小型固定翼無人機自主起飛控制系統
2018-11-16 09:11:26劉洪丹權申明程建華王春華
實驗室研究與探索 2018年10期
孫 蓉, 劉洪丹, 權申明, 程建華, 王春華
(1. 哈爾濱工程大學 自動化學院, 哈爾濱 150001; 2. 中國人民解放軍92956部隊,遼寧 旅順 116041)
0 引 言
近年來,隨著高新電子技術的飛速發展,無人機(Unmanned Aerial Vehicle,UAV)在我國被更多人熟知,并有越來越多的科技工作者以無人機為載體進行各種實驗與研究[1]。如今,無人機被廣泛應用于軍事偵察、靶標演練、防災救援、航空拍攝、物流快遞、農業基礎建設當中,具有極為廣闊的市場和前景。
從小型無人機的應用領域來看,無人機的作用已經從最初地以電子愛好者為主的娛樂研究拓展到了救援、航拍方面,甚至已經在物流和農業植保方面異軍突起。我國的基本農田面積高達18億畝,廣大農民在噴灑農藥時,仍使用傳統方式[2]。數據顯示,每年有將近10萬人因農藥而中毒,其中,農藥致死率約高達20%。而采用無人機進行作業,作業效率可提升30倍,且對農藥作業者的損害幾乎降低為零,同時也降低了勞動人員成本[3]。
無人機主要形式有多旋翼、固定翼、直升機等;根據動力來源的不同,可將無人機分成油動型、電動型、混合動力型等[4]。這些類型的無人機各有特點,在不同的工作環境及工作任務下,發揮著各自的長處,其中油動機續航能力一般較電動機的時間長,旋翼機具有可垂直起降、運動靈敏度、懸停的獨特優勢。
