基于GPS/BDS的四旋翼無人機導航研究與實現?
2018-11-26 07:55:00王宏凱趙屹男黃業凱
艦船電子工程 2018年11期
王宏凱 鐘 斌 趙屹男 黃業凱
(海軍工程大學 武漢 430033)
1 引言
隨著高新技術信息化程度的快速發展,無人機所發揮的作用越來越受到人們的關注,其在民用領域和軍事領域得到廣泛應用。無人機要實現穩定飛行必須有定位方式,全球衛星導航系統不僅可以提供三維位置和三維速度信息,還能利用相應的數據處理技術和多個天線,實現載體的航向角實時測量,該技術測量精度高、沒有時間累計誤差,是一種理想的航向測量手段[1]。目前市場上衛星定位方式主要采用全球定位系統(global positioning system,GPS)定位。考慮到有限資源的競爭以及電子戰、電磁戰等各種干擾信號的出現,衛星導航技術在未來的應用,尤其是軍事應用中將會受到極大的限制[2]。隨著北斗衛星導航系統(BeiDou navigation satellite system,BDS)的逐步完善,其應用研究正在成為熱點。但由于單一導航系統難以滿足無人飛行器的發展要求[3],于是產生了把2種或2種以上的不同導航系統以適當的方式組合在一起的組合導航方式,比使用單一導航系統具有更高的系統性能[4]。因此研究GPS/BDS雙模導航定位,既可以提高定位精度,又可以減小對GPS的依賴。
本文以四旋翼無人機為研究對象,利用GPS/BDS雙模模塊實現四旋翼無人機導航定位,大大提高了導航定位精度,并對精度分析研究。
2 定位解算方法
通過研究BDS/GPS共同組成的雙模導航定位系統,可很大程度上增加接收機可觀測衛星的數目以有利于組成最佳幾何分布。通過這種方式可以大幅提高定位精度及可靠性[5]。
2.1 單系統下用戶位置解算
GPS利用到達時間來進行對用戶位置到衛星端距離的測算。衛星信號從衛星傳遞到用戶接收機所用的時間,可以用時間乘以光速獲得偽距。但是由于本地時鐘與系統時鐘同步十分困難,因此想直接通過這種方法實現測距是難以現實的[6]。這時就需要結合4個衛星坐標:A1(x1,y1,z1) 、A2(x2,y2,z2)、A3(x3,y3,z3)及A4(x4,y4,z4),加上一個用戶接收機坐標Au(xu,yu,zu)以及用戶時鐘同系統時鐘偏差,可以得出4個偽距測量值,得到的偽距方程為
式中:ρ1、ρ2、ρ3、ρ4為衛星至接收機之間的偽距;c為電波傳播速度;tu為接收機用戶鐘誤差。
偽距方程組的意義是指以每顆衛星為球心,用戶的位置一定就在以偽距觀測值為半徑的球面上的一點。通過定位4顆球面交點的位置,可以獲得用戶接收機所處地點的坐標。
2.2 雙模導航系統定位求解方法
借用單模定位導航系統的定位原理可以推導雙系統定位的原理。雙模定位導航系統需要同時接收BDS及GPS的衛星信號,BDS以及GPS系統有其各自的時間系統,會產生時間測量值偏差,這就會多出一個時間偏差未知量。就需要多出一組偽距觀測值才能對用戶位置進行解算,所以也就導致需要增加一個偽距方程。得到單系統的定位方程為
式中:y表示( )m×1維的測量向量;H表示幾何觀測矩陣;ε表示測量誤差向量,x為用戶的狀態向量。BDS和GPS系統的觀測方程可分別表示為
設n和m分別為BDS以及GPS當前的星座中采用衛星數目,則可得BDS/GPS雙模定位導航系統的偽距觀測模型為
式中:HBD為BDS衛星同用戶之間的幾何觀測矩陣;1BD表示元素為1的n維列矢量;0BD表示元素為0的n維列矢量;εBD表示n維偽距誤差的列向量。同理,GPS表達式中各項的含義參照BDS。x=[xuyuzuΔtBDΔtGPS]T表示的是用戶的5維狀態矢量,其中xu、yu、zu表示的是用戶位置在坐標系當中的測量位置,ΔtBD、ΔtGPS均表示兩個系統與自身接收機鐘差所造成的距離誤差項。利用YCO,HCO,xCO,εCO對原式進行簡化,從而可以得到簡化的GPS/BDS雙模定位系統的定位方程為
