一種新型空間抓捕機構抓捕弱撞擊分析
2018-11-13 05:55:16武國梁解志堅李永振高碧祥
火力與指揮控制 2018年10期
關鍵詞:服務
武國梁,解志堅,李永振,高碧祥
(1.中北大學機電工程學院,太原 030051;2.北京航空航天大學,北京 100191;3.四川航天電子設備研究所,成都 610100)
0 引言
在軌的抓捕技術是指衛星本體航天器對目標衛星航天器的抓捕技術。在軌抓捕的關健是對目標衛星實現剛性連接,由于目標衛星既可能是合作目標衛星,也可能是非合作目標衛星,還可能是失效衛星。所以,如何抓捕目標衛星是現今世界各國在航天領域的研究熱點,各國均在積極研制用于在軌衛星抓捕的無人航天器[1-2]。本文介紹的抓捕機構可滿足對目標衛星的抓捕和釋放,該機構不僅能滿足衛星的特殊要求,而且,具有良好的機械性能(結構成熟,運動平穩,對目標衛星撞擊力小,抓捕牢靠,可抓捕可釋放)本文主要針對目標衛星靜止時服務衛星對其抓捕的抓捕機構的設計的研究分析,同時對該抓捕機構的導向機構中有無彈簧阻尼對目標衛星發動機噴管的撞擊力進行了分析[3-6]。
1 服務衛星抓捕機構的
1.1 工作原理
利用安裝在服務衛星上的一個可伸縮機構帶動抓捕鎖緊機構,實現對目標衛星的抓捕。當服務衛星的運動滿足抓捕的條件時,伸縮機構以一定的速度開始帶動抓捕機構緩慢伸出,抓捕機構接觸目標衛星發動機噴管時,為防止因撞擊力過大使得抓捕的目標衛星逃離,在抓捕機構前端設計有導向阻尼機構,從而吸收部分撞擊力產生的能量、減小抓捕時的撞擊力,(本論文著重研究阻尼機構對抓捕目標衛星的影響。)服務衛星和目標衛星的整體結構圖如圖1所示,加工原理樣機如圖2所示,抓捕機構如圖3所示,服務衛星的抓捕工作流程如圖4所示。
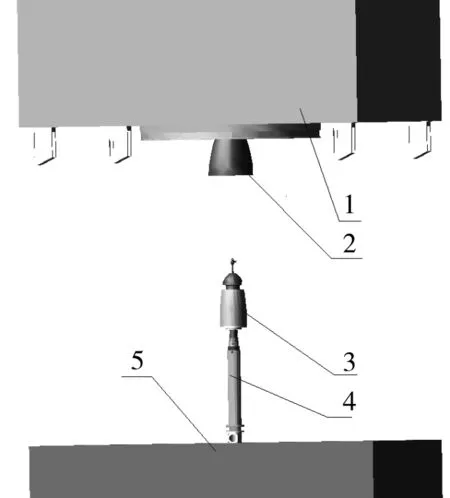