固定翼無人機比旋翼型無人機續航能力更長,水平飛行速度更快,可完成遠距離、大載重的飛行任務[5]。研究表明,固定翼無人機較載人機的氣動系數高了3倍之多,其機外形與大部分客機、戰斗機等機種類似。因此,對固定翼無人機的研究,也可廣泛應用于客機、戰斗機中去,這個特點也成為了固定翼無人機一直深入研究的主要因素。
飛機起降過程平均所占時間只有整個飛行時間的2%~3%,然而在飛機事故統計中,有60%~70%的事故發生在飛機起降階段[6]。這兩個數字對比之下,便能發現飛機起降控制技術對飛機安全飛行的重要意義。因此,對固定翼無人機起飛階段自動控制技術的研究不僅能指導其自主起飛,同時也能為載人機的安全起飛提供研究基礎。現有固定翼無人機自主起飛的相關文獻中,多是對系統進行仿真分析,而忽略了實際飛行實驗的重要性,因此,本文的工作很有意義[7-9]。
1 自主起飛控制系統實現方案
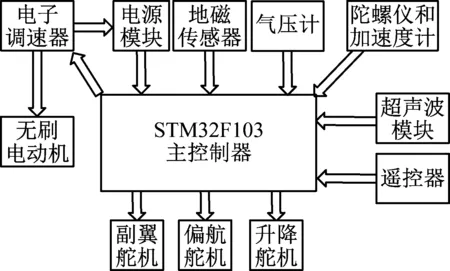
自主起飛的實現需要制作無人機機架,根據系統要求選型無人機所需無刷電動機與舵機并安裝。根據系統所需的主控芯片和傳感器以及外圍電路,設計固定翼無人機飛控電路板[10]。同時,還需進行遙控器控制下的飛行測試,以驗證各模塊的性能。該固定翼無人機除機架外,無刷電動機作為無人機飛行的主動力執行元件,鋰聚合物電池提供電能,電子調速器作為無刷電動機驅動模塊。同時,超聲波模塊和氣壓傳感器采集高度信息,陀螺儀和加速度計敏感無人機載體的姿態角以及角運動,主控制器根據控制算法,解算出當前狀態及計算出目標狀態,通過升降舵機、偏航舵機、副翼舵機對無人機姿態進行調整,以實現固定翼無人機自主起飛過程中姿態的穩定控制。圖1為固定翼無人機硬件平臺結構。
