自動化系統中ADS-B報文與數據引接分析
2018-11-22 02:23:54民航青海空管分局馬安恒
電子世界 2018年21期
民航青海空管分局 馬安恒
引言:隨著航班量的迅猛增長,管制方式由雷達管制逐步向以衛星導航為基礎的新航行系統過渡。ADS-B技術在新航行系統中以高精度、高更新率為空管自動化系統提供了雷達數據的更好補充,更為洋區、極地航路、山區等地勢復雜地區提供了類雷達數據,有效的實現了飛行數據的可靠性、連續性、與準確性。
本文在對ADS-B技術原理分析的基礎上,進行其報文數據分析解析,并對在空管自動化中實現該數據的多雷達融合的數據進行評估,針對當前ADS-B數據與自動化系統對接的實現接入方式進行了探討;從而實現對目標飛機的高精度實時監視中的應用,為該系統進行深度研究提供了相關參考。
一、空管自動化系統技術原理
空管自動化系統是民航空管部門實施管制指揮的核心系統,通過處理雷達、ADS-B、多點定位、場面監視等監視數據,為管制員提供各種飛行沖突、飛行動態顯示和各種異常的告警,通過動態電報與監視數據相關處理、處理飛行計劃,使得管制員跟蹤、判斷機場場面動目標位置和空中航空器,獲取監視目標識別信息,航空器意圖和飛行軌跡、航空器監視機場場面運行態勢和間隔,提高空中交通安全的保障能力。對不同類型的監視采用不同的手段監視,ADS-B是空中交通監視應用的一種,用于傳遞飛行參數,比如,位置,航跡和地速等,通過數據鏈廣播模式,在特定的間隔時間內發送,任何空地用戶都可以申請使用這個功能。
利用機載ADS-B導航系統得到航空器的速度位置等精確信息,周期性地廣播航空器的呼號、位置、高度、速度和其他一些參數。地空數據鏈將這些信息傳輸至地面站,管制中心接收經過處理后的相關數據從而進行地空監視;具有接收ADS-B信息能力的航空器也可以通過機載電子設備接收附件航空器的ADS-B廣播信息,實現空空監視。ADS-B地面站將接收的信號轉換為標準的CAT021目標報告輸出目標報告經過路由傳輸、分發、信號轉換傳輸至ADS-C(FANS1/A)、空管自動化(ATC)系統目標報告、雷達數據融合,在顯示系統中以位置符號的形式跟蹤監視飛行。
二、ADS-B工作原理及報文解析
將主要來自GNSS和其他導航系統的ADS-B信息,以一定的周期通過機載發射機發送航空器的各種信息,包括:航空器速度、識別信息(ID)、方向、高度、位置和爬升率等。GNSS系統是ADS-B發送的航空器水平位置信號源,氣壓高度表是高度的信號源。機載設備發送的ADS-B 機載發射機信息通過地面站進行接收,類似于雷達的作用進行監視空中交通狀況。
ADS-B的信息傳輸到自動化系統,傳輸信息的格式是ASTERIX CAT 21,采用1090ES數據鏈,其民航廣播報文的數據格式是DF17和DF18。導航系統精度和延遲時間是確定ADS-B的監視精度的兩個重要因素。對于符合DO-303/ED-126中規定的ADS-B監視數據最低發送要求的內容應包括:水平位置,水平位置完好性,唯一的24位ICAO航空器地址碼,航空器識別碼,特殊位置識別碼,氣壓高度,應急狀態和應急指示與版本號。ADS-B報文解析框架如圖1所示。

圖1 ADS-B報文解析框架
