四旋翼飛行器建模、仿真與PID控制
2018-11-22 02:23:44北京航空航天大學(xué)自動化科學(xué)與電氣工程學(xué)院陳聽雨
電子世界 2018年21期
關(guān)鍵詞:模型設(shè)計(jì)
北京航空航天大學(xué)自動化科學(xué)與電氣工程學(xué)院 陳聽雨
四旋翼是一種實(shí)用的無人飛行器。本文首先對四旋翼進(jìn)行了動力學(xué)分析,在其基礎(chǔ)上建立了四旋翼的數(shù)學(xué)模型。在對模型進(jìn)行化簡后,設(shè)計(jì)了飛行控制系統(tǒng),并將控制系統(tǒng)拆分為內(nèi)環(huán)姿態(tài)控制與外環(huán)位置控制,分別設(shè)計(jì)了PID控制率對其進(jìn)行控制。最后在Matlab/Simulink中搭建了完整的四旋翼飛行控制仿真模型,并對模型與控制率進(jìn)行了仿真驗(yàn)證。
1.引言
四旋翼飛行器是一種能實(shí)現(xiàn)垂直起降的非共軸式多旋翼飛行器(李俊,李運(yùn)堂.四旋翼飛行器的動力學(xué)建模及PID控制[J].遼寧工程技術(shù)大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,31(1):114-117)。小型四旋翼飛行器具有四個(gè)螺旋槳,并且螺旋槳呈十字交叉結(jié)構(gòu)的旋翼式飛行器,它通過調(diào)整四個(gè)電機(jī)的轉(zhuǎn)速來實(shí)現(xiàn)俯仰、橫滾、偏航等飛行動作,并具有可懸停、機(jī)動性好、結(jié)構(gòu)簡單等優(yōu)點(diǎn)(江杰,豈偉楠.四旋翼飛行器建模與PID控制器設(shè)計(jì)[J].電子設(shè)計(jì)工程,2013,21(23):147-150)。

圖1 四旋翼飛行器