2 硬件設計
2.1 電動機與電源設備選型與參數
電動機作為整個系統的執行元件,其性能直接影響著系統的控制效果,通過對控制系統的分析,對主無刷電動機和舵機進行選型,并根據電動機參數選擇合適的電源(動力電池)和電子調速器,以適應電動機的特性。
無刷電動機具有體積較小,質量較輕的特點,同時輸出轉矩較大,非常適合航模使用。同時該電動機本身幾乎沒有勵磁損耗和碳刷損耗,節電率可高達20%~60%,電能使用效率高,從而延長續航時間。主電動機選用無刷電動機,型號為:朗宇無刷電動機X2820,具體參數:定子外徑28 mm、定子厚度20 mm、軸徑5 mm,質量143 g、空載電流1.1 A、最大持續電流52 A/30 s,KV值為920。該款電動機采用新型槳座設計,便于拆卸,同時電動機軸采用隱式,使得電動機更加安全,0.2 mm厚度的鐵芯,電動機工作時溫度更低,大大提升了電動機效率。其中,KV值是衡量電動機扭力性能的一種參數,根據KV值的定義,將KV值乘以輸入的電壓值,就是無刷電動機的空轉極速。通常來說,同等情況下,內轉子電機的空轉極速大于外轉子,但是當安裝了螺旋槳之后,內轉子電機的極速會降低到空載極速的30%~40%,而外轉子電機的極速仍能能保持在空載極速的60%~70%。在內轉子無刷電動機中,為了能提供較大的力矩,需要增大電流,因此電機速度降低,而外轉子電機扭力較大,因此,外轉子無刷電機非常適合航模飛行中。該無刷電動機的KV值為920,其額定電壓為11.1 V(3 s),在額定電壓下其空載轉速可達1 0000 r/min。
