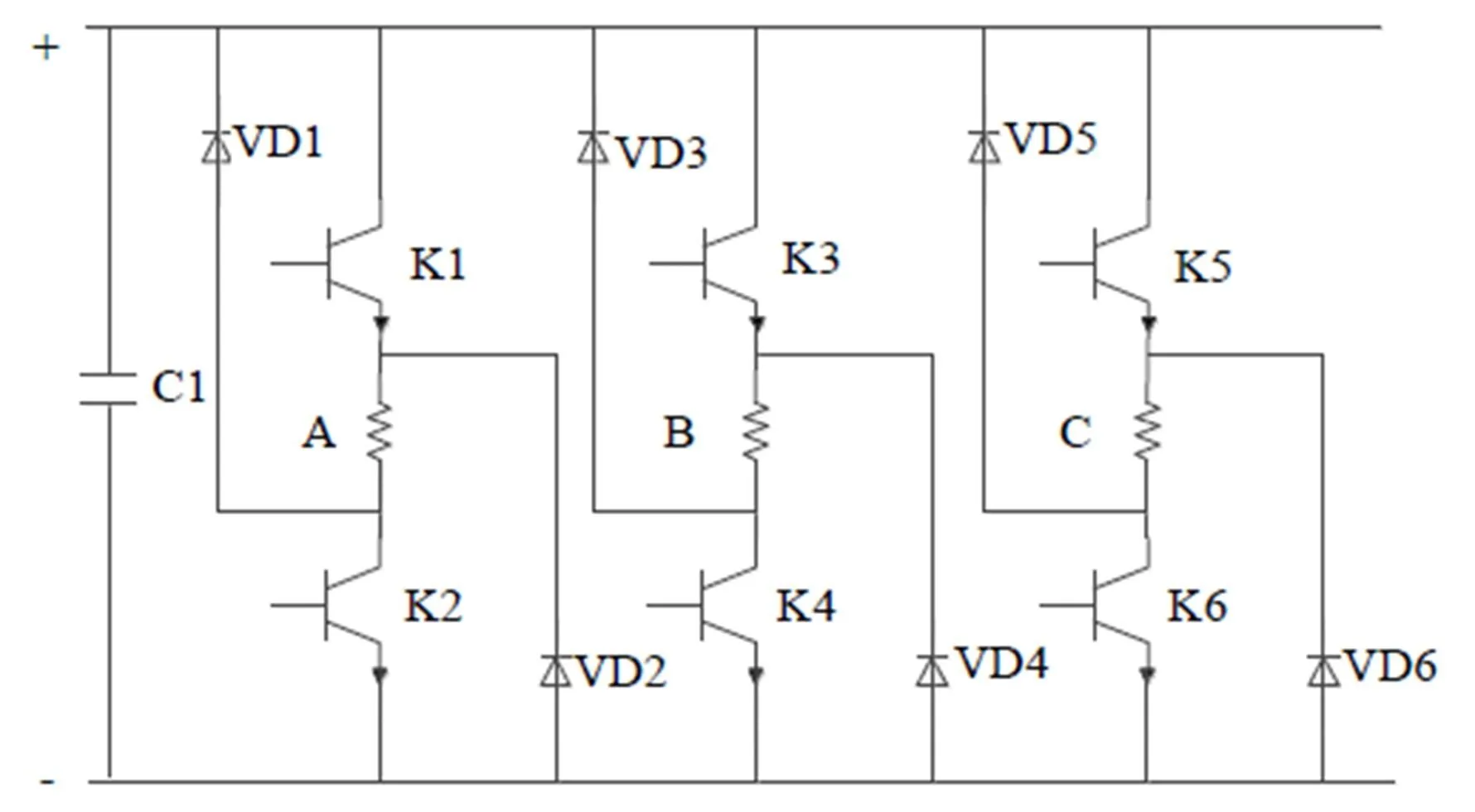
圖9 三相半橋不對稱功率變換器拓撲結構
三相半橋不對稱功率變換模塊對應與樣機的勵磁;繞組相連,三個橋臂分別對應電機的三相勵磁繞組,每個橋臂由兩個開關及兩個續流二極管組成。以一相繞組為例,若控制K1、K2導通,則VD1、VD2處于截止狀態,則A相繞組通電,若A相關斷即K1、K2不導通,此時VD1、VD2處于續流狀態,起到了保護電路的作用。
3.3 信號采集模塊

4 聯機試驗
以40.5kV高壓斷路器為試驗對象搭建新型無刷電勵磁電機操動機構聯機試驗平臺如圖10所示。包括新型無刷電勵磁電機樣機本體、40.5kV高壓斷路器樣機、三相調壓器、三相整流橋、電容電阻、核心數字信號處理器DSP28335、功率變換器模塊、信號采集模塊、IGBT驅動芯片、升壓芯片以及電源模塊等。三相繞組電流通過霍爾傳感器采集電壓信號之后傳輸到示波器上顯示。
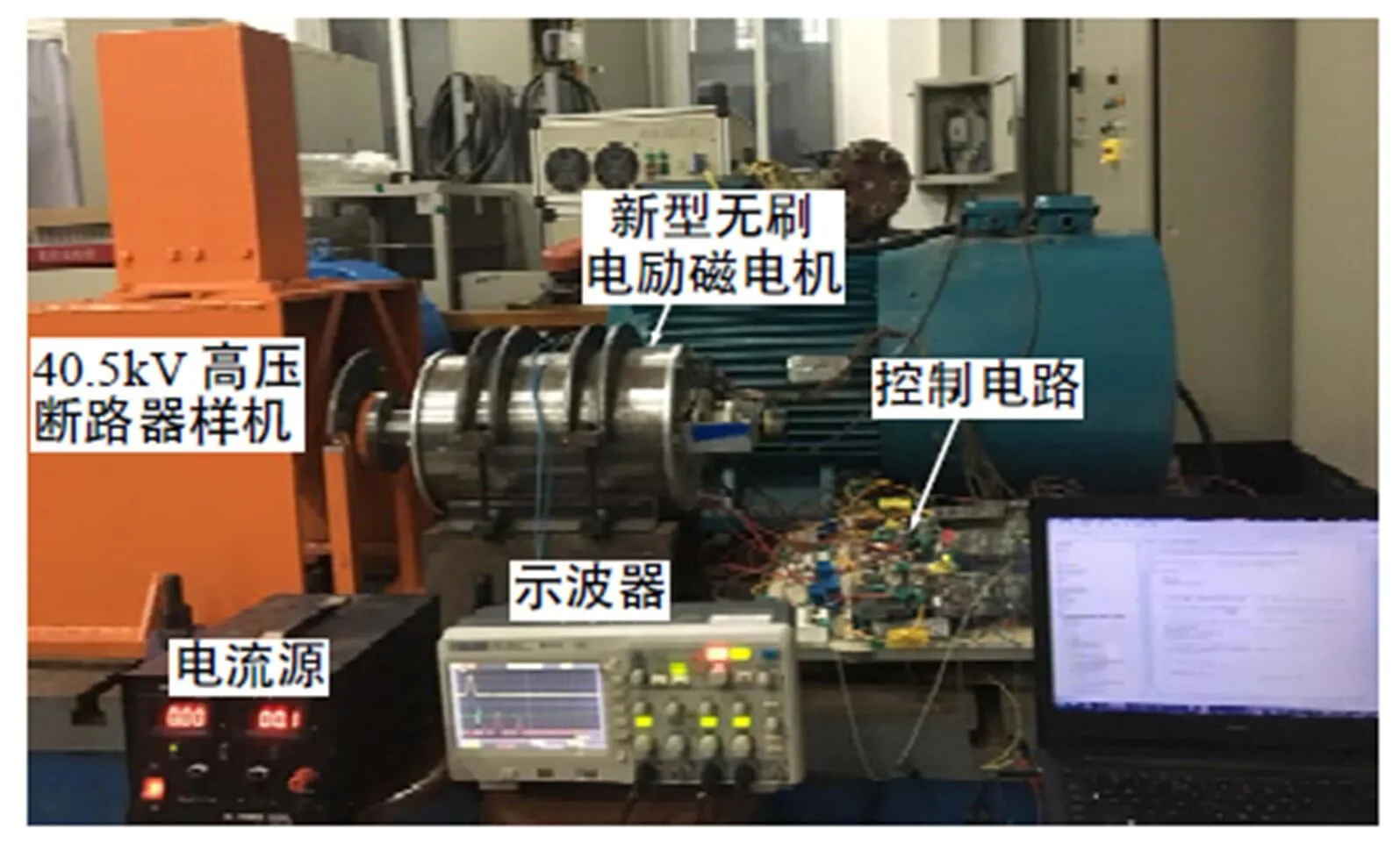
圖10 新型無刷電勵磁電機操動機構試驗平臺
對新型無刷電勵磁電機操動機構進行合閘操作試驗,電容器組的充電電壓為250V、電容器組的容量為132000uf、PWM占空比為90%。圖11所示為斷路器合閘試驗驗結果,如圖11中(a)所示,動觸頭行程為25mm,B點為剛合點,動觸頭運行至剛合位置B的時間是30.45ms。B之前為開距階段,B之后為超距階段,可以看出在超距階段,由于彈簧反力的增大及觸頭接觸碰撞導致行程曲線波動。合閘速度是剛合位置之前3/4行程內的平均速度,所以合閘速度是1m/s,聯機負載試驗比仿真結果稍有延時,但合閘操作仍在50ms內完成。如圖11中(b)所示合閘操作電機轉過的角度為63°。