與固定翼飛行器相比,四旋翼控制相對簡單,只需調(diào)節(jié)其四個(gè)旋翼轉(zhuǎn)速即可實(shí)現(xiàn)對四旋翼飛行姿態(tài)的控制。為使得四旋翼能夠按照設(shè)計(jì)的姿態(tài)與軌跡進(jìn)行飛行,必須首先對四旋翼進(jìn)行建模,然后根據(jù)得到的模型設(shè)計(jì)飛行控制系統(tǒng)并進(jìn)行仿真驗(yàn)證。因此,對四旋翼進(jìn)行建模,在此基礎(chǔ)之上設(shè)計(jì)合理的控制率,并進(jìn)行仿真驗(yàn)證是四旋翼實(shí)現(xiàn)各種姿態(tài)與路徑飛行的關(guān)鍵。目前,四旋翼的控制方法主要有反步控制、H∞控制與滑模控制等(王樹剛.四旋翼直升機(jī)控制問題研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006;聶博文.微小型四旋翼無人直升機(jī)建模及控制方法研究[D].長沙:國防科學(xué)技術(shù)大學(xué),2006;王麗新.基于滑模理論的四旋翼直升機(jī)的姿態(tài)控制研究[D].沈陽:東北大學(xué),2009)。
本文對通過對四旋翼進(jìn)行動力學(xué)分析,建立了四旋翼的動力學(xué)模型,并對其進(jìn)行了化簡。根據(jù)化簡的模型,使用PID控制方法設(shè)計(jì)了四旋翼飛行控制率,并在Matlab/Simulink中對其進(jìn)行了仿真驗(yàn)證。
本文共分為四個(gè)部分,第一部分對四旋翼與本文目的進(jìn)行了簡述,第二部分簡要介紹了四旋翼動力學(xué)建模與簡化的內(nèi)容,第三部分完成了對四旋翼模型的仿真、PID控制率設(shè)計(jì)與驗(yàn)證,第四部分對全文進(jìn)行了總結(jié),并提出了未來工作的重點(diǎn)方向。
2.四旋翼動力學(xué)建模與簡化
2.1 基本假設(shè)與坐標(biāo)系變換
正常情況下,四旋翼飛行器結(jié)構(gòu)呈X型。