該型號電機配合槳葉型號為APC13x6.5,這種搭配下,可以使槳、電機發揮更大的優勢,獲得更高的螺旋槳效率。螺旋槳直徑為26 cm,螺距為6.5 cm。高速旋轉的螺旋槳產生拉力,常稱螺旋槳單位時間所作功為螺旋槳的有效功率N,其值為飛行速度v與螺旋槳的拉力P的乘積。
模擬舵機作為執行器,舵機一般由控制電路、電機、舵盤、減速器、位置檢測這幾部分組成。舵機控制電路將輸入的連續PWM信號轉換成所要達到的角度,當位置反饋的角度與目標角度一直時,直流電動機停止轉動。舵機體積較為緊湊,穩定性好,且控制簡單,是航模中槳葉角度控制的理想電機。
(1) 翼/副翼、方向舵。選用輝盛S90型號電機,自身質量10 g,可輸出力矩為1.5 kg·cm,響應時間為0.3 s/60°,自身質量輕,容易控制。該舵機為模擬舵機,輸入信號為周期20 ms的PWM矩形波,當輸入高電平時間為1.5 ms時,舵機位于中間位置。其擺動角度范圍為0°~180°,對應輸入高電平時間為0.5~2.5 ms。
(2) 升降舵。因為升降舵所需力矩較大,選用S3010舵機,該舵機自身質量為41g,輸出力矩高達6.5 kg/cm,響應時間為0.16 s/60°,滿足系統要求。該舵機為模擬舵機,輸入信號為周期20 ms的PWM矩形波,當輸入高電平時間為1.5 ms時,舵機位于中間位置。其擺動角度范圍為0°~180°,對應輸入高電平時間為0.5~2.5 ms。
