小型多旋翼無人機(jī)動力系統(tǒng)參數(shù)的測定
2018-12-03 08:20:04朱利凱
安徽工程大學(xué)學(xué)報 2018年4期
關(guān)鍵詞:實驗
黃 強(qiáng),王 海*,劉 明,姚 剛,朱利凱
(1.安徽工程大學(xué) 機(jī)械與汽車工程學(xué)院, 安徽 蕪湖 241000;2.中國科學(xué)院合肥智能機(jī)械研究所, 安徽 合肥 340104)
隨著航空技術(shù)的發(fā)展,無人機(jī)開始出現(xiàn)在人們生活的各個領(lǐng)域,而小型多旋翼無人機(jī)因為其優(yōu)異的可控性和垂直起降的特性,在航空攝影、農(nóng)業(yè)植保、運(yùn)輸、電力檢測等方面都有非常廣泛的應(yīng)用[1].最近幾年,隨著微機(jī)電和微傳感器不斷發(fā)展與更新升級,對于多旋翼飛行器的研究有了很大進(jìn)展,在一定程度上解決了多旋翼飛行器開發(fā)的一些關(guān)鍵問題[2].多旋翼飛行器的動力系統(tǒng)一般由直流無刷電機(jī)、螺旋槳以及電子調(diào)速器組成,而動力系統(tǒng)的參數(shù)則直接影響多旋翼樣機(jī)的飛行時間、載重、飛行姿態(tài)控制等重要指標(biāo),所以在多旋翼飛行器設(shè)計前對動力系統(tǒng)的參數(shù)進(jìn)行實驗標(biāo)定具有很重要的意義.對于多旋翼動力系統(tǒng)的研究,文獻(xiàn)[3]通過硬件和軟件結(jié)合的方式設(shè)計了一種轉(zhuǎn)子升力測試平臺,并建立轉(zhuǎn)子升力動態(tài)模型.最后通過實驗驗證了該升力動態(tài)模型的有效性.文獻(xiàn)[4]提出四旋翼飛行器的精確控制需要使用動力系統(tǒng)推力,而該飛行器推力不可直接測量,繼而推出一種懸停狀態(tài)下的四旋翼推力估計方法,并對四旋翼動力系統(tǒng)建模,建立了懸停狀態(tài)下用于推力估計的線性系統(tǒng).
目前的研究表明,多旋翼無人機(jī)設(shè)計過程中動力系統(tǒng)參數(shù)對其飛行控制具有重要影響,而現(xiàn)階段要么將轉(zhuǎn)子系統(tǒng)固定在一維力傳感器上對其單一的動力學(xué)參數(shù)如升力、轉(zhuǎn)速等進(jìn)行檢測,要么采用實驗成本較高的風(fēng)洞試驗、電機(jī)測試裝置等專用儀器進(jìn)行檢測.前一種方法測量精度低,可靠性不高;后一種方法精度較高,但實驗成本高,難以推廣適用.利用光電傳感器和力傳感器并結(jié)合軟件設(shè)計了一種多旋翼動力系統(tǒng)的測試平臺.該測試平臺利用杠桿原理,通過光電傳感器獲取當(dāng)前旋翼轉(zhuǎn)速,并通過杠桿原理在力傳感器上獲取力的數(shù)據(jù),通過力臂換算最終獲得動力系統(tǒng)在當(dāng)前轉(zhuǎn)速的升力槳轂力.最后根據(jù)轉(zhuǎn)速、升力和槳轂力的數(shù)據(jù),通過上位機(jī)進(jìn)行分析得到動力系統(tǒng)的升力系數(shù)以及槳轂力系數(shù),并建立PWM信號到轉(zhuǎn)速一階系統(tǒng)模型.測試平臺結(jié)構(gòu)簡單,測試精確,可以廣泛應(yīng)用于小型多旋翼飛行器動力系統(tǒng)參數(shù)的測定.
1 四旋翼無人機(jī)的動力學(xué)模型
四旋翼無人機(jī)是一種典型的欠驅(qū)動的控制系統(tǒng),它通過控制固定在4個對稱角上的由電機(jī)和螺旋槳構(gòu)成的轉(zhuǎn)子系統(tǒng)產(chǎn)生的升力來控制四旋翼無人機(jī)在6個自由度上的運(yùn)動[5].為了簡化四旋翼的動力學(xué)模型,做出以下假設(shè):首先,四旋翼的主體結(jié)構(gòu)為剛體且是對稱的.其次,螺旋槳具有固定的俯仰角.最后,四旋翼的質(zhì)心與其幾何中心重合,轉(zhuǎn)動慣量直接通過幾何中心來估計.典型四旋翼的坐標(biāo)系模型如圖1所示.圖1中給出了每個螺旋槳的升力、槳轂力、扭矩、角速度以及力臂.
