粒子群優(yōu)化人工神經(jīng)網(wǎng)絡(luò)的RFID室內(nèi)定位算法*
2018-11-28 02:12:46陳珊珊史志才張玉金陳計(jì)偉
傳感器與微系統(tǒng) 2018年12期
關(guān)鍵詞:優(yōu)化
陳珊珊, 史志才, 吳 飛, 張玉金, 陳計(jì)偉
(上海工程技術(shù)大學(xué) 電子電氣工程學(xué)院,上海 201620)
0 引 言
隨著無(wú)線傳感、移動(dòng)通信和互聯(lián)網(wǎng)技術(shù)的快速發(fā)展,室內(nèi)定位信息服務(wù)已經(jīng)成為當(dāng)前研究熱點(diǎn)。雖然全球定位系統(tǒng)(global positioning system,GPS)從建立以來(lái)就廣泛應(yīng)用于室外定位,但GPS在室內(nèi)環(huán)境中由于缺乏衛(wèi)星接收器與衛(wèi)星之間的視線傳播,難以滿足在室內(nèi)環(huán)境下進(jìn)行精度定位的要求[1]。
用于室內(nèi)定位和室內(nèi)導(dǎo)航服務(wù)的多種不同的定位方式中[2],射頻識(shí)別(radio frequency identification,RFID)因成本低廉、系統(tǒng)部署簡(jiǎn)單,在室內(nèi)定位和跟蹤中得到廣泛應(yīng)用。傳統(tǒng)RFID定位方法是依據(jù)傳播模型中信號(hào)強(qiáng)度損耗和距離的關(guān)系獲得標(biāo)簽與閱讀器之間的距離,利用幾何方法得到標(biāo)簽的坐標(biāo)。但室內(nèi)的信號(hào)傳輸不穩(wěn)定,室內(nèi)環(huán)境復(fù)雜,導(dǎo)致室內(nèi)環(huán)境下建立的信號(hào)傳播模型缺乏適用性[4]。目前人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,ANN)也應(yīng)用于室內(nèi)定位中,該方法存在對(duì)初始權(quán)值敏感、易陷入局部最優(yōu)和收斂速度慢等缺點(diǎn)。
本文將粒子群優(yōu)化算法與人工神經(jīng)網(wǎng)絡(luò)算法相結(jié)合,首先利用粒子群優(yōu)化(particle swarm optimization,PSO)算法對(duì)神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值進(jìn)行優(yōu)化,避免了人工神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)值陷入局部最優(yōu)。然后用過(guò)濾后的訓(xùn)練數(shù)據(jù)訓(xùn)練定位模型,建立目標(biāo)位置預(yù)測(cè)模型,有效改善了人工神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)能力,具有預(yù)測(cè)時(shí)間短、所需訓(xùn)練數(shù)據(jù)少和預(yù)測(cè)精度高等優(yōu)點(diǎn)[5]。
1 RFID室內(nèi)定位算法分析
