基于矩陣指數的點云配準方法
2018-11-21 08:56:12楊正世李文國
自動化儀表 2018年11期
關鍵詞:方法
楊正世,李文國
(昆明理工點大學機電工程學院,云南 昆明 650500)
0 引言
點云配準技術是研究不同視角,即不同參考坐標下的一組點云或多組點云。通過某種算法,將具有一定重疊度的點云數據,通過平移旋轉縮放等操作變換到同一參考坐標系下,進而得到實體完整的點云數據信息[1]。它是整個三維點云數據處理中的關鍵步驟,不但為后期的點云數據建模提供了較為精確的點云數據,而且為構建高精度的模型提供了保證。該技術廣泛應用于3D游戲[2]、物體識別[3]、大壩測量[4]、文物保護[5]、醫療矯形[6]、機器人點位導航及自動地圖構建[7-8]等領域。
點云配準的關鍵在于求取變換矩陣。目前常用的點云配準算法,是由Paual J和Besl[9]在1992年提出的最近點迭代(iterative closest point,ICP)算法以及基于ICP算法的改進算法。點云配準優化問題,可以轉化為求取一個有6個自由度的剛體變換M(R,T),將兩片點云配準到同一坐標系下,使配準點云之間的距離誤差達到最小。ICP算法對初始點云對的對齊要求非常高。如果初始點云對未能對齊,將會使ICP算法陷入局部最優。初始點云對對齊,將減少迭代的次數,提高點云配準的速度和精度。
目前,求解位置變換矩陣的主要方法如下。Beltrami和Jordan提出的奇異值分值(singular value decomposition,SVD)[10]法,求解的變換矩陣精度高,但是需多次迭代,會影響點云配準的速度。文獻[11]對Horn[12]提出的四元素表示法進行了細致的描述。列文伯格-馬夸爾特法(Levenberg-Marquardt,LM)[13]算法能夠借助高斯-牛頓算法以及梯度下降法的優點,并對兩者的不足之處作了改善;但是其局部搜索耗時大,求得的變換矩陣精度不高。因此,本文提出了一種基于矩陣指數表示變換矩陣的點云配準方法,從而提高求取變換矩陣的速度和精度,以及ICP算法的收斂速度和計算精度。
1 算法描述
1.1 目標函數
如前文所述,點云配準優化問題,可以轉化為求取一個有6個自由度的剛體變換M(R,T),將2片點云配準到同一坐標系下,使配準點云之間的距離誤差達到最小。假設待配準點云集P={p1,p2,…,pi},1≤i≤n},Q={q1,q2,…,qi},1≤i≤m。其中:n、m分別為P和Q中點云的總數。用R表示旋轉變換矩陣,T表示平移變換向量,則ε(R,T)表示源點集Q在變換矩陣M(R,T)的作用下與目標點集P之間的誤差。因此,求解點云配準優化的問題就可以轉化為求解滿足 min[ε(R,T)]的最優解,可以定義為:
(1)
式中:qi為點云集Q中的一個點云數據;pi為點云集P中的一個數據點;R∈SO(3);T∈R3。
假如(pi,qi)為對齊的點云對,ni為它們之間單個點云的法向量,如需確定最佳的變換矩陣M(R,T),以實現點云集P和點云集Q配準,則可將式(1)變換為:
(2)
式中:ni為點云qi點的法向量;(piR+T-qi)為點云pi到點云qi的一種線性轉換;[(piR+T-qi)ni]2為piR+T點到qi平面距離的平方。
1.2 求解變換矩陣

(3)

(4)
由指數ex展開可知,當|x|<1時,ex≈1+x。所以,當坐標旋量‖ω‖<1時,式(4)可以表示為:
(5)
T=v
(6)
將式(5)和式(6)代入式(2),可得:
(7)