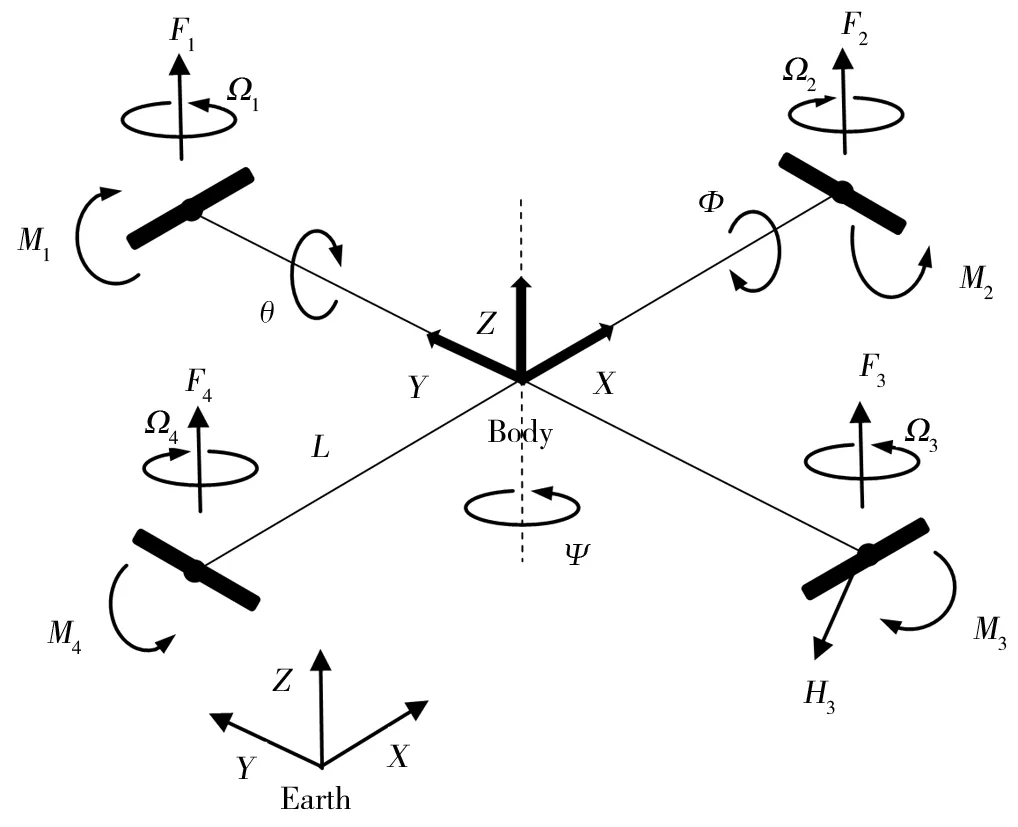
圖1 四旋翼坐標(biāo)系模型
根據(jù)動量理論,在理想狀態(tài)下四旋翼轉(zhuǎn)子i產(chǎn)生的升力Fi為
(1)
式中,Ct為升力參數(shù);Ωi為旋翼轉(zhuǎn)速;ρ為空氣密度;S為槳葉面積.又因為各個參數(shù)均為常數(shù),所以該方程可以簡化為
(2)
式中,Kt為歸一化后的升力系數(shù).同樣,可以得到四旋翼的槳轂力Hi為
(3)
簡化后的方程為
(4)
式中,Kh為歸一化后的槳轂力系數(shù).
同時根據(jù)電機(jī)模型[6]表現(xiàn)出來的非線性,建立從發(fā)送給電機(jī)指令的脈寬調(diào)制(Pulse Width Module,PWM)信號到旋翼轉(zhuǎn)速Ω的一階系統(tǒng)模型.
(5)
式中,u為PWM脈寬(us);Tm是時間常數(shù);Km是穩(wěn)定增益系數(shù).