RFID的工作原理是當(dāng)標(biāo)簽進(jìn)入閱讀器檢測(cè)范圍時(shí),標(biāo)簽和閱讀器之間將會(huì)通過(guò)天線建立通信,閱讀器將會(huì)讀取標(biāo)簽反饋的RFID數(shù)據(jù),包括時(shí)間、接收信號(hào)強(qiáng)度指示(received signal strength indication,RSSI)值和身份(identification,ID)信息等。
一般閱讀器獲取定位標(biāo)簽的信號(hào)強(qiáng)度隨著傳播距離的增加而減弱,其中信號(hào)強(qiáng)度值和傳播距離模型[6]為
(1)
式中RSSI(d)為閱讀器讀取與其相距為d(m)的電子標(biāo)簽的信號(hào)強(qiáng)度,P0為閱讀器讀取參考距離為d0(m)時(shí)電子標(biāo)簽的信號(hào)強(qiáng)度,γ為信號(hào)的路徑損耗系數(shù),d為閱讀器與標(biāo)簽之間的距離,εδ為高斯噪聲。
2 室內(nèi)定位算法的改進(jìn)
ANN是一種模擬生物特征的算法,具有靈活的自學(xué)習(xí)、自適應(yīng)、自組織等特點(diǎn)。然而,經(jīng)過(guò)ANN預(yù)測(cè)的結(jié)果可能是局部最優(yōu)值[7]。文獻(xiàn)[8]通過(guò)PSO確定ANN的隱含層的最佳節(jié)點(diǎn)數(shù)和最優(yōu)學(xué)習(xí)率,將優(yōu)化后的ANN分別用于室內(nèi)和室外的定位,實(shí)驗(yàn)結(jié)果表明優(yōu)化后的算法減少了室內(nèi)和室外的定位誤差。本文為了提高定位精度,對(duì)數(shù)據(jù)進(jìn)行了高斯濾波處理,另外提出了一種基于PSO優(yōu)化ANN(PSO-ANN)的定位算法,通過(guò)用PSO優(yōu)化ANN的權(quán)值和閾值,以此來(lái)避免ANN預(yù)測(cè)值陷入局部最優(yōu),從而改善ANN的預(yù)測(cè)效果,提高ANN的學(xué)習(xí)速度。
圖1為PSO優(yōu)化ANN的迭代進(jìn)化曲線,從圖中可以看出當(dāng)進(jìn)化次數(shù)達(dá)到65時(shí),適應(yīng)度函數(shù)值趨于穩(wěn)定,因此本文選擇65作為PSO優(yōu)化ANN的進(jìn)化次數(shù)。
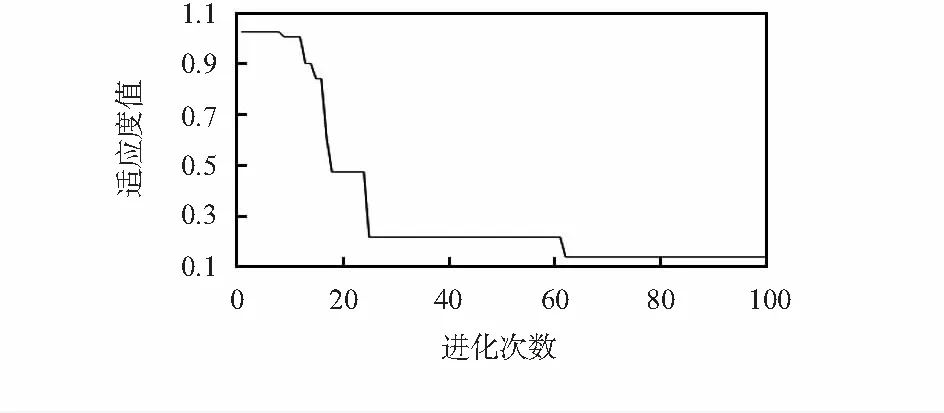
圖1 最優(yōu)個(gè)體適應(yīng)度值
2.1 定位模型
RFID室內(nèi)定位信息服務(wù)是建立高斯濾波后的RSSI向量與位置坐標(biāo)之間的關(guān)系,可以描述為如下對(duì)應(yīng)關(guān)系:

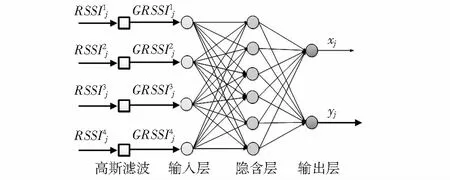
圖2 定位算法的結(jié)構(gòu)
圖2中定位過(guò)程分為離線階段和在線階段。