定義a=P×n,則式(2)可以重寫為:
(8)
要使式(8)有最小值,則要先求取函數ε(R,T)關于ω和v參數的偏導數。當偏導數為零,即可求出參數的值。求解偏導公式為:

(9)
將式(9)表示為Ax=b的線性矩陣方程。其中:A為6×6的協方差矩陣,可以用已知的ai和ni表示;x為6×1的未知向量;b為6×1的向量,可以通過對應的點云對(pi,qi)和ai和ni表示。求解Ax=b的線性矩陣方程,就可以得出旋轉矩陣R和平移向量T,即完成變換矩陣求解。從式(9)可知,求解變換矩陣只需要6個方程,算法易于實現,且不需要構造其他的模型函數。在LM算法中,需要構造模型函數f,并在其領域內對估計參數向量p作線性近似變換。如未能較好地構造模型函數構,將直接影響變換矩陣的求解。在SVD算法中,需要計算點云的質心,然后構造協方差矩陣。該方法計算量大,迭代次數多。從式(9)可以看出,本文方法很好地避免了上述兩種算法的不足,能夠快速、精確地求出變換矩陣。
1.3 點云配準
為了加快對點云對(pi,qi)最近點的搜索,采用K-D tree搜索法來尋求最近點,提高整體的點云配準速度。如前文所述,ICP算法對初始位置對齊的點云對依耐性較高。采用隨機采樣一致性算法(random sample consensus,RANSAC)[15]去除錯誤的點云,以減少計算迭代的次數,并結合本文算法來求出變換矩陣,完成點云配準。 具體的點云配準流程如圖1所示。

