仿人智能PID數學特性及在應用中的仿真
2018-11-22 02:23:56海軍工程大學
電子世界 2018年21期
關鍵詞:智能
海軍工程大學 張 楊
船控手操盒是一種嵌入式終端設備,體積小、功耗低,更能滿足特種船舶的作業要求。針對船舶動力定位控制的需求,采用仿人智能PID算法設計控制器實現該手操盒對船舶艏向的控制。
1 引言
本文主要討論了智能PID的模糊控制規則進行函數轉化,并在手操盒中模擬仿真,對動力定位技術的開發具有深遠的意義。
2 仿人智能PID數學設計與特性
在一般PID控制器中,我們設定常參數為kp、ki、kd。設定e為誤差、為誤差變化率,則kp、ki、kd與它們的關系式為公式1:

偏差其權重的變化與偏差的變化正相關,兩者要么同增大,要么同減小。而偏差變化率其權重的變化與偏差負相關,偏差增大時,偏差變化率的權重減小,反之則反之。誤差e和誤差變化率與權重的關系如下(公式2):

以上函數變化曲線形狀如圖1所示:
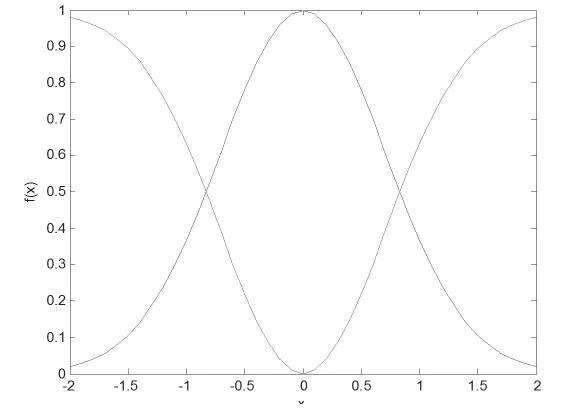
圖1 誤差和誤差變化率權重函數曲線
上面的關系式中k11、k12、k21、k22、k31、k32為比例因子,它們決定了曲線幅度;b11、b12、b21、b22、b31、b32為權重因子,它們決定了曲線的寬度,它們越大,曲線就越向左右延伸,可以通過改變b11、b12、b21、b22、b31、b32值來小幅度的調整e和在關系式中權重。
3 PID在船控手操盒中的仿真
先把船控手操盒及PID硬件電路準備好,寫入程序,為了能更準確地對船體動力定位實施有效控制,我們在以上基礎上加入動力定位控制功能。利用電腦軟件設計出一個船體模型,將手操盒與電腦利用以太網進行連接,實現硬件間的數據傳輸;最后運行手操盒中基于Linux操作系統下在ARM處理器上預先寫入的PID控制程序。
我們利用Matlab軟件分別對此船控手操盒在有環境干擾和無環境干擾下進行仿真試驗。利用寫入PID控制算法的手操盒將船舶艏向控制到10°時的控制曲線分別如圖2和圖3。
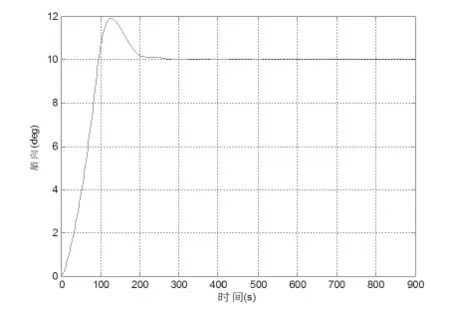
圖2 無環境干擾時仿人智能PID控制艏向圖
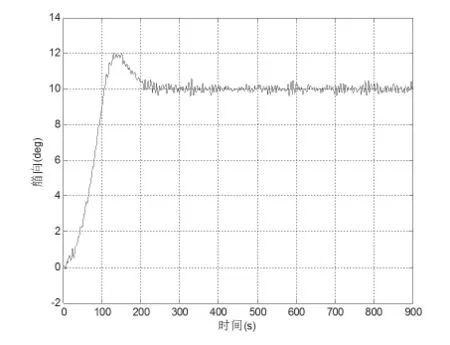
圖3 有環境干擾時仿人智能PID控制艏向圖
從無干擾環境下的仿真曲線圖可以看出,電腦中船舶模型的艏向值在智能PID控制器的操控下很快達到穩定狀態,超調量很小,誤差也滿足實際使用要求。在加入海洋環境干擾這一條件后,艏向值會 出現波動,因為使用了智能PID控制器進行控制,船舶模型的艏向值在10°左右波動,即使出現較大艏向值波動,也能很快恢復到設定值,也滿足設計要求,這與所設計的仿人智能PID控制器在線調節功能是分不開的。
通過這兩組實驗,可以看出所設計的手操盒具有較強的穩定性,仿人智能PID控制器也具有優良的在線調節功能,二者完美的結合可以讓動力定位手操盒具有良好的控制性能。
4 結語
本文主要針對船體定位系統的需要,結合所設計的仿人智能PID數學模型,驗證了在手操盒中的仿真效果。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44