基于內(nèi)外透鏡組合的LED后霧燈設(shè)計
2018-11-23 05:34:36樂能友石智偉史新剛
照明工程學(xué)報 2018年5期
樂能友,石智偉,史新剛
(1.廣東工業(yè)大學(xué)機電工程學(xué)院,廣東 廣州 510640;2.法雷奧照明佛山技術(shù)中心,廣東 佛山 528000)
引言
在汽車照明系統(tǒng)中,后霧燈是一種非常重要的信號燈,主要用于雨霧天氣行車時道路照明與安全警示。當(dāng)前大部分汽車后霧燈都還是傳統(tǒng)的結(jié)構(gòu)設(shè)計,一般由燈泡和拋物面型反射面組合而成。這種燈具體積較大,效率一般只在5%~7%,并且燈泡的光通量和發(fā)光角度較大,會導(dǎo)致路照有明顯的眩光亮斑,影響駕駛員的行車安全。
LED光源,具有體積小,響應(yīng)快,效率高,色域范圍廣等諸多優(yōu)點,是一種節(jié)能環(huán)保的新型光源[1]。目前部分后霧燈的設(shè)計已經(jīng)采用LED光源和非成像透鏡組合,從而提高了效率,降低了眩光。舒浙偉等利用菲涅爾透鏡和自由曲面組合設(shè)計后霧燈[2],其反射腔為基于拋物面的自由曲面,菲涅爾透鏡作為外透鏡,二者組合為后霧燈模組。這種方法雖然具有較高的工作效率,但是菲涅爾透鏡的設(shè)計較為復(fù)雜,其加工精度要求也較高,這無疑會增加整個燈具的生產(chǎn)成本。謝望等[3]則提出另外一種LED 汽車后霧燈模塊組設(shè)計,這種模組設(shè)計是利用拋物面和聚光器等不同組合的結(jié)構(gòu)來對汽車后霧燈進行配光設(shè)計。這種模組具有較高的生產(chǎn)效率,但這些模組結(jié)構(gòu)較為單一,且光源的效率不佳。蔣蕩華等[4]提出了激光光源應(yīng)用在汽車后霧燈中,激光盡管單色性好,穿透力強,但是激光相對于LED發(fā)熱更大,并且提高了生產(chǎn)成本,所以激光汽車后霧燈還停留在理論中。
