某型高炮火控系統并行通信信號檢測模塊設計
2018-11-13 05:55:18李玉琳郝巨東劉開源孫偉龍
火力與指揮控制 2018年10期
李玉琳,郝巨東,姜 滿,劉開源,孫偉龍
(北方自動控制技術研究所,太原 030006)
0 引言
我軍某型自行高炮武器系統是我軍機械化、摩托化步兵師(團)、裝甲師(旅)伴隨防空的主要裝備。目前,相當一部分該型毫米自行高炮已經到了或接近中修期,故障率普遍較高。然而,由于部隊缺乏必要的檢測診斷設備,導致不能及時掌握裝備的實際技術狀態,使很多故障不能及時發現。其后果是導致故障范圍擴大,影響訓練效果或使訓練不能正常進行。另外,對于故障裝備,部隊通常采用組合(單體)代換法來定位和修復,由于代換單體通常只能憑經驗進行,這一方面容易損壞正常組合(單體),另一方面使得整個連套炮車的故障單體都集中到了一門炮車上,每個連套至少有一門炮車長期處于故障甚至癱瘓狀態,嚴重影響了整體戰斗力。因此,考慮到戰時應急保障的實際需要,部隊隨時隨地能夠檢查、掌握本身裝備的技術狀況,加強部隊自身裝備保障能力建設已是迫在眉睫[1]。
通過配備的專用檢測計算機能夠實現對炮車火控系統的數據采集,達到總體性能測試的目的。然而,從本質上看,它僅僅是利用計算機并行通信功能將火控系統工作中的某些參數傳遞出來,計算一些基本的誤差,繪制一些曲線供技術人員參考。它是以設計人員的身份、從系統調試的角度來實現的。因此,對于部隊維修保障而言使用起來太過復雜[2]。
因此,本文設計并實現了一種針對該火控系統中的并行通信信號在線檢測模塊,通過對火控系統中主要節點并行通信信號的在線檢測,實現對火控系統的功能和性能監測,方便部隊維修保障,為進一步的性能測試和故障診斷打下基礎。
1 火控系統結構及監測點選擇
該型自行高炮結構復雜、技術密集,主要可以分為通用底盤系統、火力系統、光電火控系統、雷達系統和通信導航系統等。其中,通用底盤系統、火力系統以機械部分為主,本身也有很大的通用性,所以不在研究范圍之內。雷達系統雖然自身比較復雜,但是技術上和結構上的通用性也很強,并且與火控系統之間、與通信系統之間的連接關系比較單一,因此,只將雷達系統與其他分系統之間的接口部分納入研究范圍。而光電火控系統則是全新的,作為第一代自行式防空武器系統,其通信導航系統等也與以前大不相同,再加上全炮電氣控制系統等,這些分系統涉及單體多達30余個,信號耦合程度較深,是真正測試和故障診斷的難點,其光電火控系統原理如圖1所示。