2 四旋翼無人機(jī)的結(jié)構(gòu)參數(shù)
用Solidworks軟件構(gòu)建的四旋翼飛行器的三維結(jié)構(gòu)圖如圖2所示.模型的組成部分包括直流無刷電機(jī)、螺旋槳、碳纖桿、碳纖桿管夾、電池、Mega2560 Arduino開發(fā)板和碳纖維機(jī)身部分.碳纖維材料具有強(qiáng)度高、質(zhì)量輕等優(yōu)點,非常適合作為小型多旋翼飛行器的構(gòu)成材料.同時根據(jù)構(gòu)建的三維結(jié)構(gòu)圖,可以直接在Solidworks中對四旋翼結(jié)構(gòu)和轉(zhuǎn)子的慣性質(zhì)量矩進(jìn)行求解.
四旋翼參數(shù)如表1所示.由表1可知,通過Solidworks求解出的關(guān)于機(jī)體X軸、Y軸和Z軸的慣性矩Ix、Iy、Iz以及整個四旋翼的總質(zhì)量m,各個轉(zhuǎn)子到機(jī)體中心的距離L.

圖2 四旋翼三維結(jié)構(gòu)

參數(shù)數(shù)值單位參數(shù)數(shù)值單位Ix5.216e-2Kg·m2L352.76mmIy2.628e-2Kg·m2M1.597KgIz7.457e-2Kg·m2
3 升力系數(shù)和槳轂力系數(shù)測定系統(tǒng)設(shè)計
3.1 升力系數(shù)測定裝置設(shè)計
為了簡單有效地對單個轉(zhuǎn)子系統(tǒng)的升力系數(shù)進(jìn)行標(biāo)定,設(shè)計了測試平臺.升力系數(shù)測試裝置三維結(jié)構(gòu)設(shè)計如圖3所示.
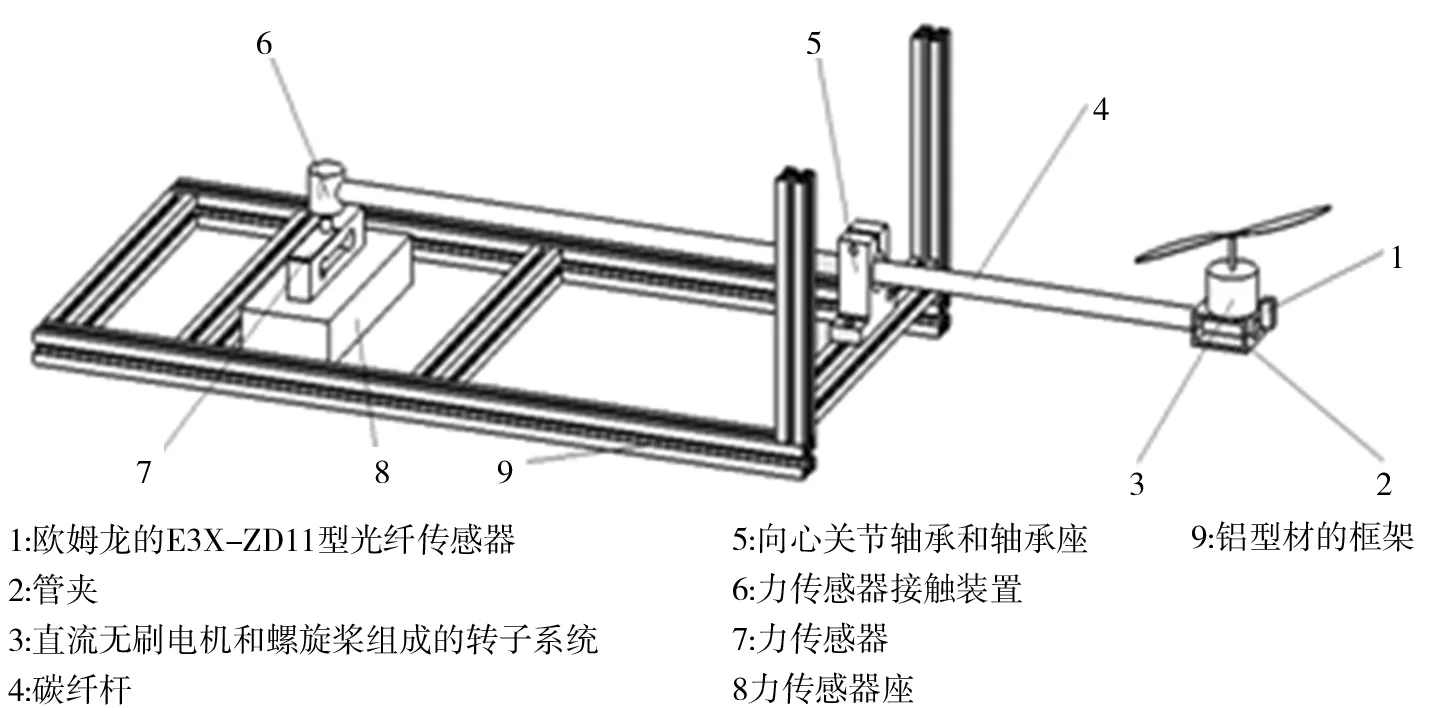