圖2 四旋翼飛行器結(jié)構(gòu)
在為四旋翼建模之前,為簡化模型分析,抓住主要矛盾,忽略次要矛盾,提出以下七點(diǎn)假設(shè):
(1)四旋翼飛行器是剛體,在其飛行過程中質(zhì)量保持不變;
(2)地面坐標(biāo)系視為慣性坐標(biāo)系;
(3)地球表面是平的,且忽略地球自轉(zhuǎn)與公轉(zhuǎn);
(4)重力不隨高度變化而變化;
(5)四旋翼飛行器形狀與質(zhì)量是關(guān)于中心對稱的(吳森堂,費(fèi)玉華.飛行控制系統(tǒng)[M].北京:北京航空航天大學(xué)出版社,2005:46-47);
(6)四旋翼低速飛行時(shí)忽略空氣摩擦力;
(7)四旋翼進(jìn)行低速小角度飛行。
首先為四旋翼建立合適的坐標(biāo)系。
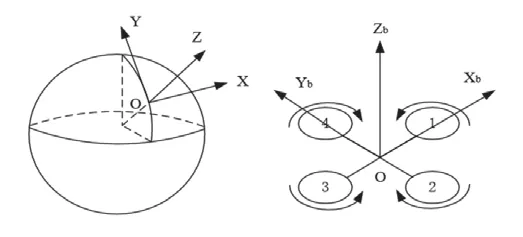
圖3 地面坐標(biāo)系與機(jī)體坐標(biāo)系
其中,地面坐標(biāo)系定義如下:選取地面上的一點(diǎn),即四旋翼至地球中心連線與地面的交點(diǎn),定義X軸指向水平正東方向,Y軸指向水平正北方向,Z軸垂直于XOY平面,指向天空,即與重力方向相反。
機(jī)體坐標(biāo)系定義如下:由于四旋翼在形狀上關(guān)于中心對稱,因此四條機(jī)臂是等價(jià)的。選取Xb軸指向其中一條機(jī)臂的方向,Yb軸指向逆時(shí)針轉(zhuǎn)過90°,與Xb軸垂直的另一條機(jī)臂的方向,Zb軸垂直于XOY平面,指向四旋翼飛行器上方。
為確定四旋翼姿態(tài),分別定義歐拉角如下。
●滾轉(zhuǎn)角φ:在YOZ平面的投影與OY的夾角
●俯仰角θ:在XOZ平面的投影與OZ的夾角
●偏航角ψ:在XOY 平面的投影與OX的夾角
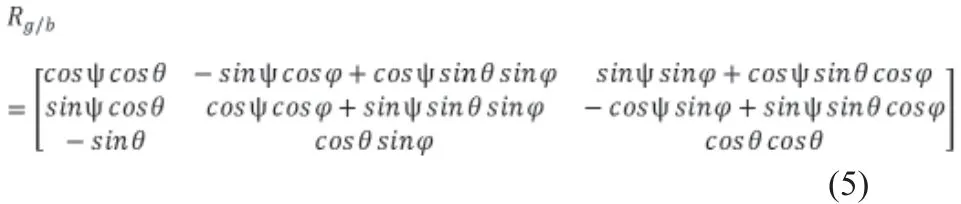
