相對水平度無線差分測量系統對時方案設計?
2018-11-26 07:55:12劉愛東王鵬超
艦船電子工程 2018年11期
劉愛東 王鵬超
(海軍航空大學 煙臺 264001)
1 引言
相對水平度無線差分測量系統是一種以差分測量方式測量分布于艦船不同位置處的各裝備基準面之間的相對水平度的無線傳感器網絡[1]。
在艦船航行或系泊狀態下,受船體搖擺影響,對相對水平度測量只能通過差分測量方式測量,而差分測量方式需要對同一時刻測量數據進行差分,此時系統內時鐘的不同步會造成測量誤差,這要求系統能夠維持一個全局一致的時鐘。
本文通過對GPS(Global Positioning System)外部對時[2]、NTP(Network Time Protocol)網絡時間協議[3]和PTP1588時鐘同步協議[4]等傳統的時鐘同步方法的使用環境、同步精度等因素的比較,最終選擇使用PTP1588時鐘同步協議。
2 對時精度需求分析
2.1 系統總體精度要求
相對水平度無線差分測量系統主要應用于艦船水平對準工作,根據國家相關標準要求,用于對準的測試設備工作精度至少要達到被標設備工作精度的1/3。
目前市場上單臺水平儀對水平度的測量精度一般可以達到2″,對兩平面之間相對水平度測量精度即為4″,因此要求時間同步精度影響的測量精度在2″以上[6]。
對準工作要求海況風力小于3級、海況小于4級。在此海況下,艦船最大搖擺幅度為±0.5°,最短搖擺周期為 6s[7]。
艦船裝備基準面水平度φ可以近似看做滿足正弦函數φ=0.5×sin(×t)+φ。當基準面水平度0處于φ=φ0周圍時角度變化速率達到最快,相同時間同步精度下由于時間不同步造成的測量誤差也達到最大。此時,角度誤差值2″對應的時間誤差約為1ms。因此,時間同步精度要求為1ms。
2.3 對時精度要求
造成系統時鐘不同步的原因包括對時不準確和守時時鐘漂移。
守時時鐘精度取決于晶振的準確度,目前市場上通用晶振的準確度可以達到 ±1×10-7,即±0.1μs/s。在不考慮對時精度情況下,當系統運行時間達到2.7h,累計誤差將達到1ms,系統必須重新對時,以保證同步精度合格[8]。
為盡量減少對時次數,一次對時精度越高越好,最低要求對時精度應達到微秒級。
GPS同步方式無法在甲板以下工作,不適用于本系統應用環境要求。NTR是一種低成本的時鐘同步方案,但其同步精度較低,只能達到毫秒,不適用于本系統對高精度時鐘同步的需求。PTP1588時鐘同步協議提供了以較低成本實現亞微秒級同步的方案,滿足系統需求。
水平對準包括輔基準對準,基座對準,設備對準,平臺羅經、慣導平臺對準,其中輔基準對準精度要求最高,按照GJB 1233A-2008中5.2.1要求,艦船基準平臺水平度偏差應不大于30″,輔基準與主基準偏差應不大于20″,因此要求系統總測量精度應高于6 ″[5]。
2.2 同步精度要求
3 PTP 1588協議
3.1 基本同步原理
PTP系統采用主從層次式結構,通過主時鐘節點與從時鐘節點之間同步、跟隨、延時請求、延時響應4種類型的同步協議報文傳輸,獲取從時鐘相對于主時鐘的偏差(offset)和傳輸延時(delay),并進一步對從時鐘校準,適用于網絡環境穩定的本地化局域網環境[9]。
其實現機制如圖1所示,從時鐘節點利用主時鐘節點傳輸的T1、T4時間和自身記錄的 T2、T3時間計算從時鐘相對于主時鐘的偏差和傳輸延時。這里假定同步報文與延時請求報文的傳輸延時相同,即路徑是對稱的。
從時鐘相對于主時鐘的偏差和傳輸延時計算公式為
3.2 時鐘模型