為了使電機和電子調速器達到最大電流的輸入,選用的電池為航模常用的3S 2200mah 30C鋰電池,該電池的額定輸出電壓值為11.1 V,最大持續輸出電流值高達66 A。電池電芯為鋰聚合物,這種新型電池具有質量輕,零記憶效應,可充電次數多等優點,但電池的容量仍然是電動無人機續航時間最重要的制約因素。
電子調速器,簡稱電調。該電調持續輸出電流可達60 A,最大電流80 A(不小于10 s),滿足電機對電流的要求,同時內部自帶欠壓、過壓、過熱、遙控器信號丟失保護,為系統的安全性提供了有力的保障。電調的作用是將控制器輸出的PWM信號,轉換為頻率可變的三相交流電,供給無刷電動機。同時,該電調具免電池電路(Battery Elimination Circuit,BEC)輸出功能,中文名為,可將電源電壓穩壓在5 V,供給飛行控制系統,其BEC輸出電流可達5 A,可驅動主控芯片以及舵機、其他外設正常工作。同時,電子調速器還具有以下功能:① 安全上電保護功能:接通電源后,為避免造成誤傷,不會馬上啟動電動機;② 電壓溫度異常保護功能:當電調處于異常狀態,如:欠壓/過壓/過熱時,通過降低輸出功率或者不啟動,對設備進行自我保護;③ 遙控器信號丟失保護功能:當丟失遙控器信號2 s后,自動關閉信號輸出。
2.2 飛控電路板設計