ADS-B報文數據項以及其組成序列在歐控監視數據交換標準文檔進行了明確的規定,并詳細描述各個數據項的數據內容以及適用范圍等。Cat021報文數據包組成含有包類型、長度、字段描述符合一系列數據項,它是由十六進制數據串組成。報文解析示例:15 00 2F D1 19 21 59 01 18 FF D5 FE FF 78 09 00 1A 3A 02 00 00 7F 90 02 64 0F 80 01 99 40 33 0F C8 30 09 99 00 00 00 00 00 00 00 以上數據均以十六進制方式顯示。部分字段解析:15:報文幀頭,固定為15;00 2F:報文長度 LEN由兩個字節組成報文數據字節數;該報文長度為0x00*256+0x2F=0x2F =47個字節;D1 19 63 41 01 18:FSPEC字段,該字段可變,為 Asterix Category 021。
三、ADS-B數據信息評估與引接
對丟失數據進行預測、插補以及錯誤數據進行修正是ADS-B信息處理的關鍵。其最終形成好的航跡,主要內容有數據處理及其算法,位置信息的提取。飛機的離散位置報告點連接形成飛機的運行軌跡。而ADS信息處理的核心就是航跡處理。
1、ADS-B數據信息評估
監視處理子系統在自動化系統中可對多種信號源數據預處理,航跡融合處理,但是由于位置格式不同,時間不同,監視精度、更新率等不同,在管制席位屏幕上同時顯示時,飛機點跡會出現不同,同一目標甚至出現不同的航跡。因此在監視處理子系統中首先要對數據進行時基校準、格式轉換、坐標變換,將多個信號源的數據變換為統一的坐標系下。之后通過航跡非初始化區域處理,航跡關聯、跟蹤、融合,高度跟蹤及突變處理,QNH修正等處理,從而生產平滑、可靠的目標航跡提供給管制人員使用。圖2為ADS-B數據可靠性評估。
2、ADS-B數據引接方案
由于現在各地空管自動化系統型號種類多、跨度大,地面站輸出的數據格式和自動化系統的處理機制或融合算法不匹配的情況下,數據站可以自動化系統支持的ASTERIX CAT021等接口類型提供數據服務,接入方式根據自動化的情況可做選擇以ADS-B數據格式的同步方式引接或以ADS-B數據格式的IP方式引接。
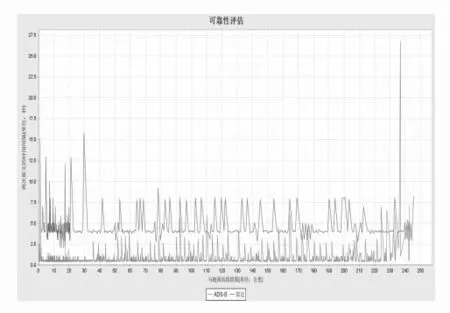
圖2 ADS-B可靠性評估
針對自動化系統處理版本不同的ADS-B數據時有不同版本數據的輸出,而由于自動化系統中處理ADS-B監視數據的系統以同步方式接入,將ADS-B監視數據輸出直接接入到自動化系統,因此,可以按照不同版本的數據格式、同步輸入(或IP輸入)的方式接入自動化系統中,接入結構圖如3所示。
以HDLC同步方式引接ADS-B數據,使得ADS-B二級數據中心與數據站之間的連接從鏈路上斷開,對自動化系統網絡安全進行了保證;而以IP方式引接,需要考慮利用防火墻進行網絡的隔離,對自動化系統進行網絡安全保證;同時此兩種方式具有最大傳輸速率限制,有效防止了網絡風暴。
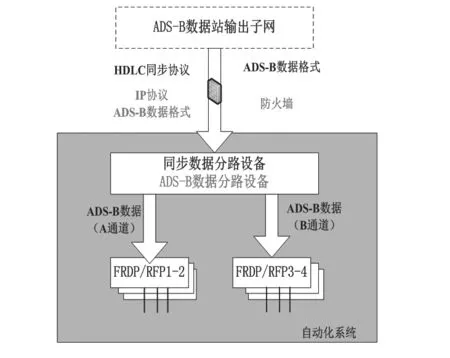
圖3 HDLC方式(黑色)或IP方式(紅色)引接
四、結束語
隨著空管新技術的日益完善和成熟,ADS-B以其基礎投入低、數據精度高、刷新率快等優點,在場區、洋區、極地航路等區域廣泛使用;目前,我國ADS-B建設尚在進行之中,相應ADS-B管制規章尚在制定完善之中,因此,在引接應用中需要盡快完善相應管制規章,并針對自動化配置情況,要求ADS-B的數據必須具備可選的多數據格式;同時對自動化系統進行升級以支持ADS-B數據的融合處理,以可靠的接入方式引接,從而達到無縫對接;未來以PBN、PBCS、多雷達、ADS-B、多點定位等技術相融合的自動化系統將極大的提高空管監視水平,為管制部門提供更加實時可靠的技術保障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32