圖3 升力系數(shù)測試裝置三維結(jié)構(gòu)設(shè)計
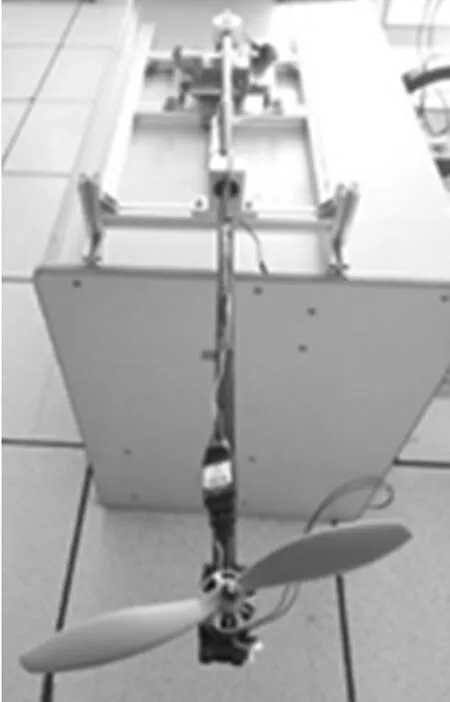
圖4 升力系數(shù)測試裝置
實驗裝置搭建如圖4所示.由圖4可知,測試平臺利用杠桿的原理,通過中間的向心關(guān)節(jié)軸承實現(xiàn)杠桿原理的測量.其中光電傳感器固定在碳纖桿的管夾上,并使其紅外發(fā)射和接收端口處在螺旋槳的半徑范圍內(nèi).所用力傳感器的精度為0.01 g,量程為1 000 g,可以滿足測量需求.Arduino開發(fā)板在3號引腳上產(chǎn)生占空比可調(diào)的PWM信號驅(qū)動電機(jī)和螺旋槳旋轉(zhuǎn),同時光電傳感器輸出脈沖信號并通過示波器進(jìn)行顯示,通過計數(shù)脈沖個數(shù)即可通過公式得到旋翼的當(dāng)前轉(zhuǎn)速,最后分析得到相關(guān)的升力系數(shù).
3.2 槳轂力系數(shù)測定裝置設(shè)計
為了更好地對單個轉(zhuǎn)子系統(tǒng)產(chǎn)生的槳轂力進(jìn)行測試,對升力系數(shù)測定裝置進(jìn)行了一定的改進(jìn),從而使其可以進(jìn)行槳轂力系數(shù)的標(biāo)定實驗.測試裝置設(shè)計如圖5所示.由圖5可知,通過引入另一個直流無刷電機(jī)和旋翼,并將它們橫向放置,根據(jù)正反槳的工作原理,兩個旋翼轉(zhuǎn)動時產(chǎn)生的升力將相互抵消,同時左邊的旋翼產(chǎn)生向下的槳轂力,右邊的旋翼產(chǎn)生向上的槳轂力,這樣就可以在力傳感器上獲得相關(guān)力的數(shù)據(jù),并通過杠桿的原理進(jìn)行力臂的換算,最終得到槳轂力的大小.實驗裝置搭建如圖6所示.