目前針對后霧燈的研究設(shè)計方法較多,但各有優(yōu)缺點[5]。基于此,本文提出一種基于內(nèi)外透鏡組合LED后霧燈的設(shè)計。內(nèi)透鏡為提高效率的準(zhǔn)直透鏡,而外透鏡則為實現(xiàn)照明均勻化的自由曲面透鏡,所以兩者組合而成的后霧燈不僅具有較高的效率,而且照明分布均勻。因其結(jié)構(gòu)緊湊,設(shè)計簡單,其生產(chǎn)成本也大大降低,實用性較強。
1 內(nèi)透鏡設(shè)計
針對LED芯片的出射光呈余弦輻射分布的特點[6-9],本文采用了一種反射-折射復(fù)合型結(jié)構(gòu)的準(zhǔn)直透鏡作為內(nèi)透鏡,對LED芯片出射的光線進行準(zhǔn)直,提高了光源的效率。


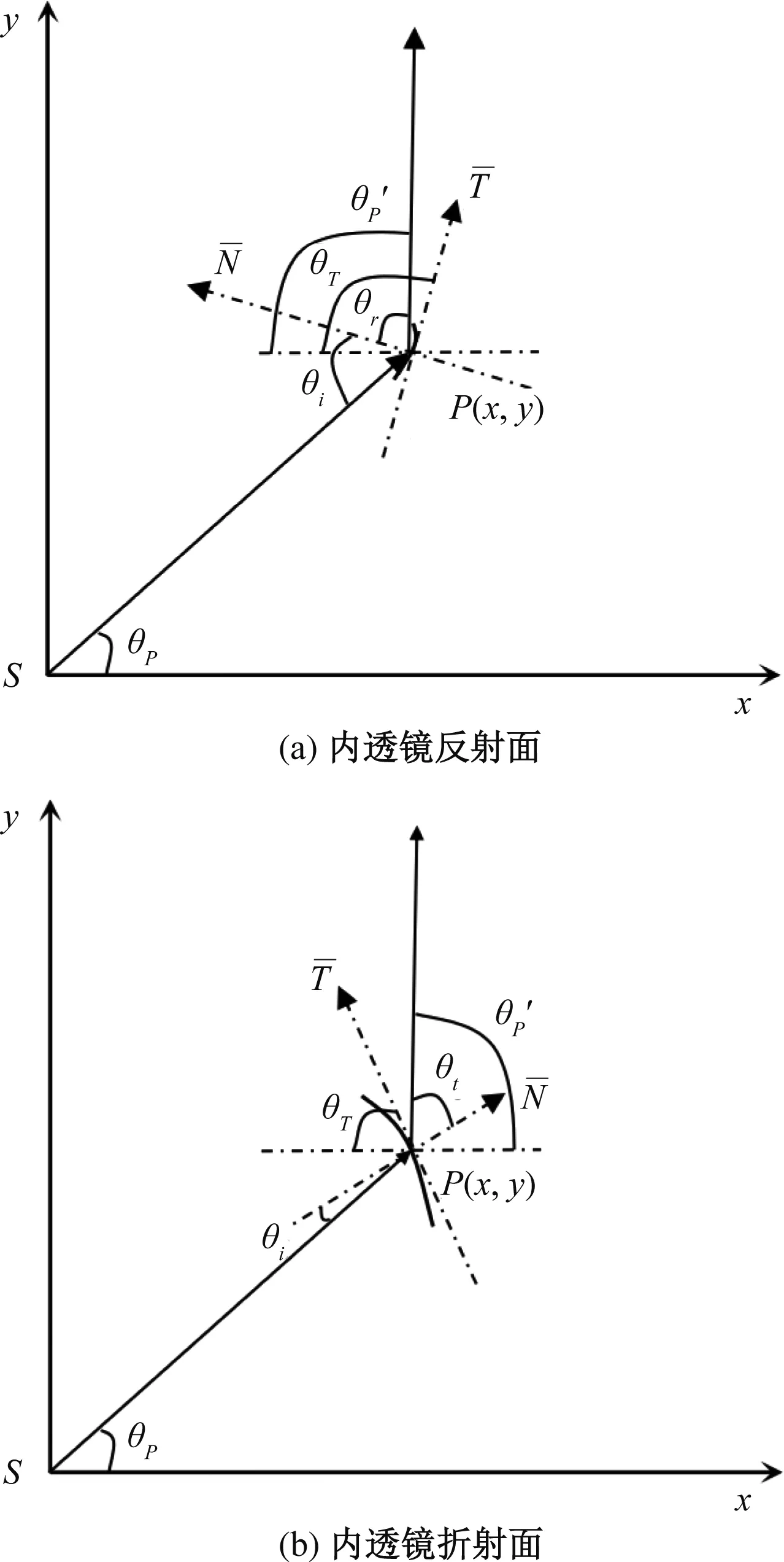
圖1 內(nèi)透鏡反射面與折射面的設(shè)計原理Fig.1 The design principal of the reflective surface and refractive surface of inner lens
給定一個初始點坐標(biāo)(0,r),利用歐拉法對微分方程(1)進行迭代求解[10-13],即可得到反射曲線上的離散點,并將這些離散點擬合成自由曲線。其中初始點中r值的大小可以根據(jù)實際需要進行設(shè)定。

(2)
如果給定一個初始點坐標(biāo)(h,0),類似反射曲線,我們可得到折射曲線。
3)反射面和折射面組合。利用MATLAB軟件對上述設(shè)計方法進行編程實現(xiàn)[16],獲得反射曲線和折射曲線組合的自由曲線[如圖2(a)所示],然后將該曲線作為母線導(dǎo)入三維軟件CATIA中,旋轉(zhuǎn)即可得到準(zhǔn)直透鏡,其三維模型如圖2(b)所示,高度為10 mm,底面半徑為5 mm。最后,將該透鏡作為單元進行十字形陣列排列,形成后霧燈的內(nèi)透鏡。