從機(jī)體坐標(biāo)系變換至地面坐標(biāo)系的轉(zhuǎn)換矩陣記作Rg/b,需要經(jīng)過三次歐拉旋轉(zhuǎn)獲得(許喆.四旋翼無人機(jī)控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].南京:南京理工大學(xué),2017):
首先,繞Zb轉(zhuǎn)動ψ角,變換至中間坐標(biāo)系A(chǔ),此變換矩陣記作RA/b。

之后,繞轉(zhuǎn)動θ角,變換至中間坐標(biāo)系B,此變換矩陣記作RB/A。

最后,繞轉(zhuǎn)動φ角,變換至地面坐標(biāo)系,此變換矩陣記作Rg/B。

可得由機(jī)體坐標(biāo)系變換至地面坐標(biāo)系的轉(zhuǎn)換矩陣Rg/b。
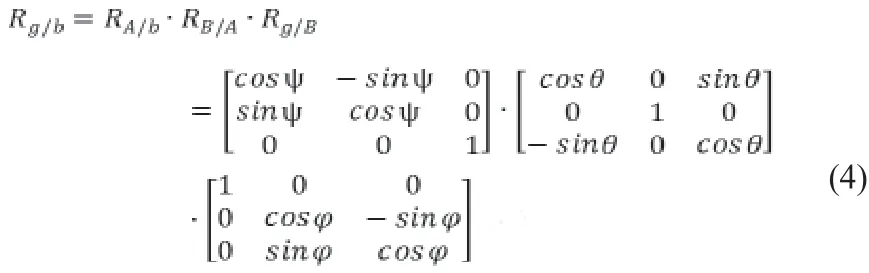
最終得到Rg/b。
2.2 四旋翼動力學(xué)建模
記四個(gè)旋翼的轉(zhuǎn)速分別為~,這也是實(shí)際的輸入的控制量。單個(gè)旋翼沿軸正方向的拉力可近似認(rèn)為與該旋翼轉(zhuǎn)速的平方成正比(米培良.四旋翼飛行器控制與實(shí)現(xiàn)[D].大連:大連理工大學(xué),2015)。

其中,f 為升力系數(shù)。
容易寫出四旋翼在地面坐標(biāo)系下受到的合力。


同理,可以寫出機(jī)體坐標(biāo)系下三個(gè)力矩平衡方程(馮培晏.四旋翼無人機(jī)建模與PID控制器設(shè)計(jì)[J].工業(yè)設(shè)計(jì),2018(6):135-137)。


其中,l為四旋翼機(jī)臂長,d為電機(jī)反扭矩系數(shù)。
可以寫出機(jī)體坐標(biāo)系下各軸角速度與四旋翼滾轉(zhuǎn)、俯仰、偏航角速度之間的關(guān)系。

根據(jù)前文假設(shè),本文研究的情況為四旋翼無人機(jī)小角度、低速度飛行,因此可以做如下近似。