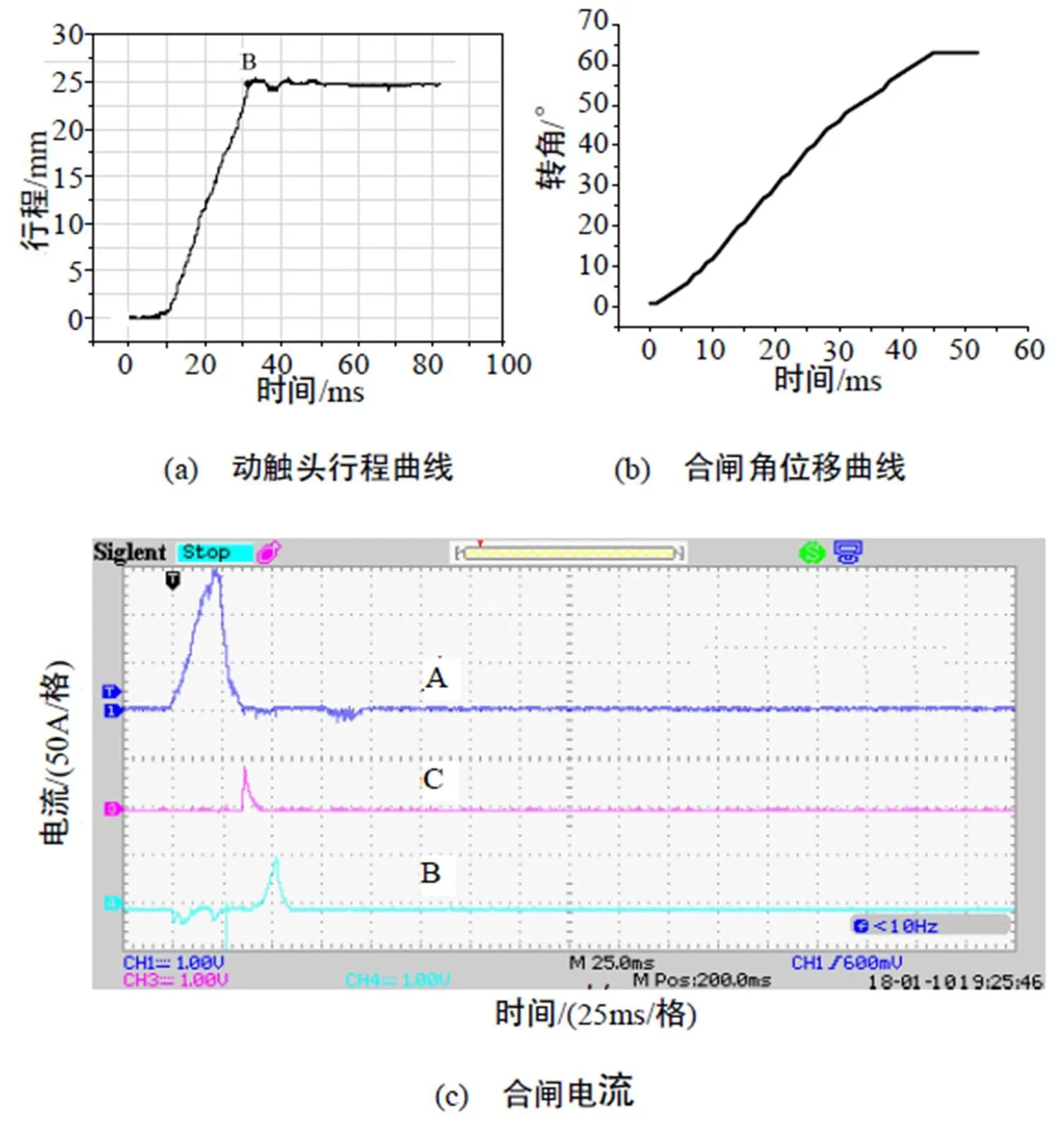
圖11 試驗結果
圖11中(c)為三相繞組電流,合閘峰值電流為152A。試驗結果符合40.5kV高壓斷路器合閘技術要求,證明了電機操動機構的可行性。
5 結論
(1)本文針對40.5kV高壓真空斷路器進行了運動分析,通過疊加原理對其負載反力特性進行了歸算,然后利用三維有限元軟件ANSYS針對斷路器負載特性對新型無刷電勵磁電機進行仿真分析。
(2)本文以40.5kV高壓斷路器為研究對象,搭建新型無刷電勵磁電機操動機構控制系統平臺并對其進行聯機試驗,試驗結果測得合閘時間為50ms,合閘平均速度為1m/s,合閘峰值電流為152A。試驗結果滿足40.5kV高壓斷路器的合閘技術要求,證明了新型無刷電勵磁電機操動機構的可行性。
[1] 李艷飛. 斷路器新型磁力操動機構的研究[D]. 大連理工大學, 2009.
[2] 陳保倫. 液壓操動機構設計[J]. 電氣工程學報, 2009(4):48-54.
[3] 陳保倫, 文亞寧. 斷路器彈簧操動機構介紹[J]. 高壓電器, 2010, 46(10):75-80.
[4] 魏忠永. 超高壓斷路器液壓操動機構的優化設計[D]. 浙江大學, 2010.
[5] 楊濤, 黃瑜瓏, 李大衛,等. 高壓斷路器電機操動機構技術的研究[J]. 清華大學學報(自然科學版), 2010(4):521-524.
[6] 李永祥, 林莘, 徐建源. 高壓斷路器永磁無刷直流電機操動機構的設計及動態仿真[J]. 電網技術, 2010, 34(1):185-189
[7] 李永祥, 林莘, 馬躍乾,等. 高壓斷路器新型電機操動機構的研究[J]. 電氣技術, 2008(9):78-83.