鑒于火控系統的復雜性,不可能對每一個單體及其接口進行監測。因此,在具體實施時,應該選擇那些關鍵的、承上啟下的、能反應單體級以上工作狀態的節點進行監測。根據該火控系統采用多計算機分布式的技術特點,以系統中的專用計算機為主要監測對象,通過它們之間的數據傳輸監測獲取所需的信息,在此基礎上依據系統工作原理和這些節點之間的數值上的關聯關系,來判定某一分系統或者單體的實時工作情況[3]。圖2給出了選擇的主要監測點的分布情況。
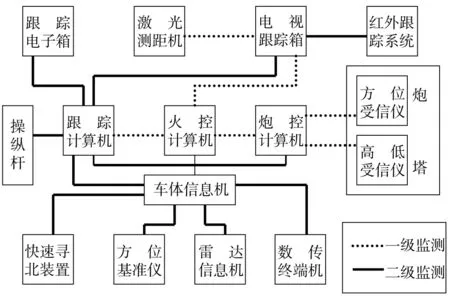
圖2 主要監測點分布圖
由于單體之間的并行通信一般需要10路通道以上,數據傳送時還必須在相應時鐘控制下進行,所以對并行通信信號的測試至少需要11路,如果是雙向通信則需要20多路。考慮到多點測試的必要性,所需路數還將成倍增加。一般而言,單路雙向測試可滿足大多數情況,此時需要至少22路。多點測試則通過時分方式進行復用。通過對選取的系統中主要監測點接口信號的分析可知,主要單體之間的接口信號均為并行通信信號,如下頁表1所示。
狀態監測的主要內容是對穩定跟蹤系統、火控計算機系統和火炮隨動系統等主要子系統的工作狀態進行監控;對火控計算機、穩定跟蹤計算機、車體信息處理主機、隨動控制箱、激光測距機、電視跟蹤器等主要單體通信信號進行監控和測試[4]。
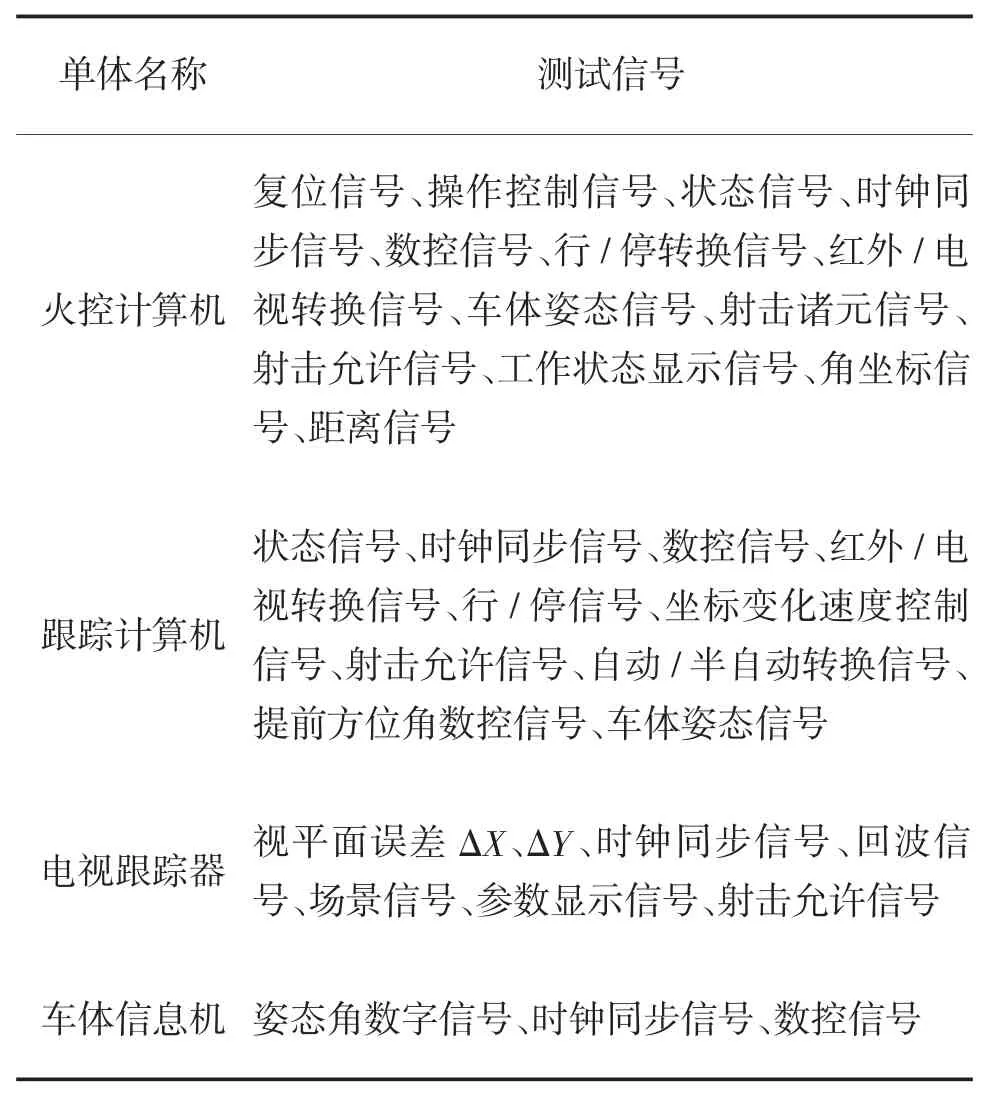
表1 部分主要單體待測信號表
2 監測系統及信號測試接口設計
2.1 系統結構及工作模式
