交流調速矢量控制策略
2018-11-22 02:23:48北京昊華能源股份有限公司安全監察部李德臣
電子世界 2018年21期
關鍵詞:交流
北京昊華能源股份有限公司安全監察部 李德臣
0 引言
交流感應電機由于其固有的良好魯棒性還有其形成的可靠驅動部件,在工業生產中成為比較常用的一種電機。三相交流感應電機具備多種優勢,如成本較低,結構簡單、運行穩定、易于使用、維護方便等,因此研究三相交流感應電機控制策略有著重要的意義。
矢量控制基本思想是通過靜止和旋轉坐標系變換,在按轉子磁鏈定向同步旋轉正交坐標系中,得到直流電動機的等效模型,這樣矢量調速系統就相當于直流調速系統。于是矢量控制的交流變壓變頻調速系統在動態和靜態性能上可以同直流調速系統達到相同的控制效果。
本文利用矢量控制策略對交流電機進行控制,并在Simulink中建立仿真,驗證了建模和控制策略的可行性與有效性。
1 矢量控制原理
以形成相等旋轉磁動勢作為目標,三相靜止坐標系下的定子電流iA、iB、iC通過3/2(Clarke)變換,便可以轉化成兩相靜止坐標系里交流電流iα,iβ,再以轉子磁場定向的Park變換,可以轉換成旋轉坐標系里的直流電流im、it。假若參考方向為坐標系和鐵芯同時旋轉,交流電機就可以看成一臺直流電機。所以通過控制,便可以將交流電機的轉子磁通看作是直流電機的勵磁磁通,則M繞組看作是直流電動機的勵磁繞組,im看作是勵磁電流,T繞組看作是靜止的電樞繞組,it看作是與轉矩成正比的電樞電流。
圖1是上面所述的等效關系結構圖。從輸入輸出來看,輸入是iA、iB、iC三相電流,輸出是轉速ω的三相交流電機。以局部來觀察,經過3/2變換和旋轉變換,則可以看成輸入為im和it,輸出為ω的直流電機。

圖1 異步電動機的坐標變換結構圖
由于三相交流感應電機通過坐標變換過后可以看作是直流電機,這樣的話便可以使用直流電機的控制策略,從而得到直流電機相關控制量,再將這些控制量通過旋轉到三相靜止坐標反變換,于是便可以控制交流感應電機了。因為進行坐標變換的是空間矢量,所以這種使用坐標變換實現的控制系統就叫作矢量控制(Vector Control)。
2 按轉子磁鏈(磁通)定向的數學模型
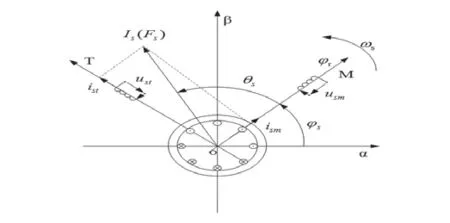
圖2 按轉子磁場定向的物理模型
2.1 電壓方程

異步電動機在MT同步旋轉坐標系上的電壓方程為:
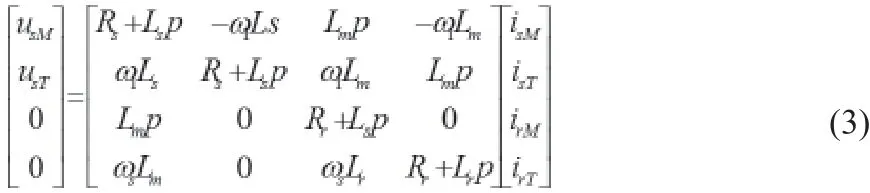
式(3)是由轉子磁鏈軸線定向的旋轉坐標系下的電壓方程,稱為磁場定向方程式,約束條件為。根據上述電壓方程能夠建立矢量控制系統所依據的控制方程。
2.2 轉矩方程
三相異步電機在旋轉坐標系下的轉矩方程為:

式(4)能夠看出,在旋轉坐標系下,假若按照異步電機轉子磁鏈定向,就會有異步電機電磁轉矩數學模型就和直流電機電磁轉矩數學模型相同。
2.3 按轉子磁鏈(磁通)定向的控制方程
在動態模型分析過程中,對同步旋轉坐標進行變換時,只對d、q軸的相互垂直關系和定子頻率同步的旋轉速度進行規定,并沒有對兩軸和電機旋轉磁場的相對位置進行規定。假若使d軸和轉子總磁鏈矢量方向一致,記作M軸,這時q軸相當于是逆時針轉90°,即垂直于矢量,記作T軸,由此得到的兩相同步旋轉坐標系就記作M、T坐標系,也稱之為按轉子磁鏈定向的旋轉坐標系。
旋轉角速度與轉子之差定義為轉差角頻率為:

轉子磁鏈的表達式為:

由式(6)看出,轉子磁鏈僅與定子電流勵磁分量ism相關,和轉矩分量不相關,由此可以看成定子電流的勵磁分量與轉矩分量是解耦的。
式(6)同樣能夠看出,與之間的關系為一階慣性傳遞函數,式中的是轉子磁鏈勵磁時間常數,假若勵磁電流分量變化時,同樣會受到勵磁慣性的影響,這種影響和直流電機的勵磁繞組的慣性作用相似。
2.4 在磁場取向上二相旋轉坐標系的轉子磁鏈觀測器
定子電流iA、iB、iC經Clarke變換形成兩相靜止坐標系下的電流isα和isβ,然后經旋轉變換并按轉子磁鏈定向形成m、t坐標系下的電流和,利用方程式(5)和(6)求得和ωs,再讓ωs與實際轉速ω求和得出定子頻率ω1,然后再積分得到轉子磁鏈的相位角?,即為旋轉變換的旋轉相位角。這種方法適合用于數字處理器的計算,收斂性好,準確度較高。

圖3 旋轉坐標系下轉子磁鏈的電流模型
3 異步電動機矢量控制系統
按照圖4控制系統結構建立仿真模型,由于磁鏈對控制目標的影響相當于一種擾動,轉矩內環的作用能夠抑制這個擾動,所以轉矩內環有助于解耦,因此改造轉速子系統,使其盡量不受到磁鏈變化的影響。轉速調節器ASR的輸出用于轉矩信號的指令,弱磁時它也受到指令磁鏈信號的控制。
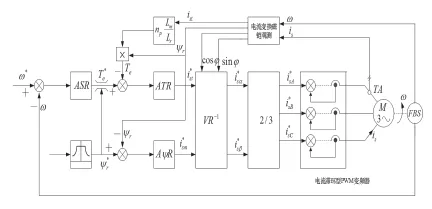
圖4 轉速磁鏈閉環(帶轉矩內環)矢量控制系統

圖5 異步電機MATLAB仿真圖
4 異步電機矢量控制MATLAB仿真
電機的參數設置為:電動機380V、50Hz、二對極,Rs=0.435Ω,Lls=0.002mH,Rr=0.816Ω,Llr=0.002mH,Lm=0.069mH,J=0,19kg●m2。逆變器直流電源為510V。
圖5所示是MATLAB仿真。
仿真結果如圖6-7所示。
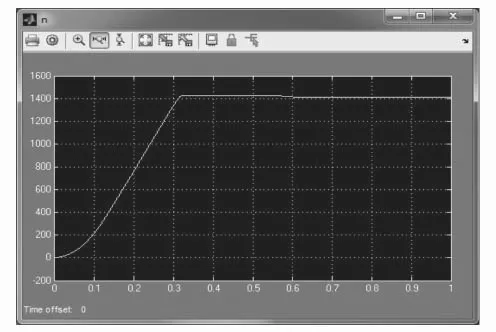
圖6 轉速n
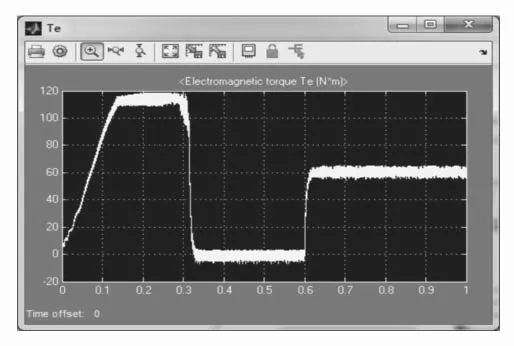
圖7 轉矩Te
5 結論
本文參考相關文獻后建立交流異步電機矢量控制系統的數學模型,然后搭建SIMULINK仿真模型,驗證了本文所提控制策略的正確性和有效性。合理的選取調節器參數和其他控制參數后,進行仿真實驗。系統仿真實驗結果表明:該系統得具有良好的動態性能,即系統的動態響應快,超調量小,抗干擾能力強,對給定的指令值具有良好的動態跟蹤能力,使電機獲得了較好的調速性能,達到了所提控制策略的預期效果。
參考:李德華,交流調速控制系統:電子工業出版社,2003;李永東,交流電機數字控制系統:機械工業出版社,2002;馬小亮,高性能變頻調速及其典型控制系統:機械工業出版社,2010;阮毅,陳伯時,電力拖動自動控制系統——運動控制系統:機械工業出版社,2013;邢紹邦,現代交流調速系統中的磁鏈觀測與SVPWM技術研究:青島大學,2007;楊夢晗,交流感應電機矢量控制及MATLAB仿真:吉林大學,2014;朱佳,基于DSP的三相交流電機的矢量控制系統的理論研究及仿真:武漢理工大學,2009;賈瑞,康錦萍,基于Matlab/Simulink的異步電機矢量控制系統仿真:華北電力技術,2011;韓會山,陳龍,程德芳,異步電機矢量控制系統的設計及仿真研究:計算機仿真,2012。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58