即:

通過對進(jìn)行變換,令:
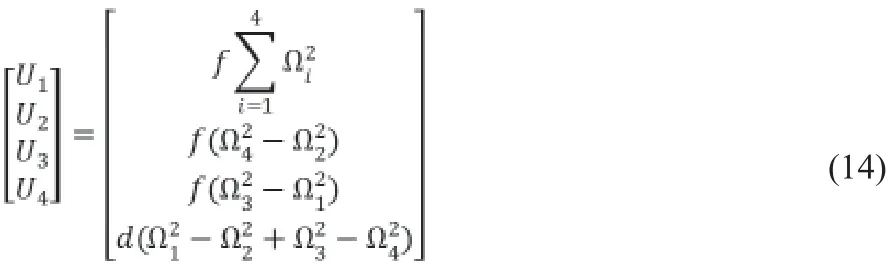
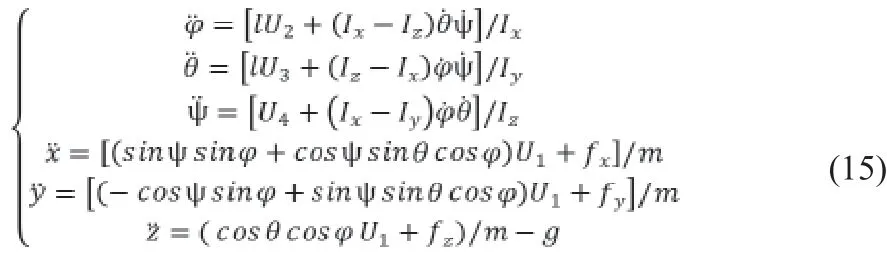
可得四旋翼飛行器最終模型。
3.四旋翼仿真與控制率設(shè)計(jì)
3.1 四旋翼模型仿真
根據(jù)查閱的文獻(xiàn)(李俊,李運(yùn)堂.四旋翼飛行器的動力學(xué)建模及PID控制[J].遼寧工程技術(shù)大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,31(1):114-117),得到四旋翼模型參數(shù)如表1所示。
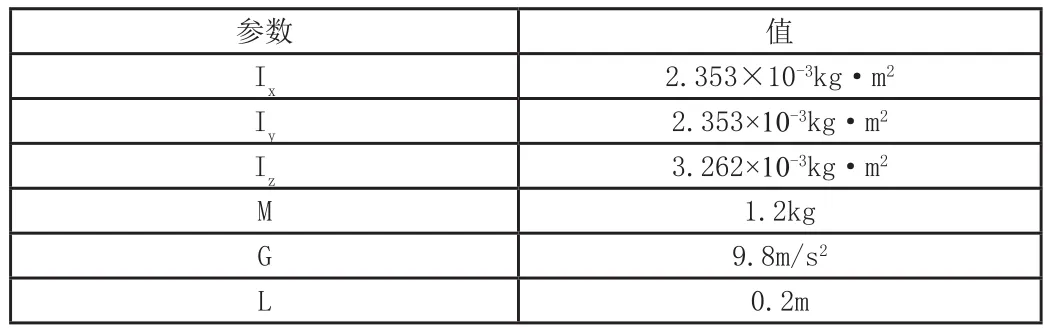
表1 四旋翼模型參數(shù)
四旋翼仿真使用Matlab/Simulink完成。仿真模型代碼如下:
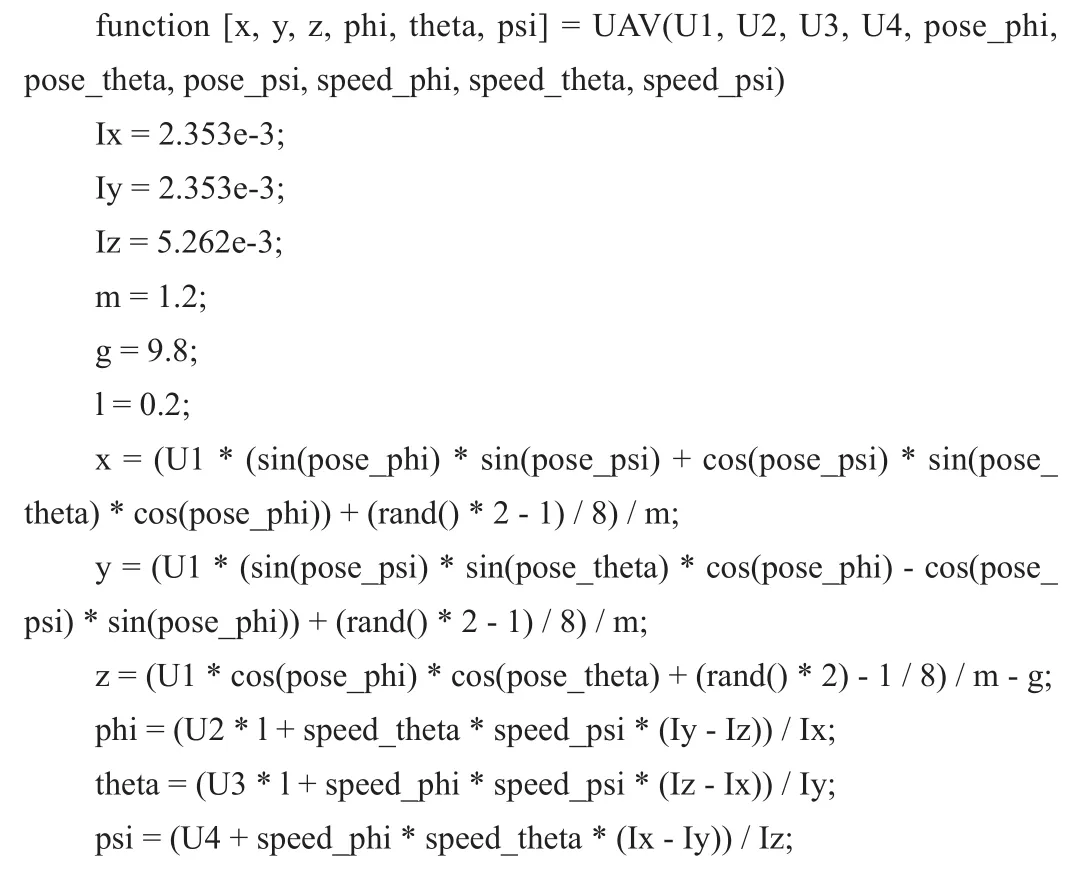
其中,使用rand()函數(shù),生成0~1之間的隨機(jī)數(shù),以模擬四旋翼受到的擾動。
3.2 四旋翼控制率設(shè)計(jì)
由四旋翼模型可以看出,其模型有四個(gè)輸入變量與六個(gè)輸出變量,屬于不完全控制,各變量之間相互之間存在耦合。
在設(shè)計(jì)控制率時(shí),首先對模型進(jìn)行化簡。由于本文假設(shè)四旋翼是在小角度、低速度的情況下進(jìn)行飛行,因此可以忽略陀螺效應(yīng)對三軸角速度帶來的影響(米培良.四旋翼飛行器控制與實(shí)現(xiàn)[D].大連:大連理工大學(xué),2015)。從而得到化簡后的模型。