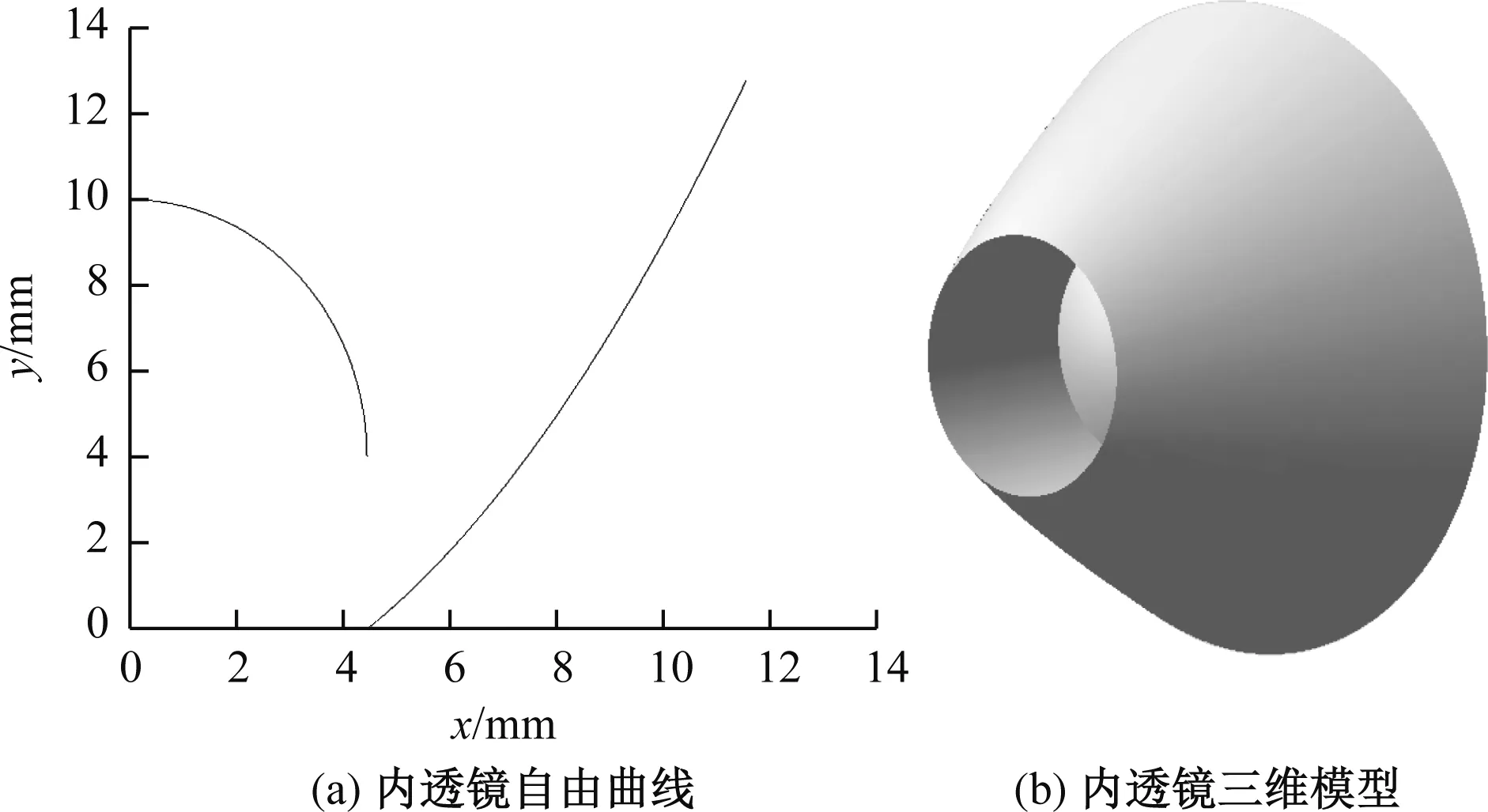
圖2 內(nèi)透鏡的自由曲線與三維模型Fig.2 Free curve and 3D model of inner lens
2 外透鏡設(shè)計
為了滿足后霧燈的法規(guī)要求,進一步設(shè)計外透鏡,從而將內(nèi)透鏡準(zhǔn)直出射的光進行打散,這樣既可以更好的滿足配光區(qū)域,又能消除路面照度的眩光斑點。本文采用的外透鏡其內(nèi)表面為平面,外表面為陣列化的球面透鏡,也就是說,以球面透鏡作為單元,在外透鏡外表面上進行陣列排列。因此,球面透鏡的設(shè)計至關(guān)重要。假設(shè)該球面透鏡的母線經(jīng)過空間某一平面三個點A(xA,yA,zA),B(xB,yB,zB),C(xC,yC,zC),則其圓心坐標(biāo)為
(3)
其中D=2[xA(yB-yC)+xB(yC-yA)+xC(yA-yB)]。
該圓的半徑為
(4)
式中|AB|、|BC|、|CA|分別表示由A、B、C三點組成三角形ΔABC的邊長, |ΔABC|表示ΔABC的面積。根據(jù)式(3)和式(4),可以得到不同參數(shù)的圓弧,如圖3所示。將這些圓弧段導(dǎo)入軟件CATIA 中旋轉(zhuǎn)
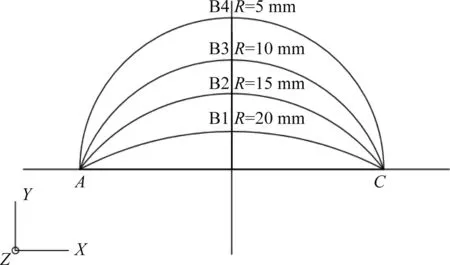
圖3 球面透鏡單元曲線Fig.3 The unit curves of spherical lens
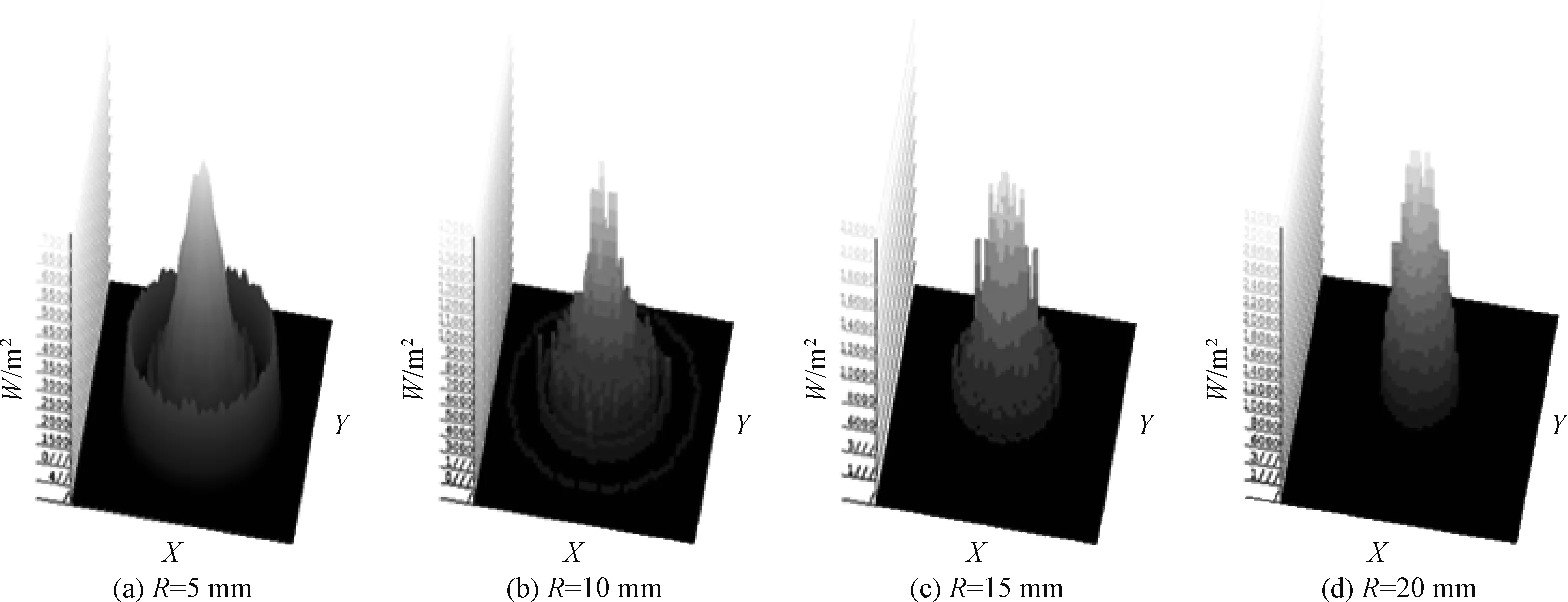
圖4 不同半徑球面透鏡的三維照度Fig.4 3D illumination of spherical lens of different radius