通過Altium Designer軟件進行電路原理圖的繪制和PCB電路板的布局、走線設計。飛控電路板包括了STM32主控模塊、電源部分、SWD下載調試部分、模擬/數字電壓轉換部分、氣壓計、MPU6050三軸陀螺儀與加速度計、MS5611地磁場傳感器、LED顯示部分、硬件復位部分、遙控器信號接收部分、電機輸出部分、串口接口、兩個超聲波接口、OLED液晶屏顯示模塊,同時預留了GPS模塊接口[11]。所設計的飛控電路板原理圖如圖2所示。主控芯片選用STM32F103RCT6,該款芯片的硬件資源非常豐富,SRAM為48 K,FLASH為256 KB,8個16位計時器,通用計時器有4個,基本計時器和高級計時器各有2個,2個DMA控制器,1個USB接口,1個CAN總線,串口數為5個,IIC總線數為2個,SPI總線數為2個,可通過SDIO接口讀取SD卡,通用IO口數目也高達51個。
3 控制算法設計與仿真
自主起飛階段控制器的輸出量為升降舵舵角、偏航舵舵角、副翼舵舵角,為了實現穩定控制,結合自動控制原理和現代控制理論知識,對以上幾個量進行閉環控制。在飛行的校正中使用經典的PID控制器,其具有簡單可靠、參數易調整、通用性高、魯棒性強的特點[12-13]。對常用的PID控制器執行流程和參數設定進行介紹,圖3為PID控制器方框圖。
3.1 俯仰角控制器設計

起飛階段俯仰角反饋回路如圖4所示。
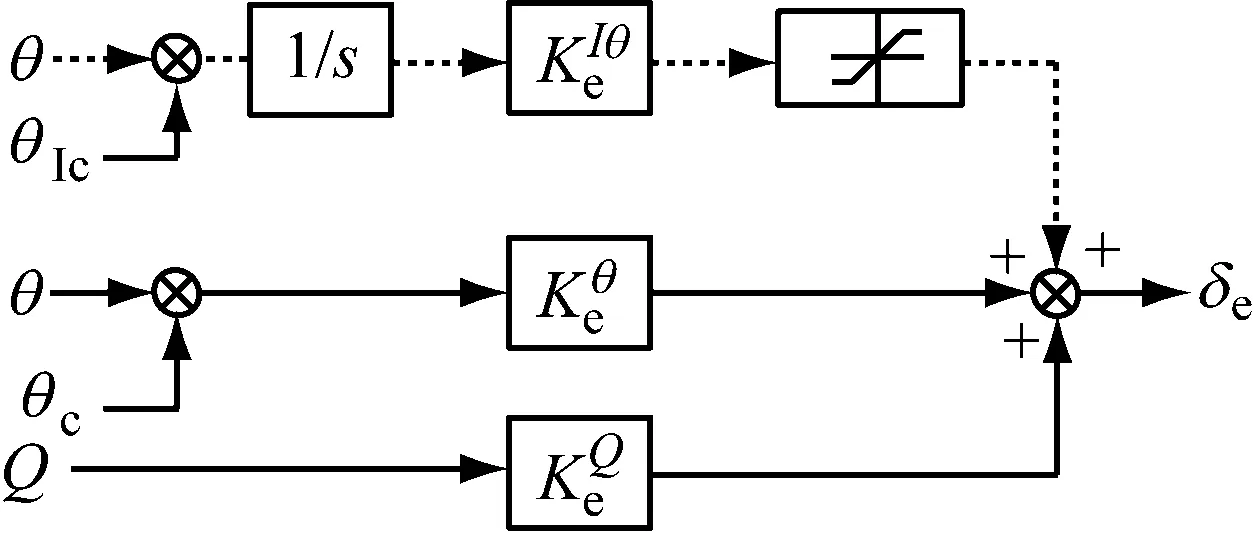
圖4 起飛階段俯仰角反饋回路
3.2 滾動角控制器設計

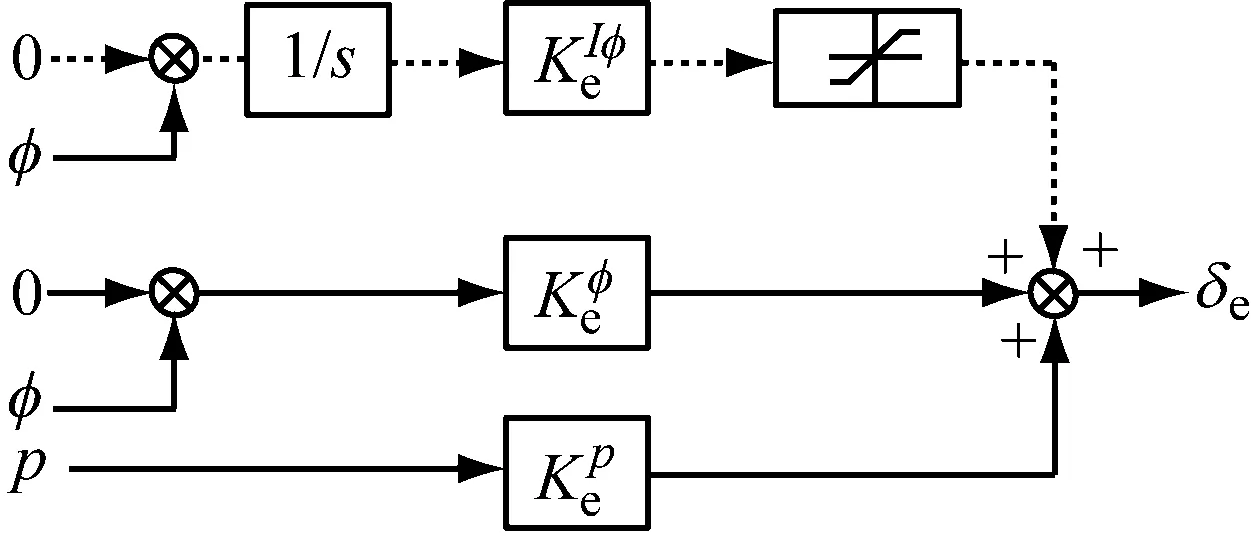
圖5 起飛階段滾動角反饋回路