使用最小二乘法來對其進行求解從而使各個函數值與實際測量值之差的平方和最小,解是最優的。使用加權最小二乘法是在最小二乘法的基礎上對數據中的相關性以及測量誤差向量的方差信息等做了優化,它并不依賴接收機的性能指標,受接收機位置影響較小。加權最小二乘法針對具有異方差性的模型,需要發展新的方法估計模型時具有十分出色的優化效果。它主要是通過對原模型進行加權,使之變為新的不存在異方差性的模型,然后采用普通最小二乘法估計其參數。
省略對流層以及電離層等系統延時所產生的偽距誤差,將BDS和GPS雙模系統的偽距數學模型整理成偽距形式為
其 中 Δρj=ρj-,? 為 將 近 似 位 置( )x?u,y?u,z?u和鐘差估計值 t?u代入式(1)得到的第 j顆 衛 星 的 偽 距 ,Δx=xu-? ,Δy=yu-? ,Δz=zu-,Δt=tu-,axj、ayj、azj為由近似位置指向第j顆衛星的方向余弦。
所以使用本節的解算方法,可以得到的解為
為了獲得精度更高的解,需要使用加權乘法來對數據進行處理,在這里增加一個權系矩陣W ,W為正定對稱矩陣,將上式轉化計算后得到
此時,得到的Δx便為雙模導航定位系統得到的最終定位結果。
3 實驗過程
3.1 軟硬件系統介紹
實驗中用到了如下的軟件和設備:軟件Mission Planner(APM地面軟件站)用于對無人機進行開發和飛行控制程序的下載。主要用于地面人員對無人機的遠程監控與管理。
它主要具備以下幾個功能:參數設置功能,飛行監控功能,地圖導航等功能。
U-center是用于GNSS的測評軟件,可以測評衛星定位精度、對衛星精度分析,也可用于修改導航定位模塊參數。
硬件:四旋翼無人機。主芯片Atmega2560控制器是ATMEGA系列AVR單片機中的一款。
測量模塊:MPU 6050,它集成了三軸MEMS加速度計和三軸MEMS陀螺儀以及一個可擴展的數字運動處理器DMP(Digital Motion Processor)。
空氣壓力傳感器:使用BMP085芯片作為空壓計。
無線數據傳輸模塊:利用無線網絡建立地面控制站與飛行器的通信鏈路,它是四旋翼無人機的重要組成部分。
導航模塊:UBLOX-NEO-M8N-001模塊,它是GPS/BDS雙模導航模塊。
3.2 無人機飛行試驗
實驗利用APM2.6的上位軟件Mission Planner對飛行控制板控制程序進行下載。在修改GPS/BDS模塊的波特率和衛星系統的過程中,采用U-center軟件對導航模塊進行測試,可以防止在切換衛星系統后不能正常工作。同時在測試衛星系統時可以對衛星系統的性能做比較,可作為后文精度對比的參考。
通過檢測可以得出單一衛星系統,BDS搜索到的衛星要比GPS的多一些,但GPS要比BDS衛星信號質量好且精度高。雙衛星系統具有比單一衛星系統搜星能力好、精度高的特點。
GPS/BDS測試圖如圖1所示。
在完成固件下載及系統調試之后,就可以進行室外飛行試驗。在開始飛行之前,首先應該搭建一個穩定、可靠的飛行實驗平臺。下面是飛行試驗平臺搭建及試驗的具體步驟,圖2為流程圖,圖3~圖5為航跡圖,實驗時間為2017年4月12日上午。
4 數據采集與精度比較分析
本文采用UBLOX-NEO-M8N-001模塊,它是GPS/BDS雙模導航模塊。同一模塊可以通過軟件自由切換衛星系統,這樣就避免了做工造成的精度誤差。由于技術原因,此模塊不具備存儲航行數據的功能,所以本文采用APM2.6記錄飛行定位數據。這樣就能保證同時采集到GPS和BDS的定位數據。本文在進行飛行測試時,做到接近連續分別對GPS和BDS的定位數據進行采集,盡可能減小由于采集時間不同引起的誤差,使數據在有效范圍內[7,13]。
精度衰減因子(dilution of precision,DOP)反映了衛星的幾何分布對定位誤差的影響,是衡量導航系統性能的重要指標。觀測條件較差的情況下,單一系統的衛星可見性減弱,DOP值偏大,導航定位精度降低[8~9]。而組合衛星導航系統增加了可見衛星數,可以改善衛星系統DOP值。在比較衛星定位精度時,主要用鐘差精度因子(time dilution of precision,TDOP)、3維精度因子(position dilution of precision,PDOP)、垂直分量精度因子(vertical dilution of precision,VDOP)、幾何精度因子(geometric dilution precision,GDOP)、水平分量精度因子(horizontal dilution of precision,HDOP)對衛星精度進行比較。在相同測量誤差條件下,DOP值越小,意味著可能較小的誤差[10~12]。
