智能小車的循跡控制系統的單片機設計研究
2018-11-19 09:14:40路雪松金亞玲
時代農機 2018年9期
李 心,路雪松,金亞玲
(沈陽工學院,遼寧 撫順 113122)
STC89C52單片機屬于51單片機系列,具有結構簡單,便于理解,輸入輸出共計40個引腳,P0-P4四組P口,并且STC89C52比STC89C51多了一個中斷源和定時計數器。
電機驅動模塊:采用功率三極管作為功率放大器的功能,來實現對直流電機進行輸出控制。電機驅動模塊是一個線性型驅動的電路的結構,該電路具有結構簡單,速度較快的能力很強,具體電路采用由達林頓管組成的電路,電路如下圖所示。用單片機控制達林頓管使之工作在占空比可調的開關狀態下,精確調整電動機轉速。這種電路長期工作在開關狀態下,兩種工作模式下,分別是飽和狀態和截至狀態,開關效率非常高,該電路保證了電機的轉速和電機的轉動方向的控制,開關速度的穩定性也極強,是一種使用率很高的PWM調速技術。
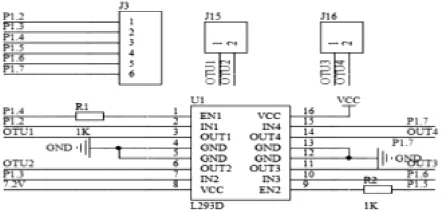
圖1 電機驅動模塊接線圖
通過程序與硬件的緊密結合來實現小車的各種功能。用keil μVision4進行編寫程序,先新建一個工程,然后編寫C語言程序,然后添加到該工程中并生成十六進制文件即可,先安裝燒寫軟件和驅動,然后讓傳輸線與小車相連,打開燒寫軟件,將所生成的程序燒寫到單片機中。
通過單片機引腳的輸出控制兩個電機的旋轉,使用占空比實現兩個電機速度的控制。兩個電機相同速度正轉即為前進,相同速度反轉即為后退,左電機速度小于右電機速度即為左轉,右電機速度小于左電機速度即為右轉,這幾種運行狀態構成了小車最基本的行動功能。
小車底部的兩個紅外傳感器發射紅外線光,通過能否接收到反射回來的紅外線信號來控制電機的運行狀態。如果左側紅外光照到黑線處,黑色的反射能力很弱,接收器沒有接收到反射回來的光信號,則單片機就會控制左側電機停轉使小車左轉。同理,如果右側紅外光照到黑線處,小車就會右轉。這兩個動作周而復始,就實現了小車的循黑跡功能。小車循跡程序流程圖如圖2所示。
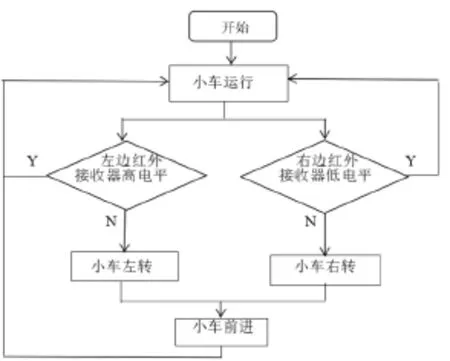
圖2 循跡程序流程圖
該控制系統具有較好的控制和調速、轉向功能,能按預期的期望實現小車的循跡功能,對黑線循跡效果很好。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中國科技論壇(2017年7期)2017-07-25 08:49:53
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
電子設計工程(2015年15期)2015-02-27 12:07:30