1)離線階段,4個(gè)閱讀器分別重復(fù)讀取50次每個(gè)參考標(biāo)簽的RSSI值,對(duì)重復(fù)讀取的50個(gè)RSSI值進(jìn)行高斯濾波處理,并將處理后的RSSI值與每個(gè)參考標(biāo)簽的坐標(biāo)作為訓(xùn)練數(shù)據(jù)。另外需要初始化粒子群算法的位置和速度,用訓(xùn)練數(shù)據(jù)作為粒子群算法的輸入得到最優(yōu)的ANN權(quán)值和閾值,最后將優(yōu)化后的ANN作為本文的定位模型。
2)在線階段,需要把待定位標(biāo)簽接收的RSSI向量經(jīng)過(guò)高斯濾波處理后獲得(Gauss RSSI,GRSSI)向量作為定位模型的輸入,由定位算法得到的坐標(biāo) 即是待定位標(biāo)簽估計(jì)的定位位置。
2.2 數(shù)據(jù)濾波
在實(shí)際室內(nèi)環(huán)境中,閱讀器在同一位置重復(fù)測(cè)量的RSSI值遵循高斯分布[11]
(2)
式中σ2為方差,A為期望值,有
(3)
式中n為測(cè)量RSSI值的總次數(shù),RSSIk為第k次測(cè)得的RSSI值。
3 實(shí)驗(yàn)結(jié)果分析
3.1 實(shí)驗(yàn)場(chǎng)景
本文使用MATLAB軟件對(duì)提出的算法進(jìn)行驗(yàn)證,完成了一系列仿真實(shí)驗(yàn)來(lái)驗(yàn)證提出算法的效果。定位場(chǎng)景是在一個(gè)12 m×5 m的長(zhǎng)方形區(qū)域內(nèi),如圖3所示,布置的參考標(biāo)簽形成了2維地圖,每一個(gè)物理格被4個(gè)閱讀器信號(hào)覆蓋。在定位地圖中,布置有50個(gè)參考標(biāo)簽,其相鄰參考標(biāo)簽之間間隔1 m。另外,在定位地圖放置4個(gè)閱讀器天線來(lái)收集PSO-ANN的RSSI樣本值。仿真前需要根據(jù)所有參考標(biāo)簽的坐標(biāo),分別計(jì)算出與4個(gè)閱讀器之間的距離,將距離根據(jù)式(1)生成對(duì)應(yīng)的RSSI向量,其中r取10;并在RSSI數(shù)據(jù)中添加均值為0、標(biāo)準(zhǔn)差為3的高斯噪聲,作為RSSI的隨機(jī)分量,以模擬實(shí)際環(huán)境中的噪聲,然后通過(guò)高斯濾波對(duì)接收的RSSI值進(jìn)行去噪。將參考標(biāo)簽的坐標(biāo)和其對(duì)應(yīng)的信號(hào)強(qiáng)度向量作為ANN和PSO-ANN的訓(xùn)練數(shù)據(jù),用于兩者的訓(xùn)練,使得訓(xùn)練后的ANN和PSO-ANN能夠預(yù)測(cè)待定位標(biāo)簽的位置。
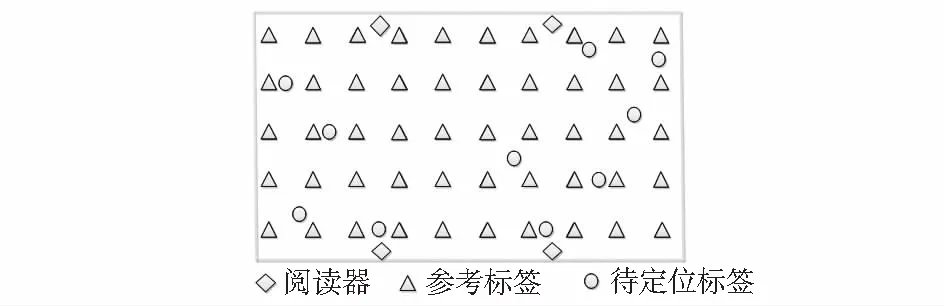
圖3 定位系統(tǒng)模擬環(huán)境
3.2 實(shí)驗(yàn)結(jié)果