3.3 實驗測試
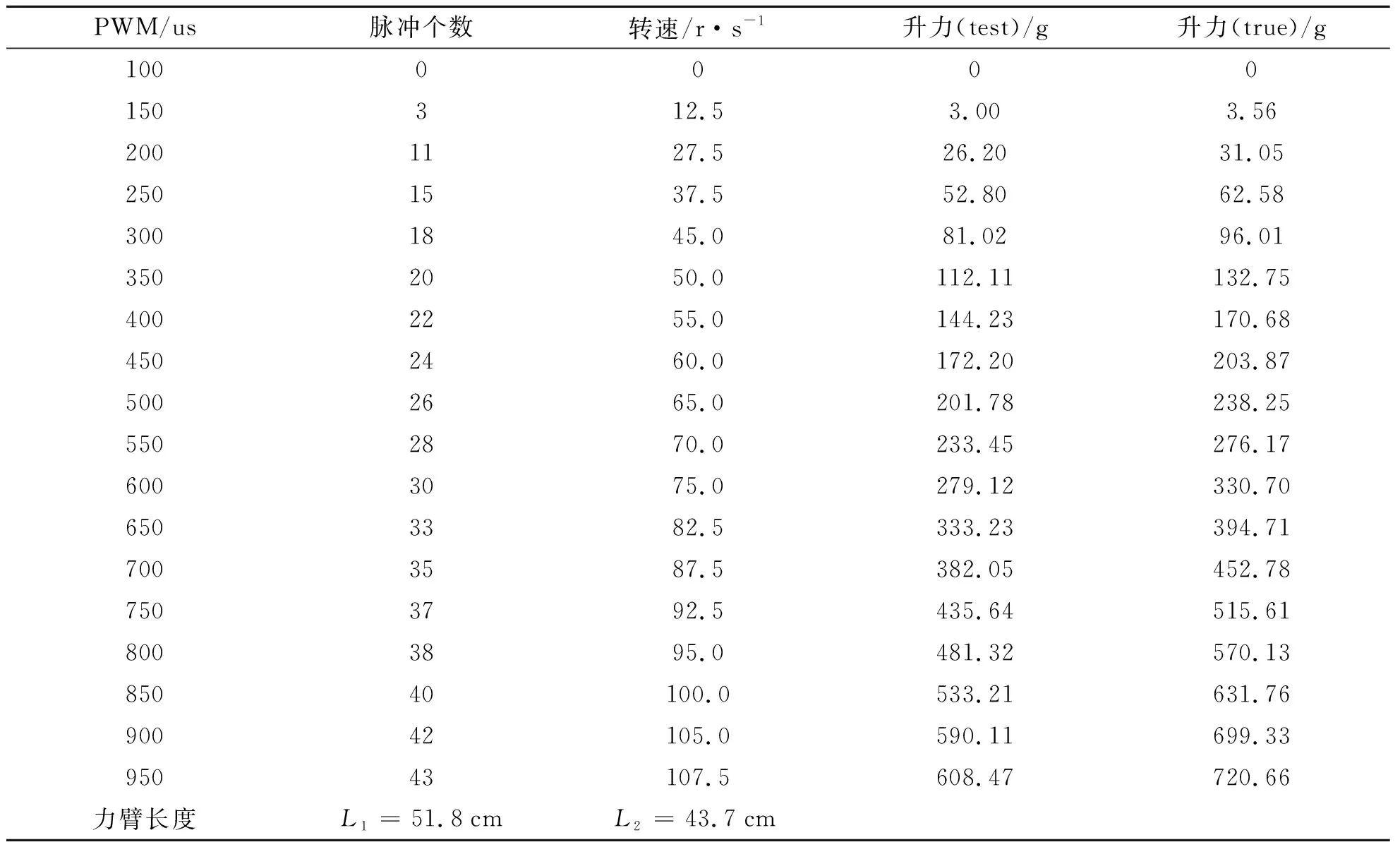
表2 升力系數(shù)測試數(shù)據(jù)
通過升力系數(shù)測定裝置進(jìn)行實驗得到的結(jié)果如表2所示,轉(zhuǎn)速數(shù)據(jù)可以根據(jù)轉(zhuǎn)速計算公式得到.