整個狀態監測系統采用分布式結構,包括一個主監測模塊和若干個單體監測模塊,單體監測模塊可根據需要增減。各個單體監測模塊硬件和軟件完全相同,都能完成數據采集與處理、報警、狀態顯示等功能,不同的是由于各單體的信號在信號特征數據庫中的特征信息不同,所以由軟件根據數據庫采用不同的采集方法。各單體監測模塊安裝在自行高炮上,無間隙監測自行高炮火控系統各單體。主監測模塊為一臺裝有監測軟件的筆記本電腦,以串口方式與各單體監測模塊連接。單體監測模塊可獨立采集數據并進行簡單的處理,發出故障報警,所有單體監測模塊各自構成小型監測系統。單體監測模塊也可在主監測模塊的調度下進行數據采集并將數據上傳給主監測模塊,這時單體監測模塊變成了整個大監測系統的一部分,相當于整個監測系統的數據采集模塊。單體監測模塊在主監測模塊調度下工作時,主監測模塊所調度的單體監測模塊的數量可由主監測模塊根據需要決定,未被調度的單體監測模塊仍自行工作[5]。監控系統的基本結構如圖3所示。
其工作模式可以分為以下3種:
2.1.1 監測模塊單獨工作
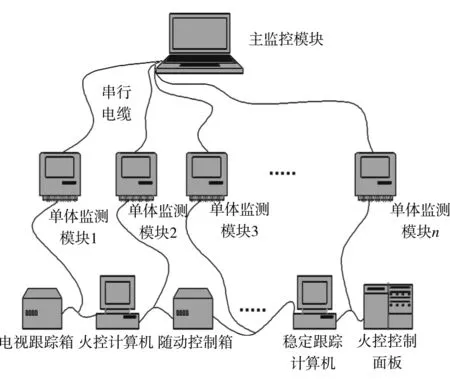
圖3 監測系統的結構
監測模塊可連接于需要監測的部位,無論靜止還是運動狀態,都進行實時連續監測。一旦發現異常,即發出報警信息,并給出詳細的出錯信息。在單獨工作時,應同時上報各種信息,只不過此時中心服務器(主監測模塊)不工作。這種情況適合平時作戰、訓練時使用。
2.2.2 靜止狀態下全系統監測
炮車處于靜止狀態時,對火控系統的工作狀態進行全面監測,采用多點同時監測的手段實施,能對火控系統工作過程中的各個環節進行詳細監測和分析。彈炮結合武器系統靜止狀態下進行的各種靜態和動態監測,適用于日常操作訓練、裝備技術狀態檢查、故障檢測與診斷等。
2.2.3 運動狀態下的全系統監測
在炮車行進過程中,主要限于關鍵部位狀態監測,主要包括目標跟蹤狀態監測、火控計算機諸元解算過程監測、隨動系統工作狀態監測、導航系統工作狀態監測等。此時監測的主要目的是反映裝備的整體工作狀況,及時發現異常或故障。采用分布式、小型監測裝置進行,提供狀態顯示和報警功能。
2.2 測試接口設計
對于系統級和分系統級測試而言,主要分為性能測試和故障隔離測試。性能測試的目的是對整個火控系統的靜態性能和動態性能進行測試,是基于系統完好、工作正常條件下的測試,因此,測試點不需要太多,只要能滿足需要即可。但是這些測試點必須同時進行采集,以保證數據的同時性。這里選擇了電視跟蹤目標數據、激光測距數據、火控解算數據、隨動控制信息、炮塔位置反饋信息。故障隔離測試時需要測試的數據更多,但是不一定非要同時測試,可以一次測試幾個節點,具體視故障診斷的需要而定。