即可得到幾組不同參數(shù)的球面透鏡模型,設(shè)定球面透鏡到路面的距離為1 m,路面面積為1 m2,進而利用光學(xué)仿真軟件START進行光學(xué)仿真[17],以上述同一個準(zhǔn)直透鏡出射光線照射不同半徑R的球面透鏡,其對應(yīng)的三維照度分別為圖4(a)、(d)。圖4(a)中R=5 mm的球面透鏡對應(yīng)三維輻照度的峰值約為7 000 W/m2,其能量較為分散,整體也比較均勻;圖4(b)中R=10 mm的球面透鏡對應(yīng)三維輻照度的峰值約為16 000 W/m2,其旁瓣較小,能量較為集中;圖4(c)和(d)中R等于15 mm,22 mm的球面透鏡對應(yīng)三維輻照度的峰值約分別為20 000 W/m2,30 000 W/m2,其照度無明顯旁瓣,能量非常集中。由此看出,球面透鏡的半徑越大,經(jīng)過該透鏡的光在路面上的能量越集中,峰值也越大;反之,出射光的能量越分散,照度也越均勻。因此,選擇合適半徑的球面透鏡,并將該透鏡在外透鏡外表面上進行陣列化,然后組合內(nèi)外表面即可得到后霧燈的外透鏡。
3 后霧燈整體設(shè)計及結(jié)果
本文設(shè)計的后霧燈包括上述內(nèi)透鏡和外透鏡組合以及PCB板,其三維模型如圖5(a)所示,由于內(nèi)透鏡是由5個準(zhǔn)直透鏡單元呈十字形排列而成,為了配合內(nèi)透鏡,焊接在PCB板上的五顆LED光源也呈十字型排列,并且每顆LED位于準(zhǔn)直透鏡中心。為了觀察該后霧燈在點亮?xí)r其路照效果是否均勻,我們進行了點亮路照的仿真,設(shè)定內(nèi)透鏡的材料為PMMA8N,外透鏡的材料為PMMA18241, LED型號為LCYH9PP,其中每顆LED的光通量為20 lm,總光通量為100 lm,照明區(qū)域為20 m×6 m。其結(jié)果如圖5(b)所示,可看出在整個照明區(qū)域內(nèi),光斑均勻,無明顯的眩光。