圖1 服務衛星和目標衛星整體結構

圖2 抓捕機構的原理樣機
1.2 導向阻尼結構的設計
當抓捕機構在伸縮機構的帶動下,緩慢進入目標衛星噴管內部時,抓捕機構會與目標衛星噴管發生撞擊,為防止撞擊對抓捕機構中的其他器件的損壞,減小撞擊時產生的撞擊力,設計了帶阻尼的導向機構[7-9];并且,為使抓捕機構順利進入目標衛星發動機噴管內,又需要設計導向機構中的導向瓣外表與目標衛星的噴管內壁表面相嚙合,使得抓捕機構順利進入目標衛星星噴管內。為此設計了可以導向又能減小撞擊力的導向阻尼機構,其結構如圖5所示[3]。
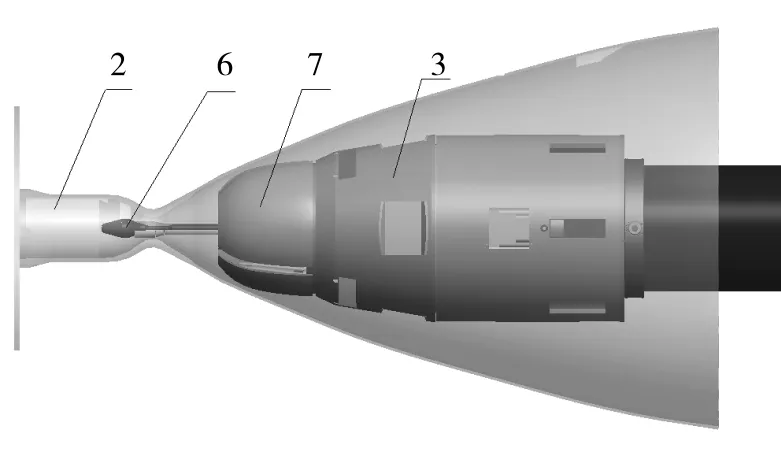
圖3 服務衛星抓捕機構
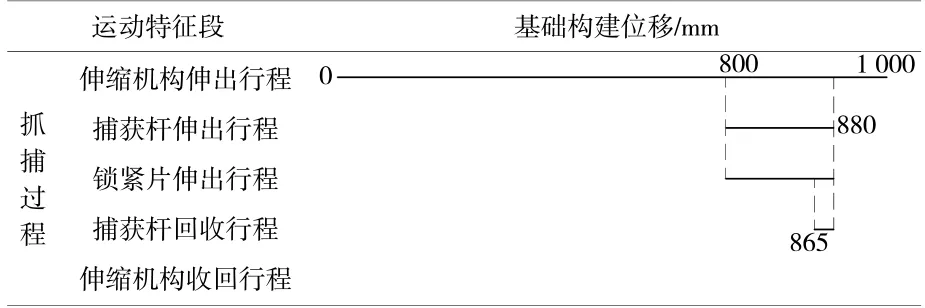
圖4 服務衛星工作流程
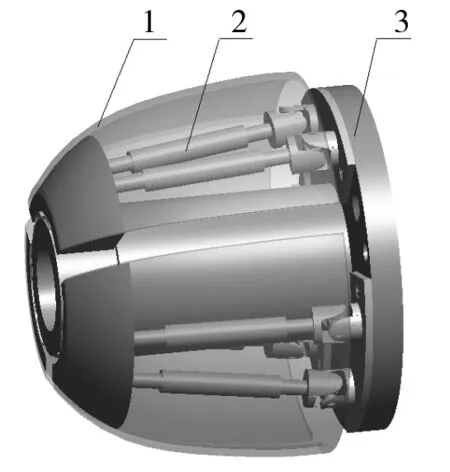
圖5 導向阻尼機構結構圖
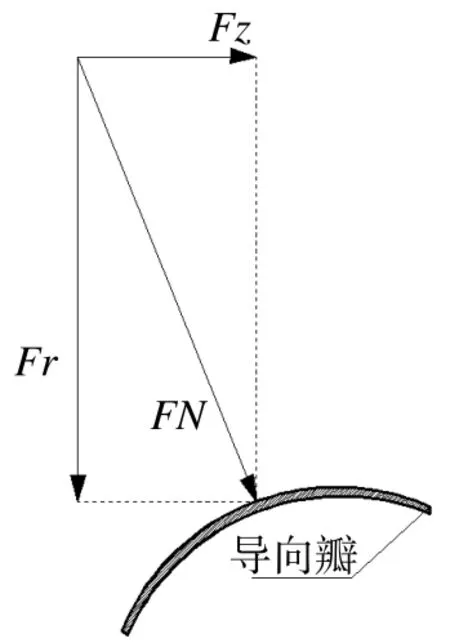
圖6 導向瓣受力圖
導向阻尼機構主要由導向瓣、阻尼桿和支架座等組成。由于目標衛星噴管的形狀近似漏斗形,因而該機構整體設計也呈漏斗,其由三瓣機構組成,每一瓣都有兩組阻尼桿支撐結構,使每個導向瓣均有4個自由度。當與目標衛星的噴管接觸時,會產生沿導向阻尼機構的法向碰撞力FN,該力可以分解成沿抓捕機構軸向力Fz和沿徑向的力Fr(如圖6所示)。并且,兩個方向的分力均使導向瓣帶動阻尼桿中的彈簧作運動,進而將撞擊力吸收,轉化成阻尼機構的內能,實現減小撞擊力的目的。
2 阻尼機構的建模分析