3.3 偏航角控制器設計

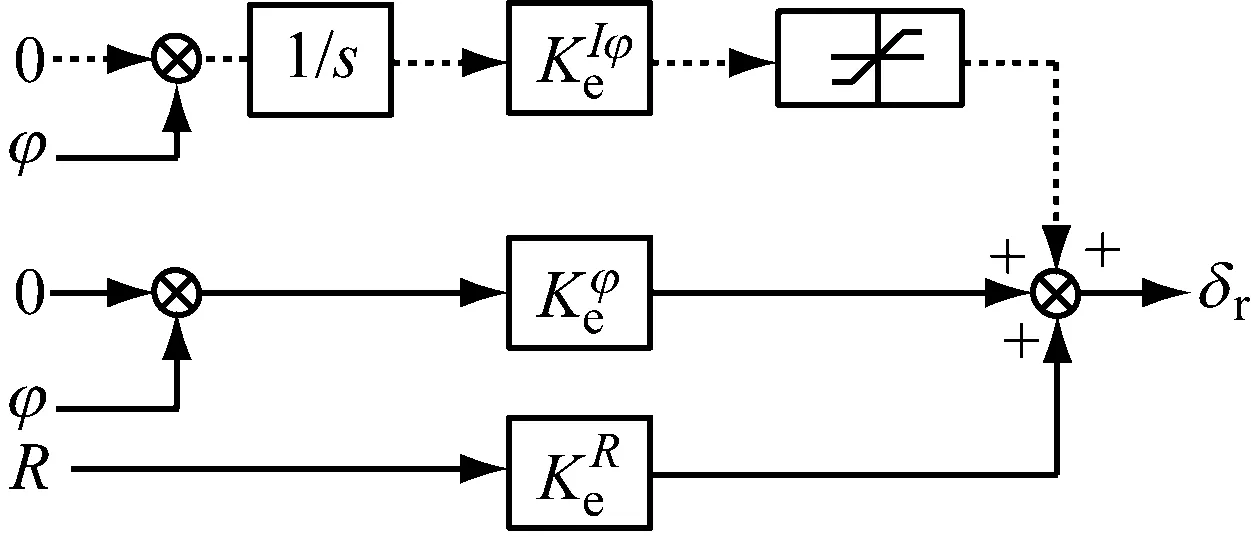
圖6 起飛階段偏航角反饋回路
4 系統測試
4.1 系統測試結果
根據Matlab/Simulink仿真模型中,PID控制器的設計,運用C語言所學知識對無人機自主起飛平臺進行自主起飛控制算法的編程、調試。選擇空曠的操場進行多次實物飛行試驗,調節系統控制器參數,優化無人機自主起飛控制效果。在實際飛行試驗時,為了將數據采集分析,使用預留的串口接口與無線模塊相連接,編寫程序,在PC端串口助手接收數據并保存,使用Matlab軟件繪制曲線圖,如圖7~11所示。
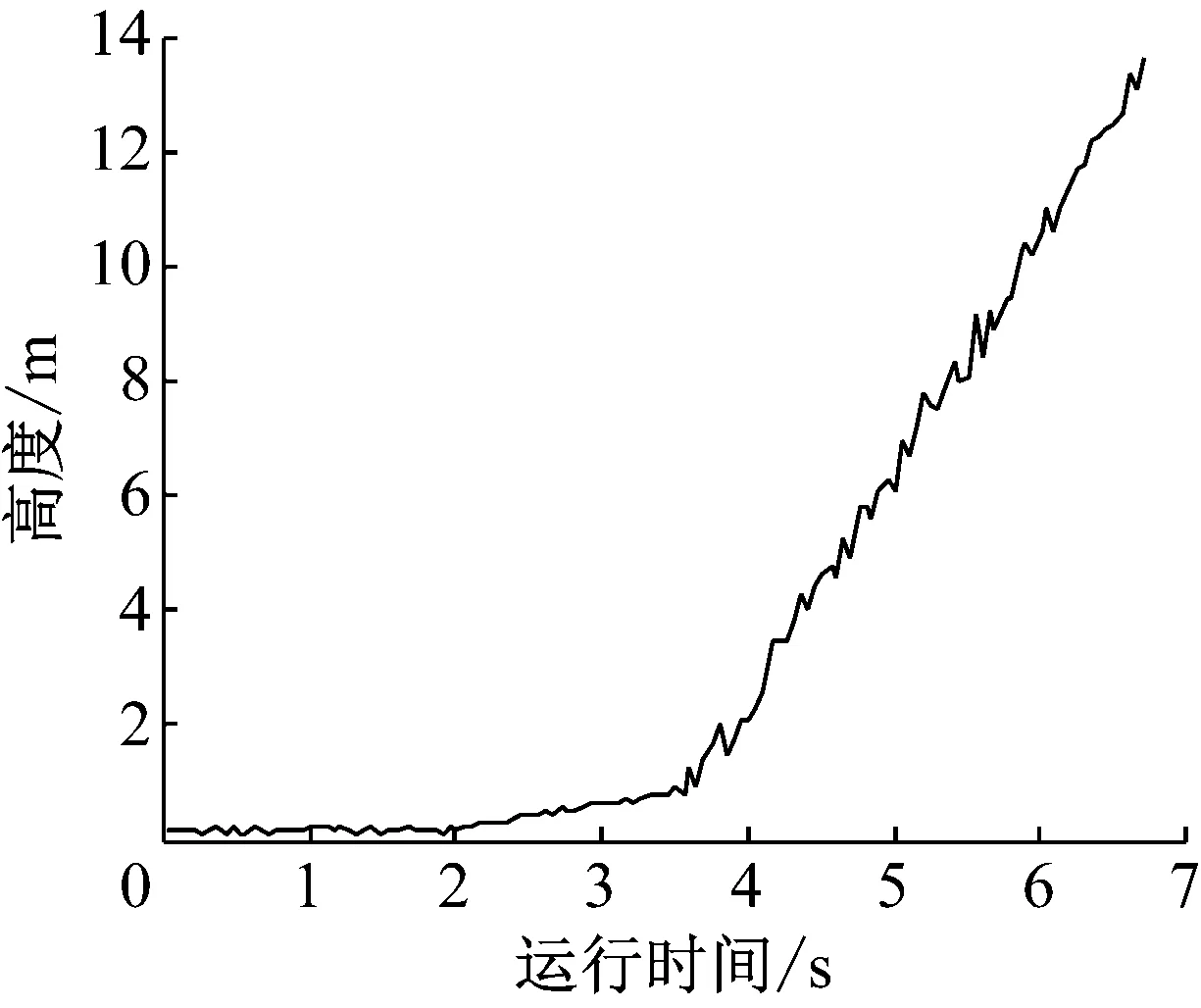
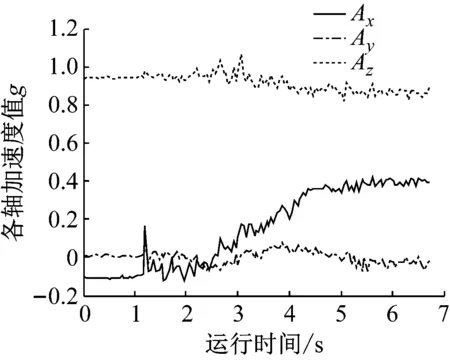
圖8 無人機實際飛行加速度計采集數據
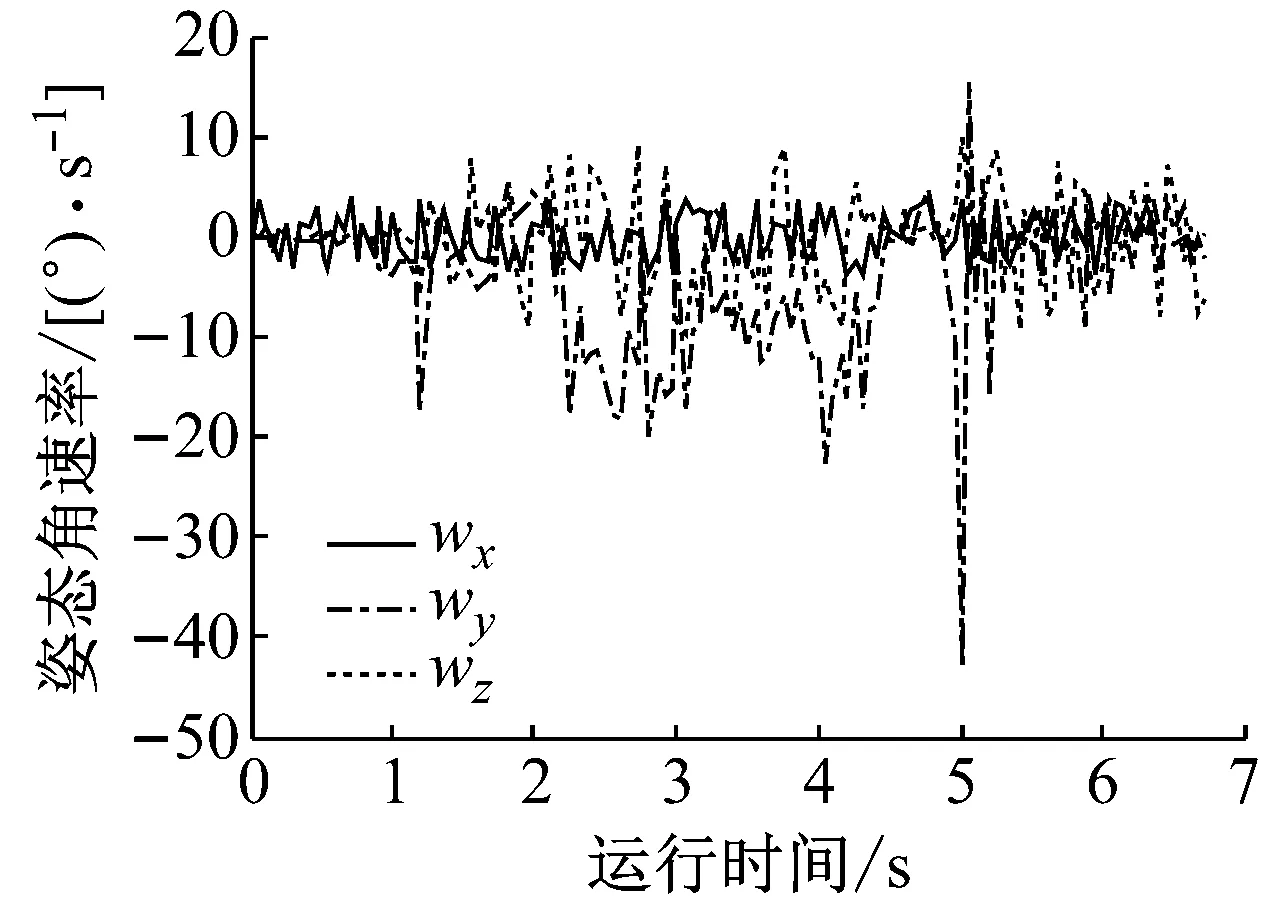
圖9 無人機實際飛行角速度采集數據
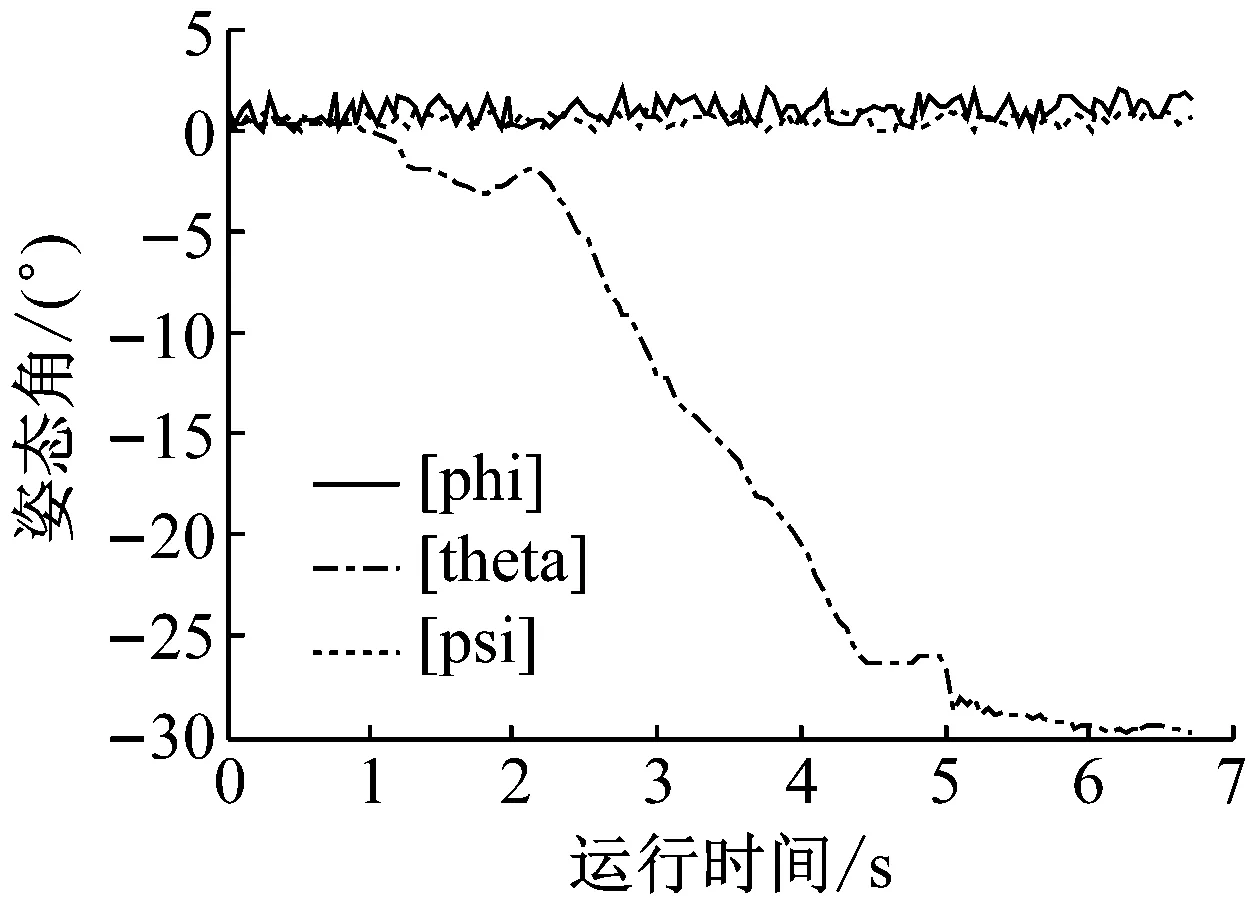
圖10 實際飛行姿態角采集數據
經多次實驗,使用風速儀測試風速,在風速為5~8 m/s情況下,無人機迎風自主起飛。無人機在2 s時前輪離開地面,機身稍稍抬起,此時俯仰角約為3°,之后速度繼續增加;到3.6 s時,無人機后輪離開地面,此時俯仰角大小為17°,繼續加速進入爬升階段,當達到13 m高度時,自主起飛階段結束,此時無人機俯仰角為30°。