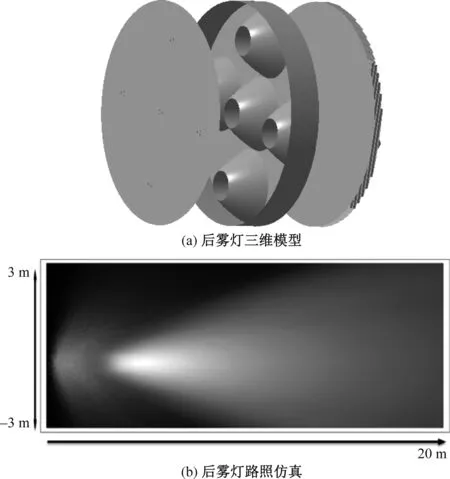
圖5 后霧燈三維模型與路照仿真Fig.5 3D model of rear fog and road illumination distribution
圖6(a)為后霧燈ECE R38法規(guī)的配光區(qū)域及要求。后霧燈ECE R38法規(guī)規(guī)定,在配光區(qū)域中,左右10°,上下5°的菱形區(qū)域內(nèi),整個區(qū)域的光強最小值不能低于75 cd,整個區(qū)域的光強最大值不能低于300 cd;在水平(H)和垂直(V)軸線上的值不能低于150 cd,也不能高于300 cd。圖6(b)為仿真坎德拉圖,圖中整個區(qū)域的范圍為左右20°,上下15°,水平(H)和垂直(V)軸線上每個小格單元為5°。外圈為75 cd的坎德拉線,表示在該線內(nèi)的光強值都不小于75 cd;內(nèi)圈為150 cd的坎德拉線,表示在該線內(nèi)光強值不小于150 cd;圖6(b)中整個區(qū)域的最大光強值為254 cd。對比圖6(a)中的ECE R38法規(guī),可知該后霧燈滿足ECE R38法規(guī)要求。后霧燈的效率一般定義為區(qū)域(Zone)光通量與總光通量的比值[18]。從圖6(b)中可以看出區(qū)域光通量為21.8 lm,又仿真時所用總光通量為100 lm,故該后霧燈的效率為21.8%,相較于傳統(tǒng)后霧燈只有5%~7%的效率,該后霧燈的效率有了明顯提高。
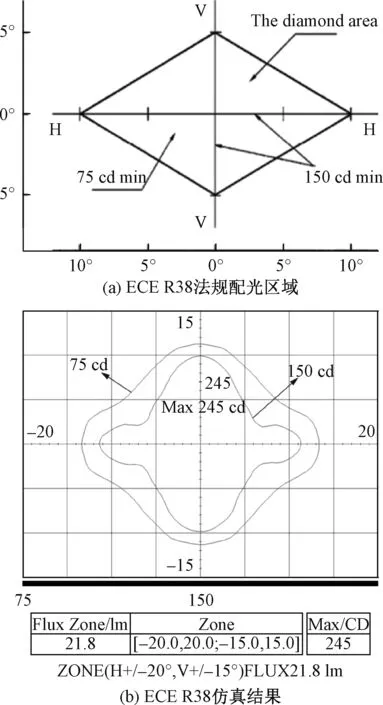
圖6 ECE R38法規(guī)配光區(qū)域及其仿真結(jié)果Fig.6 The distribution area of ECE R38 regulation and simulation results