(6)
式中,c為接收到的脈沖個數(shù);p為葉片數(shù);ts為時間間隔.研究中p=2,ts=200 ms.而升力可以根據(jù)杠桿原理得到
Fttest·L1=Ft(true)·L2,
(7)
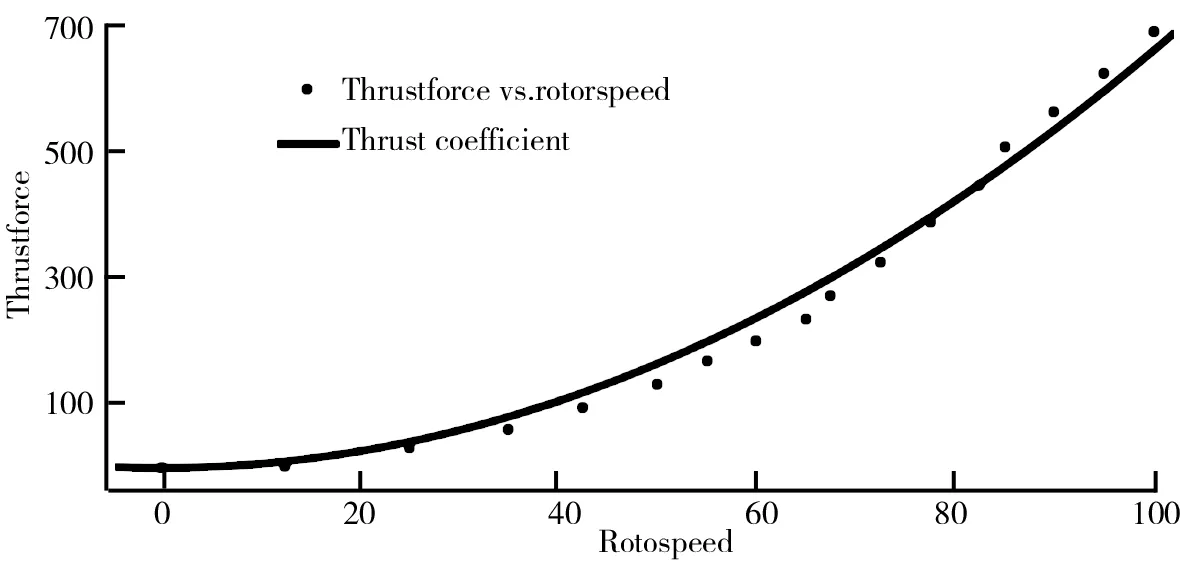
圖7 轉(zhuǎn)速-升力擬合曲線
將得到的轉(zhuǎn)速數(shù)據(jù)和升力數(shù)據(jù)輸入到Matlab的工作區(qū),并利用Matlab的Curve Fitting tool進(jìn)行轉(zhuǎn)速-升力的曲線擬合.根據(jù)式(2)及式(4),對其進(jìn)行二次擬合,得到轉(zhuǎn)速-升力擬合曲線如圖7所示.根據(jù)Matlab給出的擬合結(jié)果可以看出,R-square項越接近1表示擬合效果越好,經(jīng)由Matlab可以得到該曲線的R-square項為0.988 2,說明曲線的擬合效果較好,可以很好地表達(dá)兩組數(shù)據(jù)之間的函數(shù)關(guān)系.同時根據(jù)擬合曲線可以得到升力系數(shù)K_t的值為0.066 82.轉(zhuǎn)速—升力的二次擬合方程為:
(8)
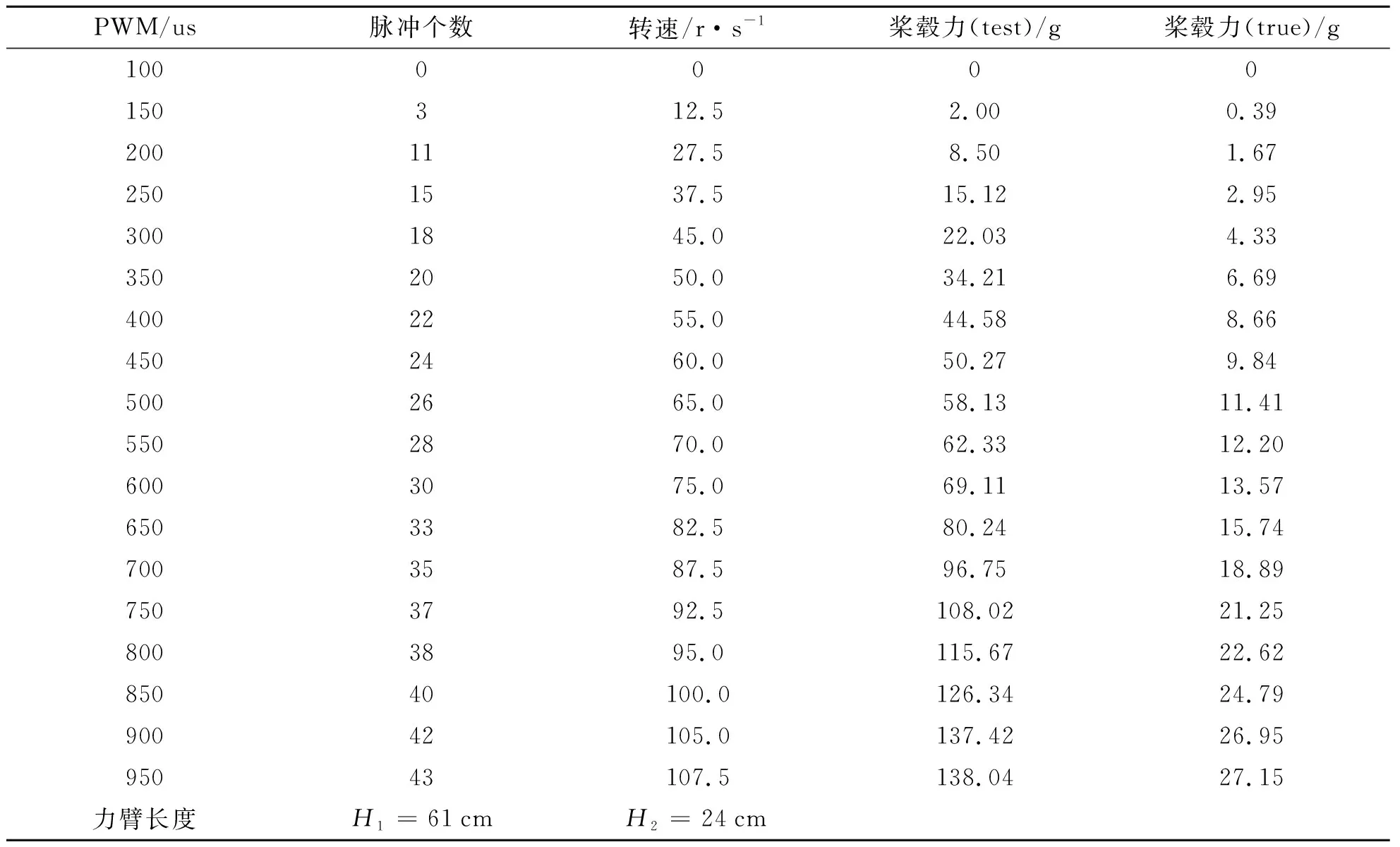
表3 槳轂力系數(shù)測試數(shù)據(jù)