導向機構撞擊目標衛星的發動機噴管可以等效成一個彈簧阻尼,繼而,可以在ADAMS里設置加載彈簧的參數彈簧阻尼參數[10-14]。等效阻尼法將碰撞過程中碰撞現象處理為連續動力學,將導向機構撞擊目標衛星的發動機噴管的接觸力等效成一個彈簧阻尼模型如圖7所示。假設兩個物體的接觸點的曲率半徑分別為R1和R2,接觸面的法線方向設為n。考慮到材料的阻尼,采用廣義的Hertz公式接觸力具有如下形式[4]:

式(1)彈性力學中的Hertz剛度k,取決于材料特性和曲率半徑R1,R2,具體如下式:
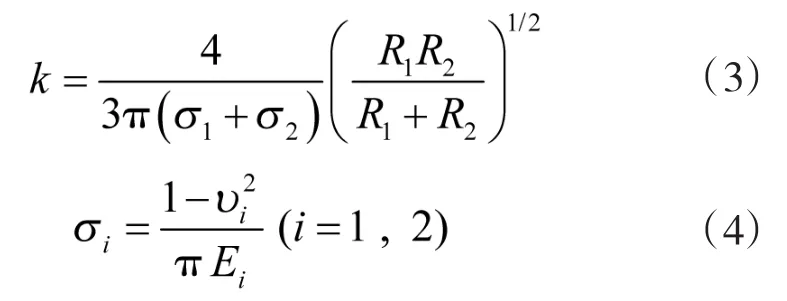
式中,R1為物體1的接觸面曲率半徑;R2為物體2的接觸面曲率半徑;σi為接觸面間的接觸應力;Ei為彈性模量;υi為泊松比;
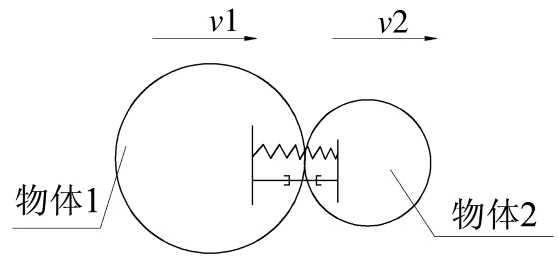
圖7 彈簧阻尼模型
3 ADAMS動力學仿真
動力學仿真的初始條件:
1)服務衛星質量2 200 kg;
2)目標衛星質量1 600 kg;
3)服務衛星與目標衛星的相對位置容差:X方向70 mm,Y方向70 mm;
4)角度容差:X 方向 1°,Y 方向 1°,Z 方向 1°;
5)目標衛星與服務衛星相對靜止;
6)目標衛星與服務衛星無重力環境下。
3.1 模型簡化與假設
影響空間衛星抓捕的的因素很多,為了簡化對接抓捕的過程,需要作如下假設:
1)ADAMS動力學模型按照實際的運動添加約束和接觸力,其模型不考慮各種誤差;
2)所有機構均按剛體處理。
3.2 建立動力學模型
利用UG建模軟件對不影響正常運動情況下對服務衛星的抓捕機構進行簡化并導入ADAMS中,根據各機構在實際工作環境中,添加抓捕機構的材料屬性和約束;并設置變量參數,最后完成動力學仿真的建立,如圖8所示,導向瓣的模型參數如表1所示。
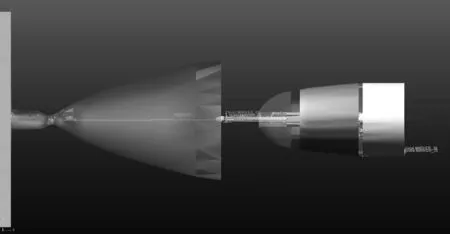
圖8 動力學仿真模型