進一步,為了更好地驗證該后霧燈的實效性,我們對該燈的實體模型(圖7)進行了實際檢測,其測試數(shù)據(jù)如表1所示,在左右10°上下5°的配光區(qū)域內(nèi),最小值為164 cd,最大值為214 cd,該測試數(shù)據(jù)與仿真結(jié)果較吻合,滿足ECE R38法規(guī)要求。

圖7 后霧燈實體模型Fig.7 The real model of rear fog
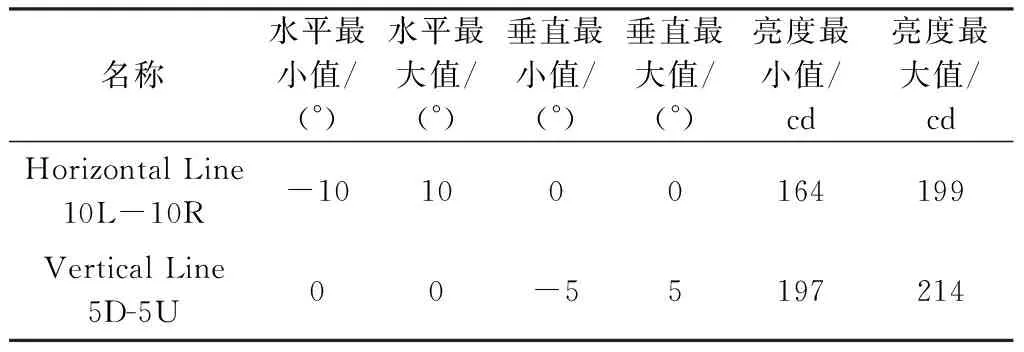
名稱水平最小值/(°)水平最大值/(°)垂直最小值/(°)垂直最大值/(°)亮度最小值/cd亮度最大值/cdHorizontal Line 10L-10R-101000164199Vertical Line 5D-5U 00-55197214
4 結(jié)論
本文根據(jù)非成像光學(xué)理論,設(shè)計了一款高效率、結(jié)構(gòu)緊湊、點亮路照均勻的后霧燈。區(qū)別于傳統(tǒng)的拋物面與燈泡的結(jié)構(gòu),該款后霧燈為內(nèi)外透鏡組合與LED光源的結(jié)構(gòu)。其中,內(nèi)透鏡為十字型陣列化的多個反射-折射的復(fù)合型準(zhǔn)直透鏡;外透鏡分為內(nèi)表面和外表面,而內(nèi)表面為平面,外表面為陣列化的多個球面透鏡。通過光學(xué)軟件仿真模擬以及實體模型的實際測試,發(fā)現(xiàn)該后霧燈滿足ECE R38法規(guī),并且光源的效率為21.8%,遠高于傳統(tǒng)后霧燈。另外,通過仿真分析點亮路照,無較為明顯的眩光光斑,整個點亮照度分布均勻。因此,該后霧燈具有較強的實用性,可用于汽車照明。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32
民生周刊(2012年10期)2012-10-14 09:06:46