采用“信號分組,數據優先”的原則進行設計。對于實時性要求高的、需要同時采集的數據(目標現在點、解算諸元、激光距離等)分作一組,利用觸發方式優先采集。為了減小高速采集時的數據量,配合火控系統固有的數據傳輸時序控制采集時長,并根據采集對象的不同選擇相應的觸發信號和基準信號。對于其余的狀態信號等分為第2組,利用上述采集的間隙通過連續采集方式進行采集。這些信號大多用來進行裝備工作狀態、信號是否正常等的判斷(從而便于進行單體間故障隔離)[6]。
此外,為了保持數字采集板的工作穩定性,所有時序控制邏輯需要的信號均由外部產生,避免自身相互控制可能出現的競爭沖突。
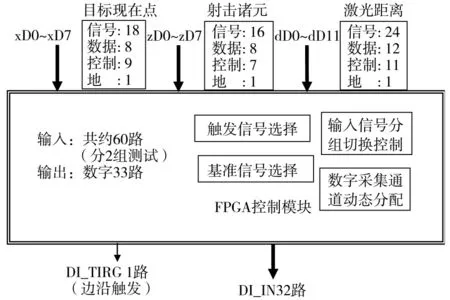
圖4 并行信號多點同時測試原理框圖
圖4是對跟蹤計算機輸出的目標現在點、激光測距機輸出的目標距離、火控解算輸出的射擊諸元和隨動高低、方位受信儀輸出的模擬驅動信號進行同時采集的原理框圖[7]。在需要對其他節點同時采集時,原理相同,只需對FPGA矩陣開關等重新配置即可。
3 測試模塊的應用
通過并行通行信號在線測試模塊可以實現火控系統的監測點的連續數據采集與分析,在此基礎上就可以進行系統的性能測試和技術狀態分析。
以火控計算機動態性能測試為例。
模擬條件下的動態性能檢測分為以下幾步:
1)將測試模塊與各主要單體對應連接,如圖5所示。
2)炮車上,將火控控制面板上的“工作狀態”開關置于“動態”位置,“工作方式”開關置于“主方式”位置,“戰斗方式”開關置于“停止”位置,“火控機模擬/全系統模擬”開關置于“全系統模擬”位置,“電視/紅外”開關置于“紅外”位置,接通目標模擬裝置的電源以及相應開關,啟動火炮隨動系統。
3)火控計算機內裝置有6條典型航路和1條實際航路,在完成上述準備工作后,火控控制面板上的“航路選擇”開關依次轉至1~7位置,即與上述航路相對,一般只檢查6條典型航路中的幾條就可以了。