PTP 1588協議中規定了五種時鐘類型:普通時鐘(Ordinary Clock,OC)、邊界時鐘(Binary Clock,BC)、端到端透明時鐘(End to End Transparent Clock,E2E TC)、點對點透明時鐘(Peer to Peer Transparent Clock,P2PTC)和管理節點[10]。
3.3 延時測量機制
PTP1588提供了兩種延時測量機制:延時請求-響應機制和同等延時機制。延時請求-響應機制常常用于包含E2E的網絡,因此通常稱為E2E延時測量機制;同等延時機制常常用于包含P2P的網絡,因此通常稱為P2P延時測量機制。
在采用E2E延時測量機制的網絡中,只在從時鐘計算路徑總延時,網絡內其他端口均不計算延時。也就是說在E2E延時測量機制中,延時報文交互是在主時鐘和每個從時鐘間進行的,每個從時鐘都向主鐘發送延時請求報文,主鐘對每個從時鐘回答延時響應報文。
在采用P2P延時測量機制的網絡中,每條鏈路的兩個端口都計算本鏈路延時。也就是說在P2P延時測量模式中,延時報文交互是在每條鏈路的兩個端口間進行的。
4 相對水平度無線差分測量系統
4.1 系統組成結構及工作流程
相對水平度無線差分測量系統主要功能為完成系泊或航行狀態下艦船各設備基準面之間相對水平度的差分測量。系統由數據采集模塊、數據傳輸模塊和數據處理模塊三部分組成,其中數據傳輸模塊又分為終端、路由和協調器數據傳輸模塊。
其組成結構如圖4,相對水平度測量過程如下:
1)數據采集模塊通過水平儀采集所測平面的水平度數據,并通過守時時鐘采集對應的時間信息數據。
2)數據采集完畢后,通過有線方式將數據傳遞給終端數據傳輸模塊,終端數據傳輸模塊進行數據融合和轉發,將數據傳輸到協調器數據傳輸模塊。
3)協調器數據傳輸模塊轉發數據至數據處理模塊,數據處理模塊在接收到數據后通過筆記本電腦對數據進行差分處理。
該系統要求系統中所有終端節點維持一個全局統一的時間標準[11],能夠對分布于不同位置的水平儀采集到的數據在終端處加上準確的時間戳。
4.2 系統網絡特點
PTP1588協議要求應用于網絡環境穩定、安全的局域網。相對水平度無線差分測量系統是一種層次結構、網絡節點固定的分布式無線傳感器網絡。
其網絡特點如下:
1)采用星型網絡拓撲結構,具有明確的中心節點。
2)中心節點與特定終端節點間有唯一確定的鏈狀傳輸路徑。
3)路徑上各節點相對位置固定,運行后設備個數固定,不會隨時投入退出,因此不需要頻繁對時。
4)不同傳輸路徑上的路由節點相互獨立,即針對特定的路由節點僅有唯一的上一級節點和下一級節點與其進行數據交互。因此不存在通信路徑之間的PTP報文環。
5)所有節點硬件參數指標可視為一致,且路由節點僅完成數據轉發功能。
6)正向轉發與反向轉發路徑可視為對稱。
7)各節點通信速率較低,串口通信波特率為9600bps,空中速率為2400bps。
8)系統對時工作單獨進行,不存在PTP事件報文與其他報文間的相互影響,網絡流量負載波動少,時間抖動小。
根據其網絡特點可以看出,相對水平度無線差分測量系統網絡拓撲較為穩定很少變化,很適合用PTP1588進行時間同步。
5 PTP協議在系統中應用
5.1 建立主從體系
PTP系統采用主從層次式結構,從時鐘節點根據時鐘報文調整到主時鐘節點時間。
本系統只存在一個域,選擇中心節點作為主時鐘節點,終端節點作為從時鐘節點,因為域中只有一個主時鐘,因此主時鐘即為最高主時鐘。
5.2 時鐘模型選擇
為消除路由節點存在的延時抖動現象,路由節點一般選擇為邊界時鐘或透明時鐘。
邊界時鐘通過逐級對時的方法減小延時抖動,0透明時鐘通過測量駐留時間,并寫入報文校正域來減小延時抖動。
邊界時鐘方法會造成對時的時間開銷增加。透明時鐘方法造成PTP報文長度增加,在低速率網絡中也會顯著增加對時開銷。