觀察化簡后的四旋翼模型,可以發(fā)現(xiàn)其三個(gè)姿態(tài)角變量以及高度變量僅與四個(gè)輸入變量有關(guān),而X、Y軸位置的控制則同時(shí)與輸入以及姿態(tài)角有關(guān)(米培良.四旋翼飛行器控制與實(shí)現(xiàn)[D].大連:大連理工大學(xué),2015)。四旋翼飛行器的姿態(tài)與高度均完全可控。因此,將四旋翼模型拆分成兩個(gè)子控制系統(tǒng),內(nèi)環(huán)系統(tǒng)為姿態(tài)控制系統(tǒng),外環(huán)系統(tǒng)為位置控制系統(tǒng)。
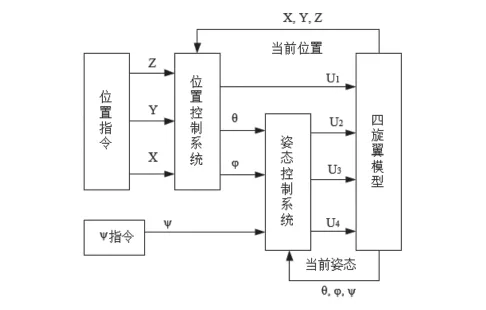
圖4 姿態(tài)角控制系統(tǒng)與位置控制系統(tǒng)
系統(tǒng)使用PID控制率進(jìn)行控制。PID是P(比例)算法與I(積分)算法與D(微分)算法三種算法各種組合的統(tǒng)稱。可以選擇為PD,PI,單獨(dú)的P算法等。P(比例)以減少系統(tǒng)穩(wěn)定性為前提減小系統(tǒng)誤差。I(積分)和D(微分)必須和P(比例)控制搭配使用,I(積分)反映系統(tǒng)的累計(jì)偏差,使系統(tǒng)消除穩(wěn)態(tài)誤差。D(微分)反映系統(tǒng)偏差信號的變化率,具有預(yù)見性,從而進(jìn)行超前控制(馮培晏.四旋翼無人機(jī)建模與PID控制器設(shè)計(jì)[J].工業(yè)設(shè)計(jì),2018(6):135-137)。
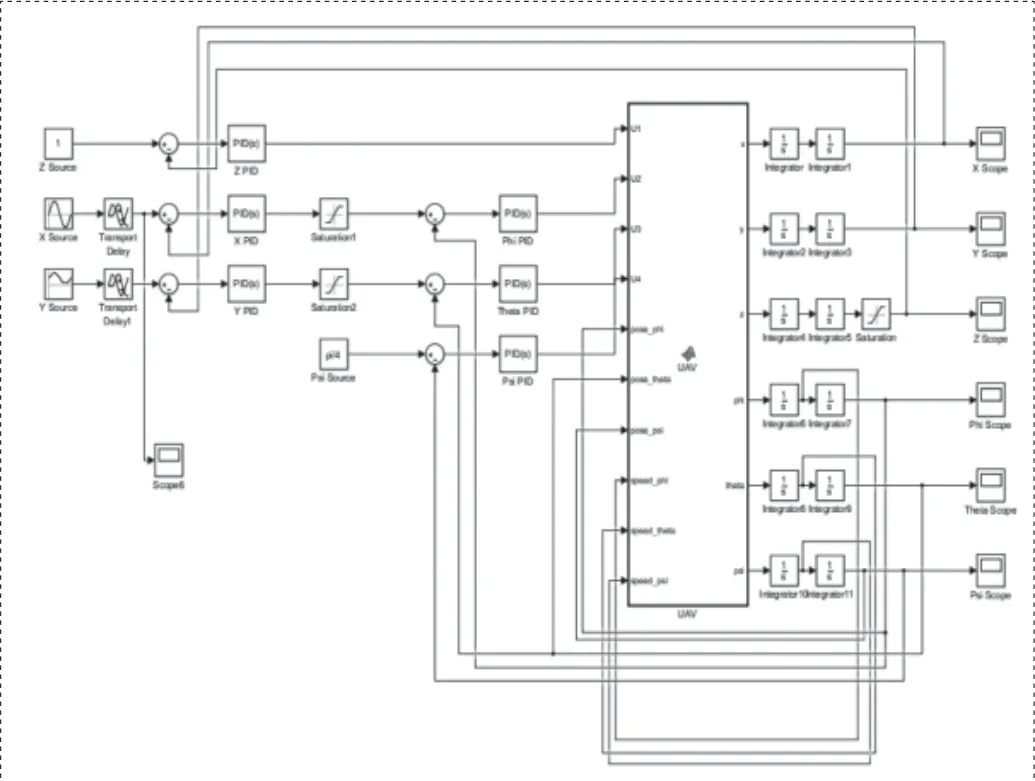
圖5 四旋翼控制系統(tǒng)仿真
從系統(tǒng)仿真框圖中可以明顯看出位置與姿態(tài)兩個(gè)相對獨(dú)立的字系統(tǒng)。X、Y位置指令首先輸入外環(huán)控制系統(tǒng),即位置控制系統(tǒng),其輸出作為內(nèi)環(huán)控制系統(tǒng),即姿態(tài)控制系統(tǒng)的輸入控制四旋翼的滾轉(zhuǎn)角與俯仰角。采用先調(diào)節(jié)內(nèi)環(huán),后調(diào)節(jié)外環(huán)的策略,調(diào)節(jié)系統(tǒng)各個(gè)PID的參數(shù)。最終結(jié)果如表2所示。