4)在炮車上,按下鍵盤顯示器上的“復位”鍵,電視顯示器上的模擬目標按照所選航路運動,炮手即可截獲半自動跟蹤目標,然后左腳踏下“半自動-自動”轉換踏板轉為自動跟蹤目標,電視跟蹤現在點,火炮對準提前點,直到目標過航后,一個航路結束。
5)測試模塊與炮車協同操作,在動態模擬航路開始運行時,測試模塊采集數據、記錄、數據處理。在一個模擬航路結束后讀取動態解題值,并與動態解題標準值相比較。
6)如果需要錄取跟蹤圖像,可啟動錄像機和電視機。
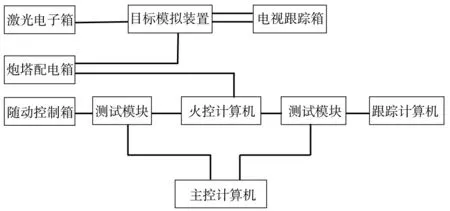
圖5 動態模擬精度測試連接圖
利用目標模擬裝置模擬目標航路數據,使火控系統工作在全系統模擬條件下。將事先設計好的標準航路數據,按照實裝接口信號格式和時序連續地灌入實裝中[8-11]。同時,利用設計好的并行通信信號在線測試模塊實時測試火控計算機的輸出射擊諸元信號。測試完畢后,將采集得到的連續射擊諸元數據與標準值進行對比分析,即可得出火控計算機的動態解算性能。
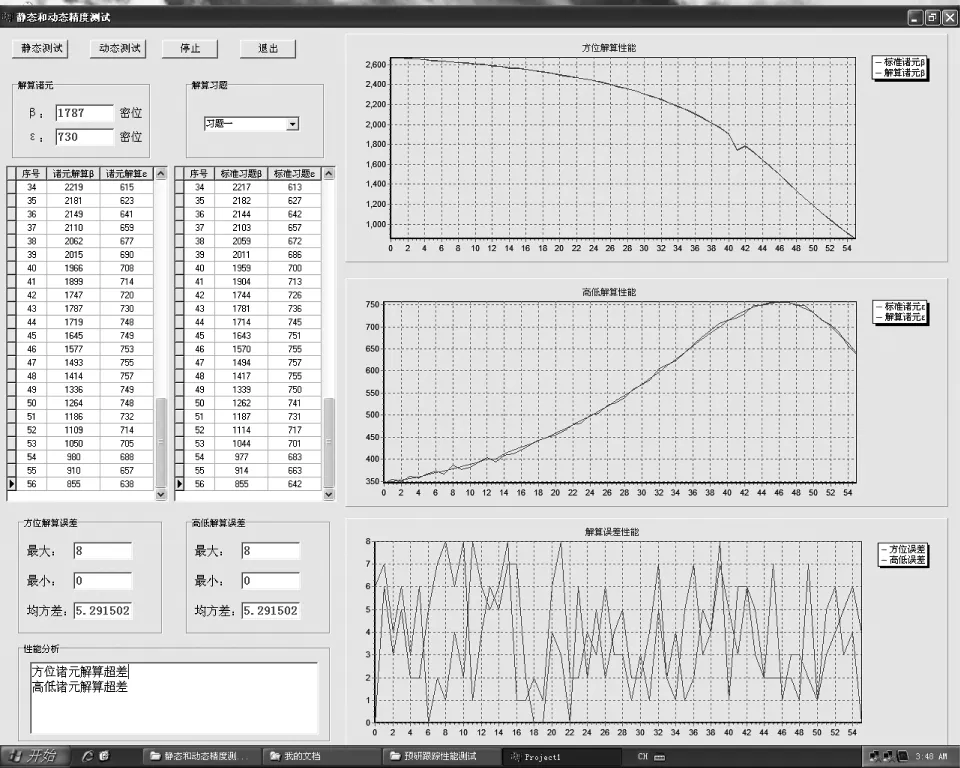
圖6 火控計算機動態性能測試結果分析圖
測試結果如圖6所示,圖6給出了測試數據與標準數據的對比曲線,并給出了各自的誤差情況,總的分析結果表明火控計算機的動態解題精度達到了系統的精度要求。圖6中,方位與高低解算與標準諸元基本吻合,體現了較高的解算精度。但是在高低諸元的解算之初,仍存在波動的狀態曲線,說明初始測量階段解算精度存在一定誤差。方位解算均方差與高低解算均方差為5.291,滿足測量誤差需求。
4 結論
本文以我軍現役某型自行高炮火控系統為對象,從裝備狀態監測的實際需求出發,設計了并行通信信號采集模塊,實現了對多個節點信號的同時測試。主要內容包括:1)課題研究背景及該型自行高炮火控系統分析;2)該型自行高炮火控系統監測系統的總體設計;3)并行信號的采集及分析。從一定程度上解決了該型自行高炮火控系統的精確監測難題,具有一定的軍事應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25