在相對水平度測量系統中,路由節點不與多個路徑共享,對時時路由節點只為對時事件報文服務,又可以通過對報文格式設計,使報文長度保持一致,達到每個對時事件報文通過路由節點的時間不變的目的,將延時抖動控制在可接受范圍之內。此時,可直接將路由節點看成鏈路的一部分,此時可將駐留延時和鏈路延時統一考慮。
5.3 延時測量機制選擇
由于相對水平度測量系統中邏輯上將路由節點看做鏈路一部分,不存在多于兩個的其他端口,因此選擇延時請求-響應機制,將駐留延時和鏈路延時統一考慮,只在主從時鐘處計算路徑總延時。
5.4 時間戳獲取方法
時間戳的獲取誤差也是影響對時精度的一個重要因素[12]。時間戳的獲取分為兩種情況,一種是接收到報文的時間戳點的時間戳獲取,另一種是發送報文的時間戳點的時間戳獲取。
設計中系統采用16位內部計數器計數+16位軟件計數,共32位計數值作為本地的時鐘值。選取E32-TTL-500無線模塊來進行數據的收發。
該模塊在收到數據包后,模塊AUX口輸出低電平,并延遲5s后,開始將無線數據通過串口TXD引腳發出,在接收報文時,利用無線模塊所產生的中斷信號來觸發獲取當前時鐘計數器的值。當接收緩存區輸出最后一位數據時,模塊將AUX輸出高電平,利用該引腳此時輸出的上升沿產生接收中斷,獲取此時間戳點的時間戳。
在發送報文時,利用計時滿時產生的計數器溢出中斷,將當前計數器值寫入發送數據中,立即發送。利用此種方法每次時間戳獲取的時刻點抖動非常小,可以較為精確地獲得數據發送前一時刻和剛接收到數據的時刻,從而能保證本設計最終得到較高的同步精度。
5.5 PTP報文設計
PTP1588規定所有報文都應具有報頭、報體和報尾,報尾長度可以為0,報頭長度34字節[13]。
該報文對路由節點速率有較高要求,在低速率網絡中會顯著增加對時時間,顯然不適合本系統。如在本系統中每增加一個字節的報文長度,就會造成在每個路由節點上的駐留時間增加大約70ms,在有共n個路由節點的系統中對時時間至少會增加n×3×70(ms),如增加對時精度校驗,則時間開銷增加會更多。為使報文適應本系統要求,對PTP報文進行裁剪,重新設計。
本系統應用有同步、延時請求、延時響應3種類型的同步協議報文,為使所有報文經過路由節點駐留時間相同,要求每種類型報文長度相同。所有對時報文應用統一格式。
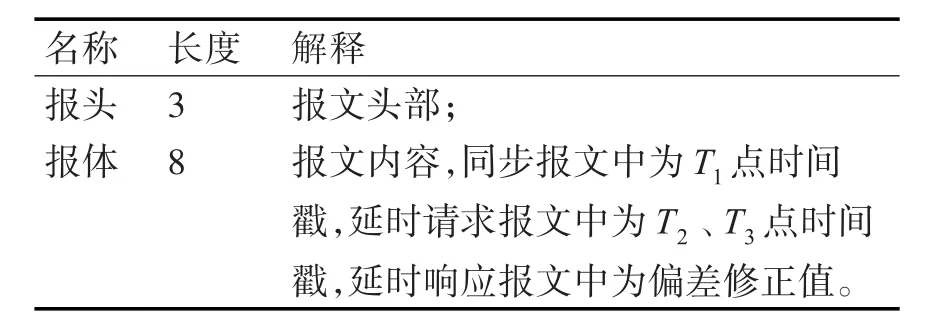
表1 報文格式
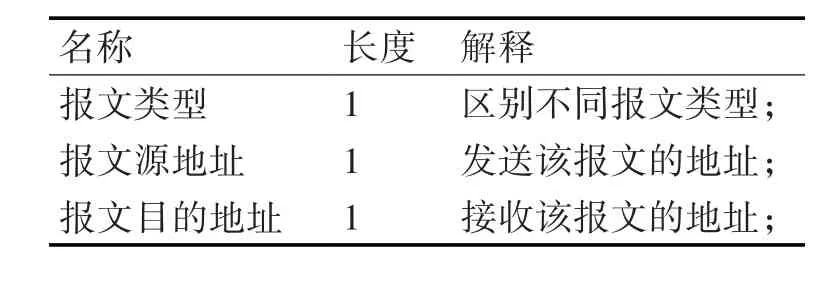
表2 報頭格式
6 誤差分析
6.1 通信通道的對稱性
從同步原理可以看出,從時鐘相對于主時鐘的偏差和傳輸延時計算都是建立在轉發路徑可視為對稱的假設基礎上。
本系統雖然對設備進行了針對性設計,盡可能減小通信通道的不對稱性,但由于多徑效應、設備硬件差異等因素的影響,仍會對對時精度造成一定影響。
6.2 時間戳的準確性
在PTP協議中共需要獲取四次時間戳值,包括兩次接收到報文的時間戳點的時間戳獲取,兩次發送報文的時間戳點的時間戳獲取。
由于不同節點上無線模塊和晶振時鐘存在差異,獲取的時間戳也會存在誤差,最終導致對時誤差。
7 結語
本文對PTP 1588協議的工作原理、時鐘模型和延時測量機制等關鍵點進行了分析,并根據網絡特點和對時精度需求對PTP 1588協議在相對水平度無線差分測量系統的應用進行了研究設計。
PTP 1588是一個通用的時間同步協議,在特定系統中的應用應根據此系統的網絡特點和對時精度需求,選取合適的機制和參數,對不滿足系統需求的部分應進行針對性改進設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45