New Brushless Electric Excitation Motor Operating Mechanism Design and Experimental Research
LIU Aimin, LI Bo, YU Hao, YUAN Ye
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
In order to simplify the machine structure and improve the working reliability of the operating mechanism, taking the 40.5kV vacuum circuit breaker as the research object, a new type of brushless excitation motor operating mechanism is designed according to its dynamic mechanical characteristics.The load characteristics of the 40.5kV vacuum circuit breaker are analyzed, and the three-dimensional finite element analysis of the new structure motor is carried out by using the load reaction curve of the circuit breaker. On this basis, the hardware platform of the control system of the operating mechanism is built, the prototype of the 40.5kV vacuum circuit breaker and the prototype of the new brushless excitation motor are made, and the operation of the closing test verification is carried out. The simulation and test results meet the closing technical requirements of 40.5kV high voltage vacuum circuit breaker. The feasibility of the new brushless excitation motor operating mechanism is verified.
brushless electric excitation motor; 40.5kV vacuum circuit breaker; new structure motor operating mechanism; three-dimensional finite element; control system; test verification
TM311
B
1000-3983(2018)05-0058-05
2018-06-04
劉愛民(1961-),沈陽工業大學,從事智能控制、特種電機及其驅動系統研究,教授。

國家自然科學基金(51777131)