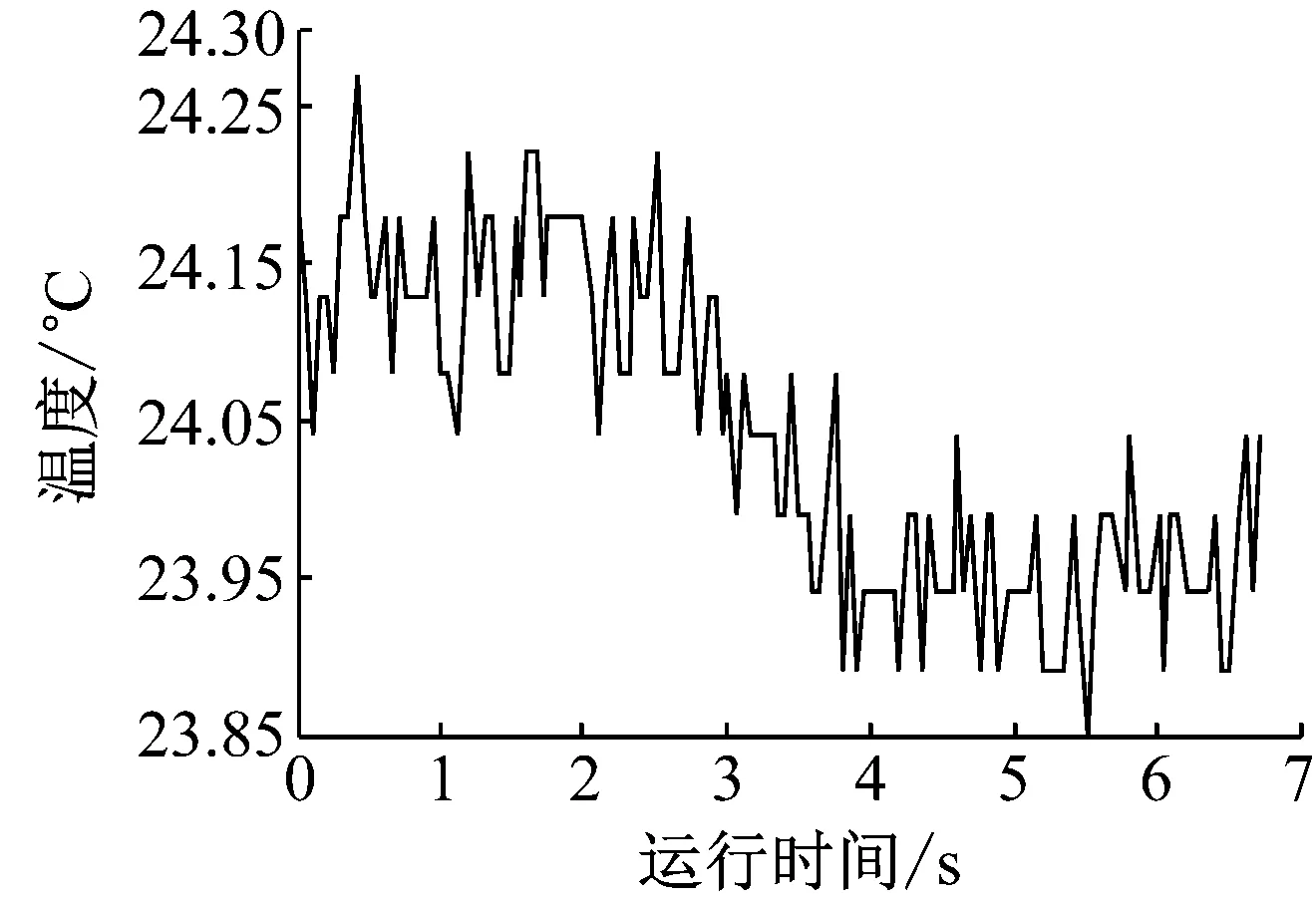
圖11 實際飛行溫度采集數據
4.2 測試誤差分析
調試結果與理論分析和建模仿真存在偏差,經多次實驗、分析與總結,本系統中的誤差來源主要有:
系統參數測量與實際值存在誤差,對轉動慣量、慣性積、距離、質量等關鍵參數的測量存在誤差,這些主要來源于測量方法或者測量工具的誤差。
無人機在自主飛行時,存在的干擾因素難以精確建模,同時,系統建模時存在一些非線性因素,為了簡化模型,進行了假設和線性化,同時,在系統實際調試中,存在大量滯后、延遲環節,導致無人機最終模型的相角裕度較小,系統會出現小幅震蕩。
在飛行控制系統中,傳感器對無人機姿態的測量存在誤差,測得數據受溫度、震動等因素的影響,電機高速轉動時產生的強磁場,以及無人機機架的震動,都會對傳感器采集數據造成干擾,濾波算法也只能減弱這種影響,并不能完全抵消。
主電動機、各舵機響應速度、精度特性的測量等存在誤差,電機的死區并未得到完全補償,或補償過度。隨著電機工作時間的加長,通電產生的熱量使電機發熱,同時,無人機飛行過程中電池電量逐漸降低,也會使得電機特性產生一定的變化。
5 結 語
本文針對小型固定翼無人機自主起飛階段建模困難、控制復雜、非線性耦合等問題,對無人機起飛階段進行動力學和運動學分析,建立滑跑起飛方式的動力學和運動學模型,設計自主起飛控制算法,并制作無人機作為算法驗證對象。通過大量實驗,驗證了起飛階段控制律的有效性,通過無人機自主起飛平臺的系統測試,驗證該控制系統的可行性和穩定性。