通過槳轂力系數(shù)測定裝置進(jìn)行實驗得到的數(shù)據(jù)如表3所示,根據(jù)杠桿原理可以得到:
Fh(test)·H2=2Fh(true)·H1,
(9)
從而獲得實際槳轂力的大小,結(jié)合獲得的轉(zhuǎn)速數(shù)據(jù),通過Matlab進(jìn)行二次擬合可以得到.轉(zhuǎn)速-槳轂力擬合曲線如圖8所示.根據(jù)圖8給出的擬合結(jié)果可以得出R-square等于0.991 6,說明二次擬合可以很好地表達(dá)轉(zhuǎn)速和槳轂力之間的函數(shù)關(guān)系,并可以得到槳轂力系數(shù)Kh為0.002 684.所以,轉(zhuǎn)速-槳轂力的二次擬合方程為:
(10)
3.4 轉(zhuǎn)速測量
上文提到了利用光電傳感器的特性通過接收脈沖信號來進(jìn)行轉(zhuǎn)速的測量.具體的測量過程是通過將光電傳感器接收到的信號輸入Mega2560 Arduino開發(fā)板的2號引腳,再通過Arduino開發(fā)板將數(shù)據(jù)處理后發(fā)送到串口,這時可以通過Matlab軟件進(jìn)行程序的編譯使其可以讀取發(fā)送到串口的數(shù)據(jù)并進(jìn)行實時的繪圖,這樣就可以得到實時傳輸過來的轉(zhuǎn)速數(shù)據(jù).