除此之外,可視衛星數也可以衡量衛星系統的定位好壞。捕捉到的可視衛星數目越多意味著定位的效果可能越好。本文主要是比較在水平位置的精度,因此本文主要對可視衛星數和HDOP值進行采集。
通過飛行實驗,本文分別對GPS導航系統、BDS導航系統和GPS/BDS組合導航系統的可視衛星數和HDOP值采集分析,實現對三者導航定位性能的評估。下面是無人機在飛行過程中可視衛星數的變化,如圖6~圖8所示。
從可見衛星數上可以看出,四旋翼飛行器在運動過程中,GPS的可見衛星數大約在8~9顆,BDS的可見衛星數大約在10~11顆,而GPS/BDS組合導航下的可見衛星數大約在19~20顆。這說明了在GPS/BDS導航定位橫向比較中,BDS的可見衛星數比較多而且較穩定,說明GPS/BDS在本地區具有更強的信號。另一方面,在比較單一衛星導航系統和GPS/BDS組合導航系統時,GPS/BDS組合導航系統在可視衛星數量上遠超于單一定位衛星導航系統,同時也具有較好的穩定性。圖9~圖11是無人機飛行過程HDOP的變化。
從HDOP值上可以看出,GPS的HDOP值范圍在1.62~1.94內,BDS的HDOP值范圍在1.75~1.90內,而GPS/BDS組合導航時的HDOP值范圍在1.18~1.44內。這說明了,在橫向比較GPS/BDS的HDOP值時,GPS的HDOP值要比BDS的小,同時從HDOP值小于1.7的時間上看,GPS明顯優于BDS。
另一方面,在縱向比較單一衛星導航系統和GPS/BDS組合導航系統的HDOP值時,GPS/BDS組合導航系統HDOP值遠小于單一的衛星導航系統的HDOP值,并且波動范圍也相對較小,這說明GPS/BDS組合導航系統在精度上比單一導航系統的精度要好。本文試驗的結果與模塊的測試結果相符,實現3種組合導航系統定位性能的評估。表2為GPS、BDS和GPS/BDS的定位參數對比。
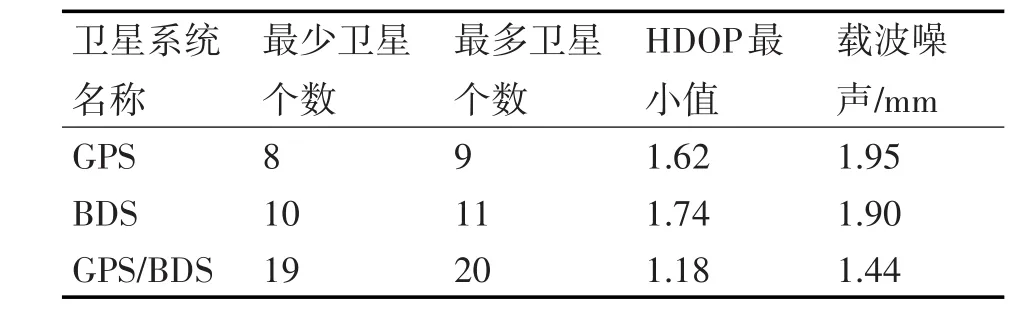
表2 GPS、BDS和GPS/BDS的定位參數對比
從表2可以看出:BDS相比GPS,增加了地球靜止同步軌道衛星,在中國及周邊區域附近,BDS的搜星能力要比GPS的好。但GPS的空間幾何結構更好,GPS定位精度較高。因此可以結合兩者的優點,利用GPS/BDS組合導航,使衛星星座構成更好的結構,這樣在衛星可見性和HDOP值方面都比單一系統有很大改善。尤其是在觀測條件較差時,改善作用更為明顯。一方面,降低丟星的概率,使可視衛星數目更穩定,另一方面提高了定位精度。
5 結語
通過搭建包含四旋翼無人機的最小試驗系統,表明對于傳統的單一衛星導航定位,在可見衛星數方面,BDS(10~11顆)優于GPS(8~9顆),BDS的可見衛星數比較多而且較穩定;在HDOP值上,從HDOP值小于1.7的時間來看,GPS(1.62~1.94)有比BDS(1.75~1.90)較明顯的優勢。而GPS/BDS組合導航在可視衛星數(19顆)、HDOP值(1.18~1.44)方面結合單一衛星導航定位的優勢,具有最好的導航定位效果,從一定程度上改善了四旋翼無人機導航定位精度較低的問題,是理想的雙模組合導航定位系統。鑒于篇幅有限,本文只著重對可視衛星數和HDOP值進行采集和比較,并未對其他精度因子進行論述,在接下來的研究中可針對GPS/BDS組合導航的整體效果進行分析。
隨著BDS導航系統的迅速發展和目前多模系統研究的發展變化,可以預見,搭載多模系統的無人機可在遠程位置浮標定位監控,基于無人機的航拍或氣象信息收集,落水海員迅速救援等諸多方面發揮重要作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年10期)2015-02-27 07:55:08