3.3 模型參數設置
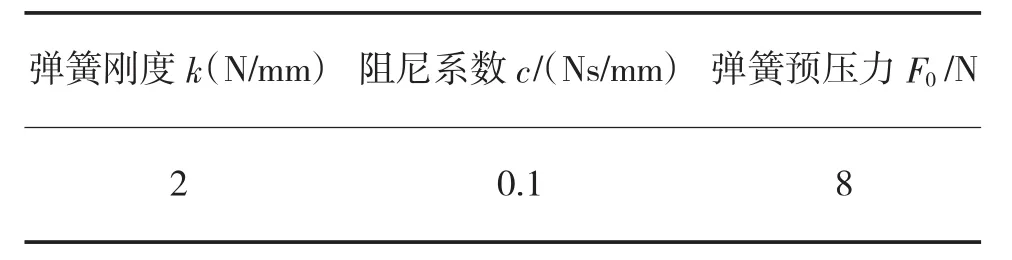
表1 設置仿真模型的基本參數
3.4 仿真分析
工作在空間的衛星即使受到很小的力,也會產生很大的轉動位移。因此,服務衛星抓捕機構對目標衛星發動機噴管撞擊力為研究的關鍵。本文在不同的速度下,導向機構有無阻尼情況分別測得接觸力如表2所示。
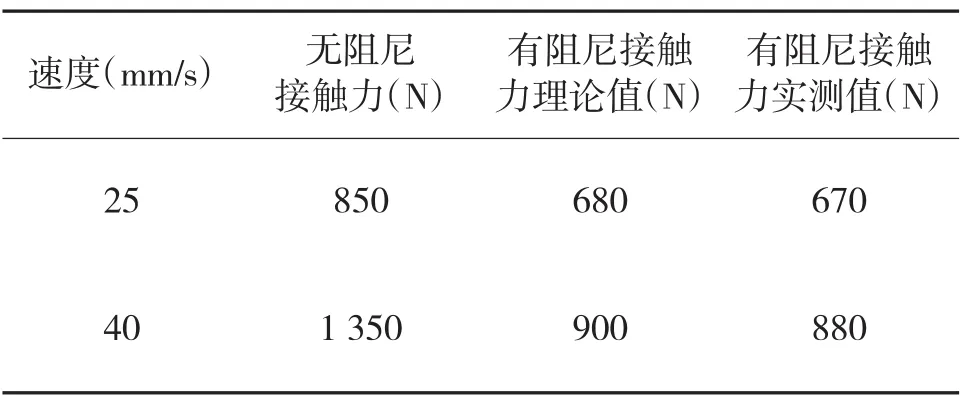
表2 導向機構在不同速度下有無阻尼的接觸力
由表2可知該抓捕機構在25 mm/s和在40 mm/s運動速度時,導向瓣有阻尼器比無阻尼器導向機構的撞擊力可以減少15%左右。
導向瓣在有阻尼器和無阻尼器的情況下,導向瓣撞擊目標衛星發動機噴管的接觸力如下頁圖9和圖10所示。
通過上述兩種速度下有無阻尼器的情況對比分析可以看出,安裝上阻尼器能夠有效降低導向瓣與噴管間的接觸力,接觸力大約減小15%。
通過仿真分析可知有阻尼比無阻尼抓捕機構撞擊目標衛星后,目標衛星在空間的上下左右各個方向的位移量有所減小(大約15%),尤其在上下方位的位移量降低比較明顯,如圖11和圖12所示。
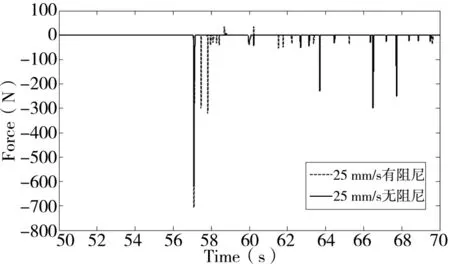
圖9 V伸縮=25 mm/s時導向瓣與噴管的接觸力
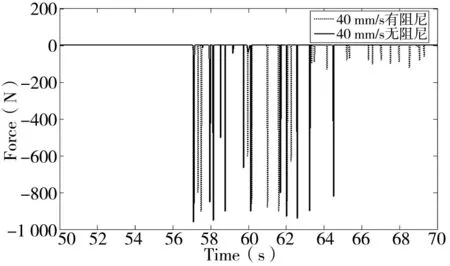
圖10 V伸縮=40 mm/s時導向瓣與噴管的接觸力
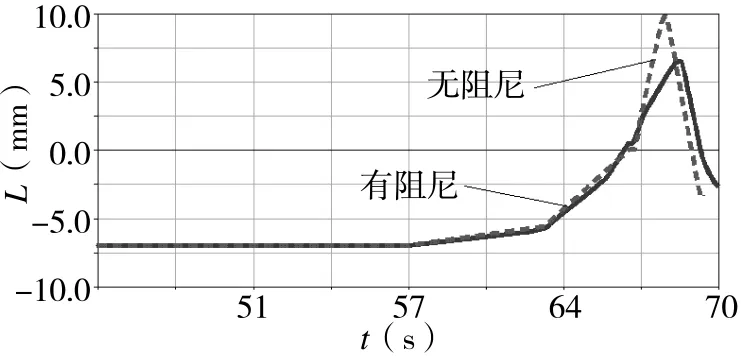
圖11 目標衛星在有阻尼與無阻尼兩種情況上下方位的位移
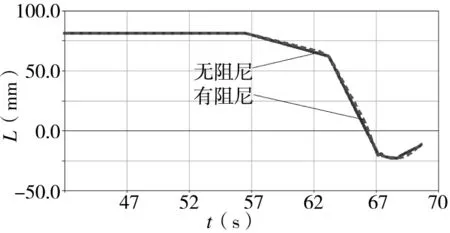
圖12 目標衛星在有阻尼與無阻尼兩種情況左右方位的位移
4 測試結果