圖1 點云配準流程圖
2 試驗結果與分析
2.1 試驗評估及試驗環境說明
試驗從以下2個方面進行評估。
②在相同的條件下,分別與基于SVD算法的ICP算法和基于LM算法的ICP算法,比較配準的精度和配準的運行時間。
本文所有試驗的計算機配置為:AMD A8 2.1 GHz CPU、4 GB內存,WIN7 64位操作系統。點云配準方法采用C++語言在Visual 2010上編程實現,并調用PCL 1.7.2版本[16]的點云庫顯示和保存點云。
為了驗證本文方法的有效性,試驗中的點云數據采用斯坦福大學提供的Bunny、Happy和Dragon數據樣本。數據大小分別為:35 947個Bunny數據,32 328個Happy數據,22 998個Dragon數據。
2.2 配準的結果展示
2.2.1 Bunny配準結果
將Bunny的點云數據分別代入基于SVD算法、LM算法以及本文方法。3種算法各自迭代30次,Bunny點云配準的結果如圖2所示。
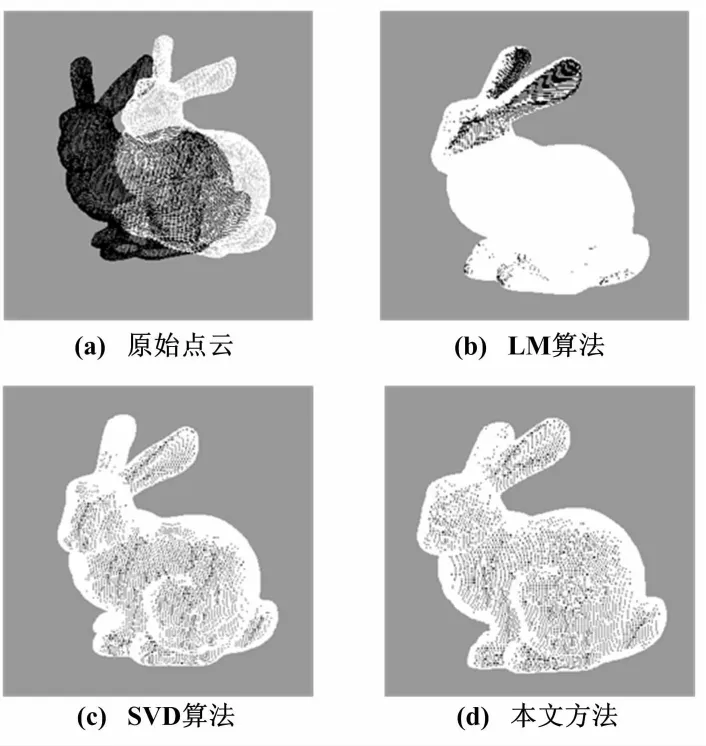
圖2 Bunny點云配準結果
從圖2可知,本文方法和SVD算法優于LM算法。在Bunny的耳朵處,LM算法配準得不是很好,出現大量的不配準點。為了客觀地表示Bunny點云配準的結果,分別對上面3種算法迭代不同的次數,比較其配準時間和配準精度,結果如表1所示。
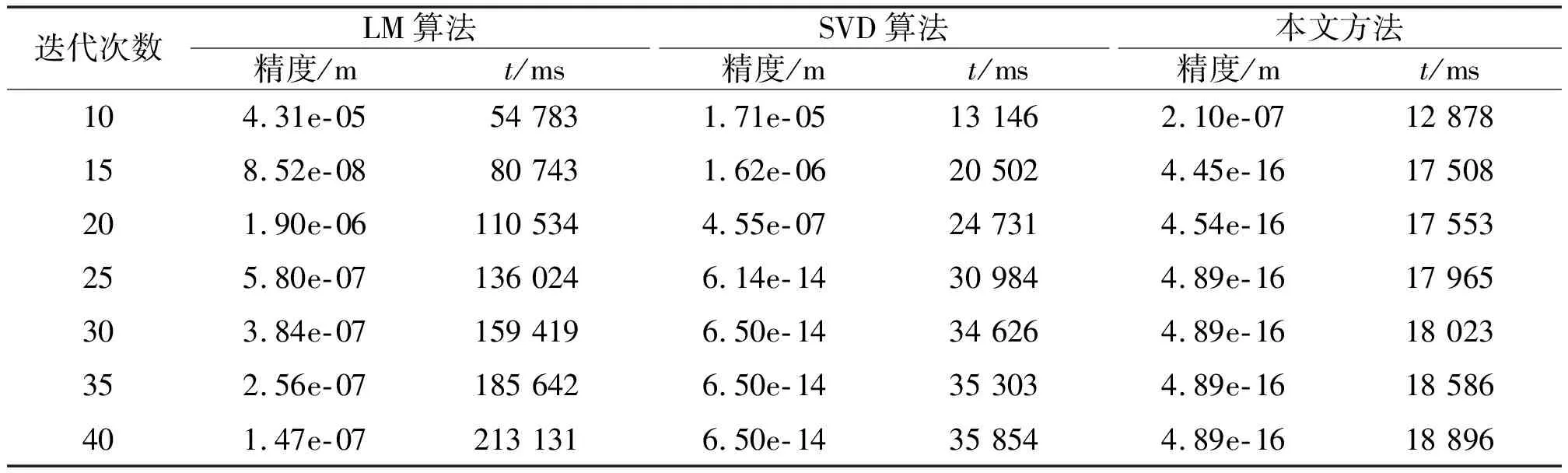
表1 Bunny點云配準精度和時間對比
從表1可以得出,本文方法配準精度和速度明顯優于LM算法和SVD算法。LM算法在迭代15次時配準精度出現最高,精度數量級達到10-8;在迭代20次時精度降低,然后隨著迭代次數的增加精度提高。SVD算法在迭代30次時達到局部最優,得到最佳的匹配,精度數量級達到10-14。本文方法在迭代15次時,精度數量級達就到10-16,明顯超過其他2種算法的最佳配準精度數量級。在3種算法分別迭代40次時,LM算法在速度上是最慢的,本文方法最快,所用時間是SVD算法所要時間的6倍、LM算法的11倍。很明顯,本文方法在速度上明顯優于其他2種算法。
2.2.2 Happy配準結果
將Happy的點云數據分別代入3種算法。3種算法各自迭代30次的配準結果如圖3所示。
由圖3可知,本文方法和LM算法優于SVD算法。SVD算法在Happy的上部分右邊處配準得不是很好。
同樣地,為了客觀表示Happy點云配準的結果,分別對3種算法迭代不同的次數,比較其配準時間和配準精度,結果如表2所示。

