智能小車的避障控制系統(tǒng)的單片機設計研究
2018-11-19 09:14:40路雪松金亞玲
時代農(nóng)機 2018年9期
楊 睿,路雪松,金亞玲
(沈陽工學院,遼寧 撫順 113122)
隨著智能技術的進步,機器人技術也日趨被高校的教學所關注,機器人在高校的體現(xiàn)形式主要就是智能小車的避障的學習和設計,該小車具有動作靈活,便于操作等方面的優(yōu)點,在智能小車上安裝有避障傳感器可以實現(xiàn)小車的避障功能和安裝相應的數(shù)據(jù)處理模塊進行處理,當避障模塊檢測到前方事物時可以通過程序改變小車的行進方向和行駛速度,以保證不會發(fā)生碰撞。本設計主要包含單片機控制系統(tǒng)、傳感器的檢測、電機的驅(qū)動模塊和自動避障的接口電路等組成。縱觀很多智能小車都只采用單個傳感器。
1 控制系統(tǒng)的硬件系統(tǒng)設計
1.1 控制芯片
該控制系統(tǒng)采用的是STC89C52芯片,隸屬于51系列單片機,該單片機具有對小車的數(shù)據(jù)讀取和采集的功能,根據(jù)信號的采集進行控制并對小車的轉(zhuǎn)速、轉(zhuǎn)向和障礙進行避障等控制。
1.2 超聲波傳感器模塊
目前智能小車傳感器使用較多的超聲波模塊和紅外接受傳感器兩種。其中紅外傳感器具有漫反射和自反射兩種形式,都是通過對近處物體進行探測和識別,然后將檢測到的信號通過電信號送給控制的單片機;超聲波傳感器的模塊分為發(fā)射模塊和接受模塊,主要是用于測量前方物體的距離,能夠避開前方障礙物。
1.3 LED顯示模塊
目前LED數(shù)碼管分為共陽極和共陰極連接,該避障小車采用的是共陰極數(shù)碼管連接的形式,公共引腳接的是地,在引腳接收到高電平時數(shù)碼管被點亮。此電路位也位于小車的控制板上,由小車的電池提供供電源。如圖1所示。
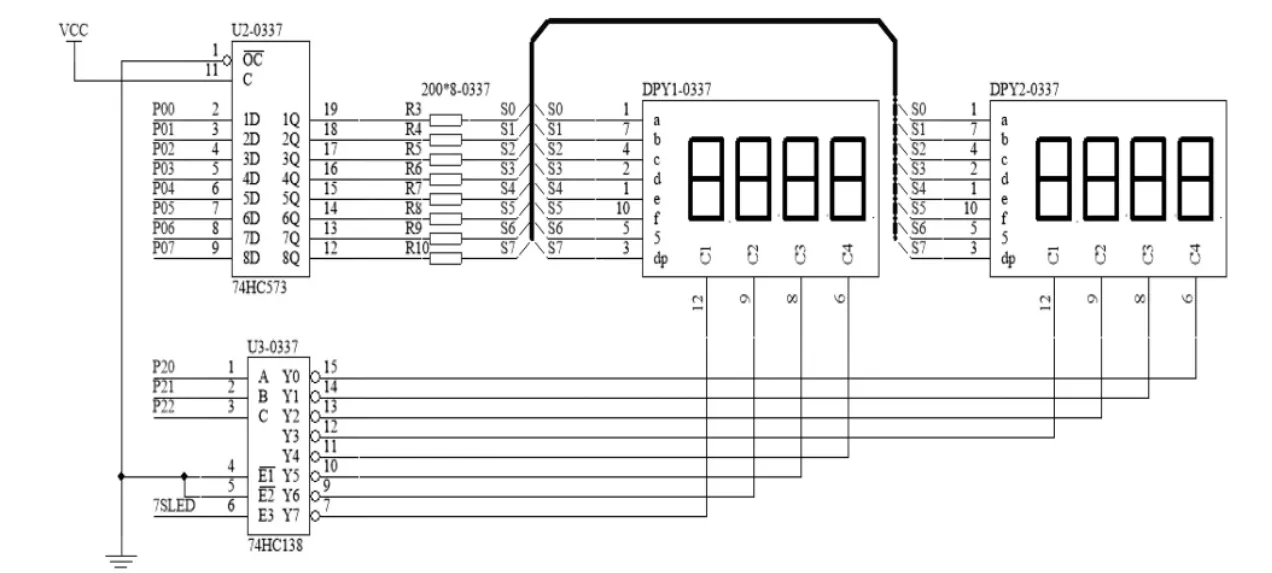
圖1 LED數(shù)碼管顯示接口電路圖
2 智能小車的軟件設計及實現(xiàn)
該設計采用C語言進行編譯,具體的程序流程圖如圖2所示。
實驗結(jié)果:本設計不僅實現(xiàn)小車的多面避障,還存在傳感器探測速度快,避障成功率高等特點。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