1)試驗條件
①試驗環境為有重力和空氣的實際環境;
②服務衛星沿著軌道直線運動,目標衛星懸掛在架座上;
③抓捕器安裝在服務衛星前端。
2)試驗過程
由于空間環境都是無重力的,但是,此試驗只是模擬階段,因此,試驗的環境是在有重力的情況下,對抓捕頭中的導向機構在有阻尼的機構對目標衛星抓捕進行試驗,試驗結果與仿真結果較為相符,試驗過程如圖13所示和試驗結果如表3所示。

圖13 樣機抓捕試驗圖
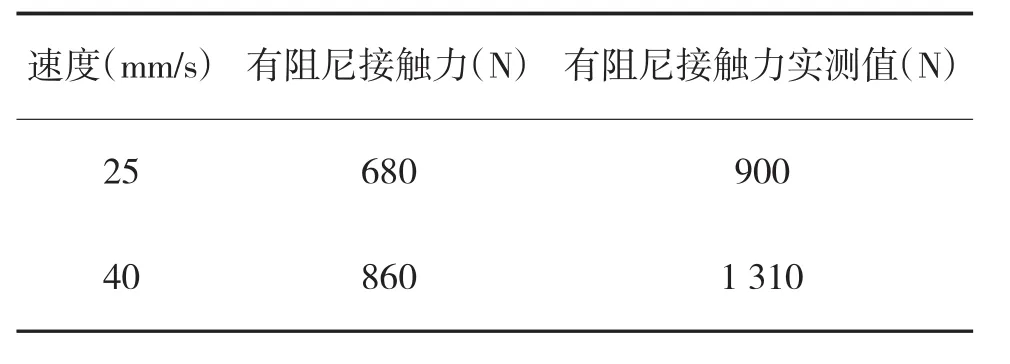
表3 導向機構在不同速度下有理論與實測值阻尼的接觸力
5 結論
1)為了完成特殊抓捕結構的CEO衛星的在軌服務要求,在參閱大量國內外的空間抓捕機構的基礎上,設計了一種新型衛星抓捕機構;
2)由表2可知撞擊力減小15%左右;
3)由圖11和圖12可知有阻尼的抓捕機構比無阻尼的抓捕機構撞擊目標衛星后,目標衛星偏轉位移減小約15%;
4)導向機構在25 mm/s和40 mm/s速度下有阻尼的接觸力理論值與實測值的誤差為1.5%和2.2%誤差較小滿足設計要求。
5)該服務衛星的抓捕機構中導向阻尼機構為在軌服務提供新的結構設計。
猜你喜歡
杭州金融研修學院學報(2022年5期)2022-06-15 11:41:48
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年11期)2019-08-13 00:49:08
今日農業(2019年13期)2019-08-12 07:59:04
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
銅仁學院學報(2018年4期)2018-06-13 03:21:34
商周刊(2017年9期)2017-08-22 02:57:56