圖3 Happy點云配準結果

迭代次數LM算法精度/mt/msSVD算法精度/mt/ms本文方法精度/mt/ms103.56e-0646 9076.49e-0610 3132.10e-0710 098157.27e-0770 4423.13e-0617 4314.15e-1614 262202.48e-0797 3641.52e-0622 7884.84e-1614 689256.48e-09118 3567.15e-0728 1135.89e-1615 621301.27e-12141 5893.92e-0733 6566.87e-1615 789356.48e-16161 3703.37e-1439 3626.87e-1616 216408.90e-16167 4094.02e-1441 4416.87e-1616 542
由表2可知,LM算法從迭代初始次數時配準精度就高于SVD算法,在迭代40次時配準精度高于本文方法。但是,本文方法收斂速度仍然是3種算法中最快的。在迭代15次時,本文方法精度數量級達就到10-16、LM算法精度數量級為10-7、SVD算法精度數量級為10-6,證明本文方法配準精度遠高于其他2種算法。在配準時間上,LM算法總大于SVD算法和本文方法。LM算法迭代10次所花時間大于SVD算法迭代40次的時間,本文方法的配準時間仍然是最小的,明顯小于其他2種算法。
2.2.3 Dragon配準結果
將Dragon的點云數據分別代入3種SVD算法。3種算法各自迭代30次,Dragon點云配準結果如圖4所示。
從圖4可知,3種算法的配準效果都較好。同樣地,為了客觀表示Dragon點云配準的結果,分別采用上面3種算法迭代不同的次數,比較其配準時間和配準精度,結果如表3所示。
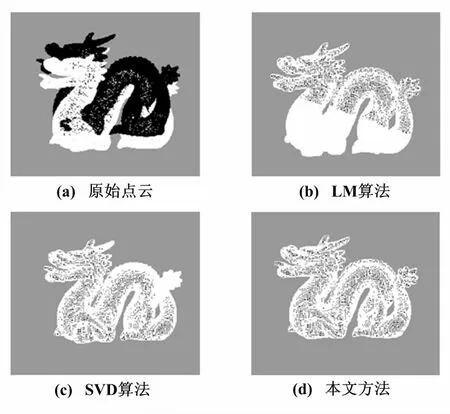
圖4 Dragon點云配準結果