PWM信號和轉(zhuǎn)速信號關(guān)系如圖9所示.由于光電傳感器的讀取誤差,發(fā)送到串口的數(shù)據(jù)存在一定的波動,這里取兩個峰值的平均值作為當(dāng)前旋翼的轉(zhuǎn)速.由圖9可知,每當(dāng)增加50 us的PWM信號時,轉(zhuǎn)速的提升需要60 ms的穩(wěn)定時間,因此可以求得其時間常數(shù)Tm為60 ms.根據(jù)公式:
(11)
結(jié)合采集到的轉(zhuǎn)速與PWM信號數(shù)據(jù),通過計算得到穩(wěn)定增益系數(shù)km為0.275.因此可以建立如下的PWM信號到轉(zhuǎn)速的一階系統(tǒng)模型:
(12)
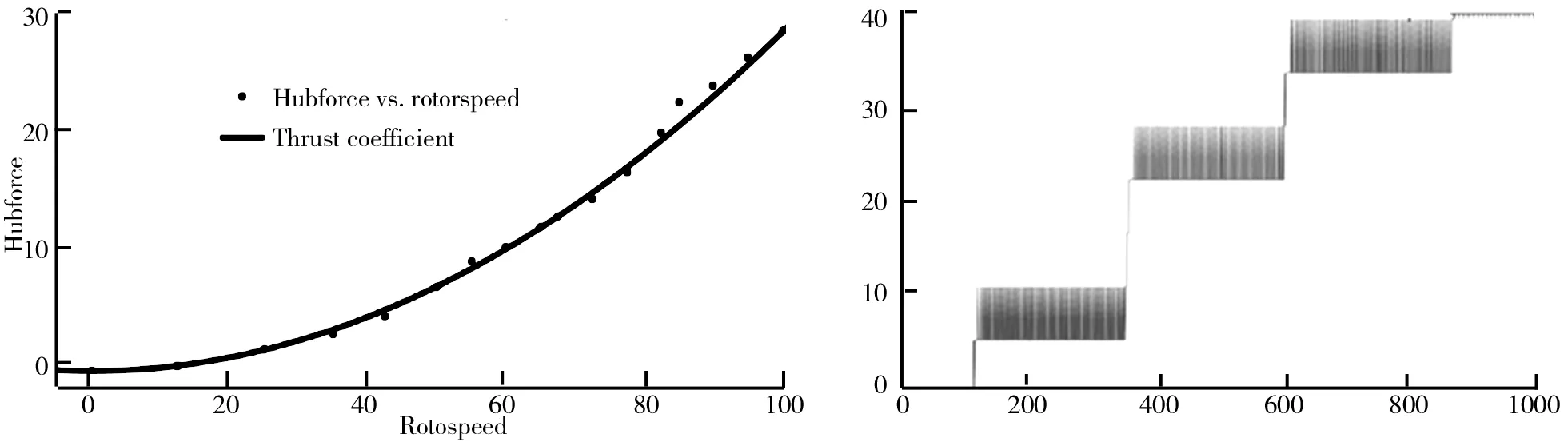
圖8 轉(zhuǎn)速-槳轂力擬合曲線 圖9 PWM信號和轉(zhuǎn)速信號關(guān)系
4 結(jié)論
通過SolidWorks設(shè)計了一種四旋翼的三維模型,并對其結(jié)構(gòu)參數(shù)進(jìn)行求解.研究開發(fā)了一種通過Arduino結(jié)合Matlab實時檢測轉(zhuǎn)速[7-8],并通過力傳感器和杠桿機(jī)構(gòu)對轉(zhuǎn)子系統(tǒng)產(chǎn)生的升力和槳轂力進(jìn)行測定的實驗平臺.通過該實驗平臺可以得到當(dāng)前轉(zhuǎn)子系統(tǒng)的升力系數(shù)、槳轂力系數(shù)、PWM和轉(zhuǎn)速的關(guān)系,從而對小型多旋翼無人機(jī)的動力系統(tǒng)進(jìn)行標(biāo)定.該實驗平臺可以有效地對小型多旋翼無人機(jī)的動力系統(tǒng)參數(shù)進(jìn)行測定,并具有一定的穩(wěn)定性和準(zhǔn)確性,為多旋翼無人機(jī)的前期設(shè)計工作提供了數(shù)據(jù)支持,有效地解決了多旋翼無人機(jī)在飛行過程中無法準(zhǔn)確地對其動力系統(tǒng)參數(shù)進(jìn)行測量的問題.實驗裝置也存在一定的不足和需要改進(jìn)的地方.實驗采用一維力傳感器,存在一定的測量精度問題,影響了測量的準(zhǔn)確性,以后可以考慮加入二維或者三維力傳感器來提高測量精度.
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55