隨機(jī)生成50個(gè)待定位標(biāo)簽的二維坐標(biāo),分別計(jì)算出每個(gè)待定位標(biāo)簽與4個(gè)閱讀器之間的距離,利用式(1)計(jì)算每個(gè)待定位標(biāo)簽的RSSI向量,將這50個(gè)待定位標(biāo)簽的RSSI向量經(jīng)過(guò)濾波處理后獲得GRSSI向量,將GRSSI向量分別作為ANN和PSO-ANN的輸入,分別通過(guò)2種算法預(yù)測(cè)出50個(gè)待定位標(biāo)簽的坐標(biāo),每種算法對(duì)50個(gè)待定位標(biāo)簽共進(jìn)行了50次位置預(yù)測(cè)。ANN和PSO-ANN仿真測(cè)試結(jié)果分別如圖4所示,圖中實(shí)際輸出代表待定位標(biāo)簽的預(yù)測(cè)位置,期望輸出代表待定位標(biāo)簽真實(shí)位置。可以看出PSO-ANN算法的實(shí)際輸出要比ANN更接近期望輸出,即PSO-ANN預(yù)測(cè)的位置結(jié)果要比ANN更接近真實(shí)位置。
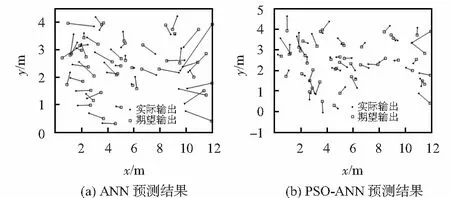
圖4 2種算法預(yù)測(cè)結(jié)果對(duì)比
以位置誤差驗(yàn)證測(cè)量系統(tǒng)的定位精度。第j個(gè)標(biāo)簽的測(cè)量位置的誤差ej定位的平均誤差eA為
(4)

本文將ANN算法和PSO-ANN算法分別對(duì)50個(gè)待定位標(biāo)簽的位置預(yù)測(cè)誤差進(jìn)行了比較與分析,其2種算法的50次預(yù)測(cè)待定位標(biāo)簽的誤差比較如圖5所示,從圖5中可以看出本文算法的預(yù)測(cè)定位效果比人工神經(jīng)網(wǎng)絡(luò)效果好。
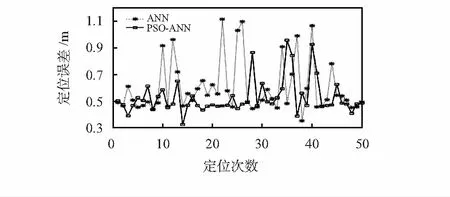
圖5 2種定位算法的誤差比較
對(duì)2種算法對(duì)50個(gè)待定位標(biāo)簽的位置預(yù)測(cè)誤差進(jìn)行了分析。從表1中可以看出ANN和PSO-ANN的平均誤差分別為0.621 9 m和0.504 7 m,另外根據(jù)兩種算法的標(biāo)準(zhǔn)差可知PSO-ANN算法比ANN算法的穩(wěn)定性更好。對(duì)比結(jié)果表明本文定位算法的定位精度和穩(wěn)定性均優(yōu)于ANN定位算法。表1中根據(jù)文獻(xiàn)[12]所獲得的另外2種不同定位算法的平均定位誤差,通過(guò)比較4種算法的平均誤差,可知傳統(tǒng)RFID定位效果比其他3種定位算法差,而本文提出的算法誤差要小于文獻(xiàn)[12]提出的算法。
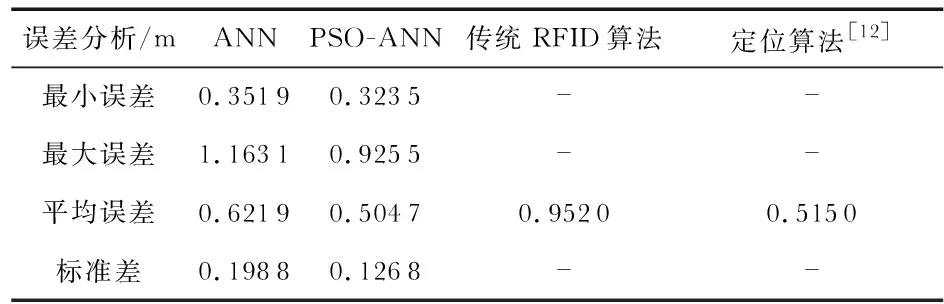
表1 4種算法誤差對(duì)比
4 結(jié) 論
提出一種用粒子群優(yōu)化人工神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值的算法。同時(shí)為了減少室內(nèi)復(fù)雜環(huán)境對(duì)信號(hào)強(qiáng)度的干擾,提出了用高斯濾波處理RSSI值。實(shí)驗(yàn)結(jié)果表明,本文提出的室內(nèi)定位算法提高了RFID室內(nèi)定位精度,具有更穩(wěn)定的定位性能,能夠更好地適應(yīng)復(fù)雜的室內(nèi)環(huán)境。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45