迭代次數LM算法精度/mt/msSVD算法精度/mt/ms本文方法精度/mt/ms103.39e-0636 7763.17e-067 5935.10e-087 174152.81e-0654 5614.42e-0711 5563.36e-127 531209.13e-1169 8184.14e-1414 5353.76e-177 900257.96e-1183 0254.66e-1414 8533.76e-178 156307.61e-1195 7604.66e-1415 2303.76e-178 289357.33e-11111 3114.66e-1415 5493.76e-178 366407.06e-11124 1174.66e-1415 7423.76e-178 741
由表3可知,從精度上看,LM算法是3種算法中最差的一種,在迭代次數超過25次時收斂幾乎保持不變,在整過迭代過程中沒有出現局部最優值; SVD算法在迭代20次時超過LM算法,在迭代25次時出現局部最優值;本文方法在迭代20次時就出現局部最優值,得到最佳的配準結果,配準精度結果為10-17,在精度數量級上超過LM算法和SVD算法。從時間上看,本文方法在配準時間仍然最少的,SVD算法次之,LM算法最多。本文方法在配準精度和速度都好于其他兩種算法。
2.2.4 單片點云配準結果
在以上試驗中,分別比較了3種算法對完整點云數據的配準結果。為了驗證本文方法的普遍有效性,對單片非閉合的點云進行配準。數據采用了Bunny的頭部,點云數據量為23 317; Happy的底座,點云數據量為6 823; Dragon的右部分,點云數據量為12 414。分別采用3種算法對以上點云數據進行處理,各自迭代30次,單片點云配準結果如圖5所示。
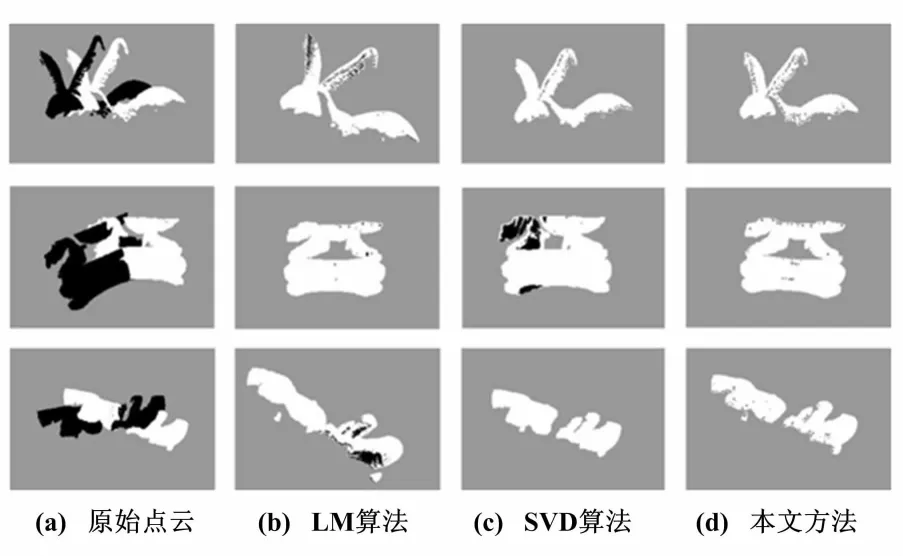
圖5 單片點云配準結果
由圖5可知,第1行中Bunny的頭部,3種算法配準精度無明顯的差別;第2行中Happy的底座,LM算法和本文方法明顯優于SVD算法;第3行中Dragon的右部分腿,LM算法比本文方法和SVD算法差。為了更加精確、直觀地描述3種算法的配準精度和速度,將3種算法各自迭代30次,結果如表4所示。

表4 單片點云配準精度和時間對比
由表4可知,在第1行Bunny中,LM算法在配準精度上要高于SVD算法,但時間上要遠大于SVD算法,本文方法在配準精度和時間上都要優于其他兩種算法;在第2行Happy中,SVD算法在配準精度和時間上都好于LM算法,本文方法是三者算法中最好的;在第3行Dragon中,LM算法在配準精度上高于SVD算法,本文方法遠超LM算法和SVD算法,還是三者中最好的。從總體上來看,本文方法對單片非閉合的點云配準精度最高,精度數量級達到10-17~10-16,與閉合的點云數據幾乎一致,其他2種算法在單片非閉合點云的配準上誤差較大,與閉合的點云數據相差較大。
3 結束語
點云配準是點云數據處理中最重要的一步,其關鍵在于求解位置變換矩陣。針對目前求解變換矩陣精度不高、耗時大的問題,提出一種新的求解變換矩陣的方法;結合K-D tree來加快最近點的搜索速度,并采用RANSAC剔除錯誤的點云,以減少迭代的次數,最終完成點云的配準。試驗結果表明,本文方法在配準精度和時間上優于LM算法和SVD算法。本文方法的精度數量級達到10-17~10-16,是其他兩種算法不可達到的,由此證明了本文方法的有效性和時效性。下一步將對點云數據有噪聲和點云密集程度大的情況開展研究工作。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