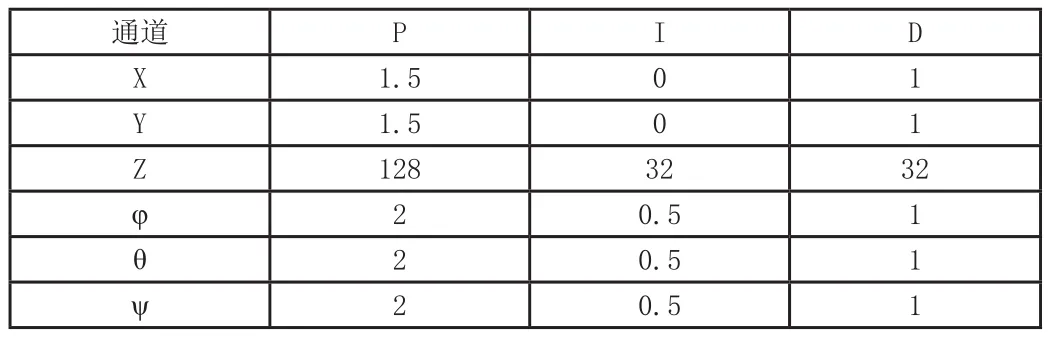
表2 四旋翼PID控制參數(shù)
3.3 四旋翼控制率驗(yàn)證
對控制系統(tǒng)進(jìn)行測試,令四旋翼在1米的高度按照半徑為2的圓軌跡進(jìn)行飛行,輸入如下控制指令。
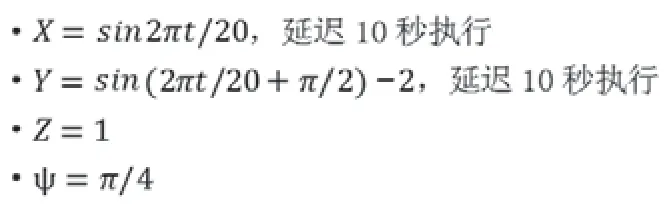
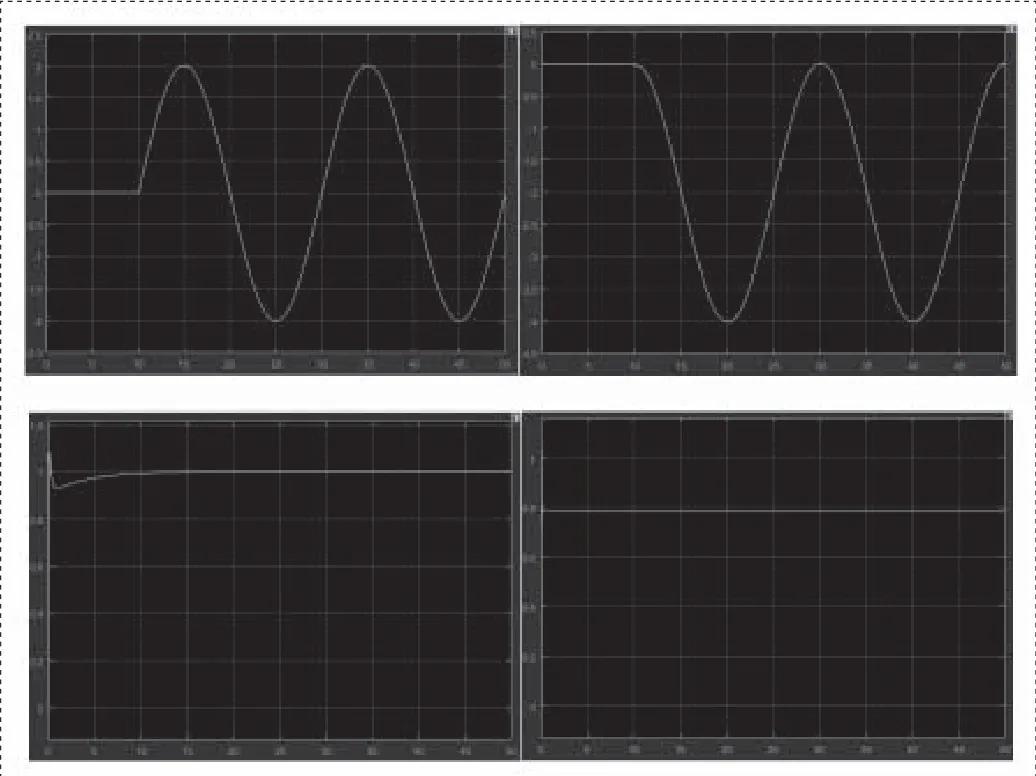
圖7 X、Y、Z與φ控制結(jié)果仿真
從結(jié)果可以看出,PID控制系統(tǒng)對于四旋翼飛行器有較好的控制效果,飛行器可以在具有擾動的情況下,根據(jù)指令按照設(shè)計(jì)的軌跡進(jìn)行飛行。
4.結(jié)語
本文首先對四旋翼飛行器進(jìn)行了簡介,之后對四旋翼進(jìn)行了建模,并對模型進(jìn)行了簡化,得到了適合控制使用的四旋翼動力學(xué)模型。根據(jù)得到的模型,本文對該模型進(jìn)行了仿真,并設(shè)計(jì)了PID控制率,使得飛行器能夠按照指令沿一定軌跡進(jìn)行飛行,并驗(yàn)證了控制率的正確性。
然而,本文的模型與控制率設(shè)計(jì)仍然存在不足。對比真實(shí)的四旋翼模型,本文的模型過于簡單,并沒有考慮到許多實(shí)際中可能出現(xiàn)的影響因素,如空氣阻力等。同時(shí),本文的PID控制率也不適用于在復(fù)雜的實(shí)際條件下進(jìn)行飛行。未來的工作將會重點(diǎn)集中于對四旋翼進(jìn)行精確建模,并采取更加先進(jìn)的控制方法以實(shí)現(xiàn)對四旋翼飛行更好的控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03