基于51單片機的金屬探測全方位移動智能小車
2018-12-06 06:17:50西北民族大學徐啟明
電子世界 2018年22期
西北民族大學 徐啟明
隨著電子技術、計算機技術和制造技術的飛速發展,智能化產品在現代社會顯得日趨重要,它是今后發展的方向,可以在事先預定的程序下執行一系列的命令,無需人為進行管理,便可以完成預期所要達到的目標。金屬探測全方位智能小車的設想在此情況下便應用而生。它以智能小車為載體代替人工,在某一區域自動進行循跡避障或遙控并智能的檢測出金屬物質然后作出反應。
1 引言
智能小車,也稱輪式機器人。此項目是基于51單片機,采用STC89C52芯片制作的一輛集紅外遙控,藍牙遙控,自動循跡,躲避障礙,全方位移動,金屬探測等為一體的智能小車。
2 系統組成
此車由51單片機,電機驅動,穩壓,電源,紅外,藍牙,超聲波,電機,LCD1602,金屬探測器,遙控器等模塊組成。穩壓模塊為單片機提供穩定的5V電壓,驅動模塊為使能驅動電機,紅外循跡模塊可使小車智能循跡,紅外遙控、藍牙遙控為小車的兩種控制方式,超聲波可測距避免障礙,而金屬探測器可探測金屬讓1602顯示并報警。
本設計采用STC公司生產的STC89C52芯片,它是一種低功耗、高性能的8位微型控制器,它的存儲器有8K字節,對于處理一般不太復雜功能的能力足夠,從而使得STC89C52芯片為許多嵌入式控制系統提供靈活有效的解決辦法。(陳海宴.51單片機原理及應用[M].北京航空航天大學出版社,2010)

圖1 系統組成
3 金屬探測器原理
如圖1,由線圈L1、L2,三極管Q1,電阻R1,電容C2、C3,電位器W組成了一個高頻振蕩電路,通過調節可調電阻W,就可以改變振蕩級的放大倍數,使得振蕩器振蕩狀態處于臨界狀態,也就是說在未檢測到金屬前剛好未使振蕩器起振。Q2、Q3兩個三極管組成一個檢測電路,未檢測到金屬時,此時振蕩電壓會大于0.5V,C4就會由于Q2三極管在負半周導通而短路,從而使Q3三極管截止;當線圈L1有金屬物體靠近時,在金屬導體中就會有渦電流產生,此時振蕩回路中的能量損耗就會增大,使得正反饋減弱,振蕩器振蕩減弱,Q2三極管截止,電阻R2給C4電容充電,使得Q3三極管導通,蜂鳴器兩端電壓增大,從而使蜂鳴器發出聲音。我們根據蜂鳴器是否鳴叫,便可以判斷線圈周圍是否有金屬物體了。(范麗珍,李樹華.基于單片機的智能型金屬探測器的設計[J].內蒙古大學學報(自然版),2006,37(2):185-189)
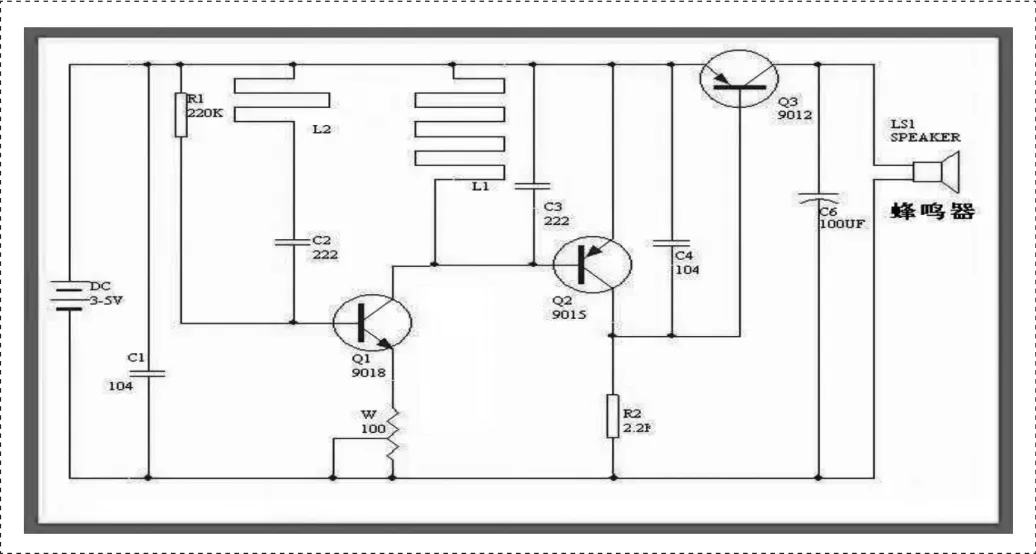
圖2 金屬探測器原理圖
在蜂鳴器的兩端引出兩根線,作為輸出電壓接入IN1(+)和IN1(-),在VCC和GND接一固定電壓。當輸入電壓低于固定電壓時,OUTPUT1輸出高電平,當輸入電壓高于固定電壓時,OUTPUT1輸出低電平。OUTPUT1中輸出的電平高低可作為信號傳回單片機的IO口,從而使單片機能判斷線圈中是否有金屬。
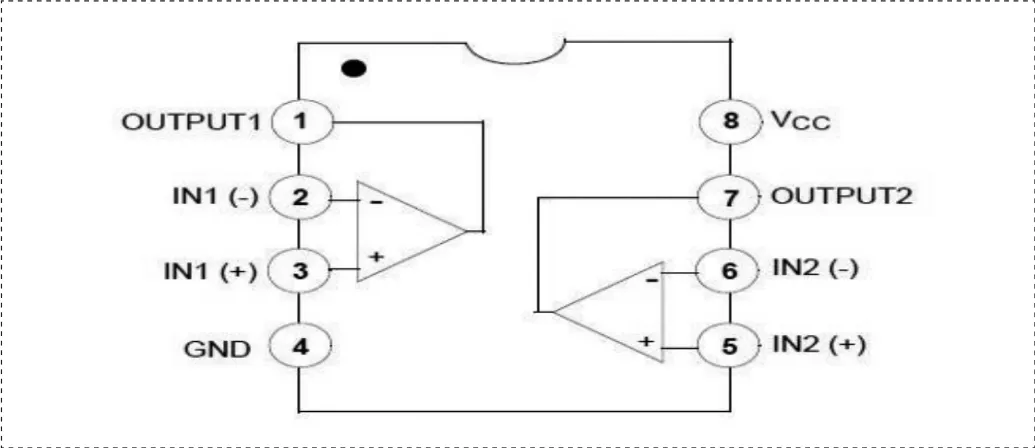
圖3 LM393電壓比較器
4 麥克納姆輪
麥克納姆輪是瑞典麥克納姆公司的專利。基于麥克納姆輪的全方位運動小車可以實現前進、斜行、橫移、原地旋轉及其組合等運動形式。(葉長龍,馬書根,回麗.一種全方位移動機器人[J].中國科學:信息科學,2011,41(2):181-189)
麥克納姆輪分為A、B輪,輪子的安裝方式從左到右、從上到下依次為BAAB。如果4個輪子均為正轉,則小車為前進,如圖4所示,反之,則為后退;如果輪子依圖5方式轉則為右移,反之為左移;依圖6方式轉(只有B輪正轉)為斜向右前,反之斜向右后,若只有A輪正轉則為斜向左前,反之為斜向左后;依圖7為原地右轉,反之為原地左轉。(李磊,葉濤,譚民,陳細軍.移動機器人技術研究現狀與未來[J].機器人,2002,24(05):475-477)
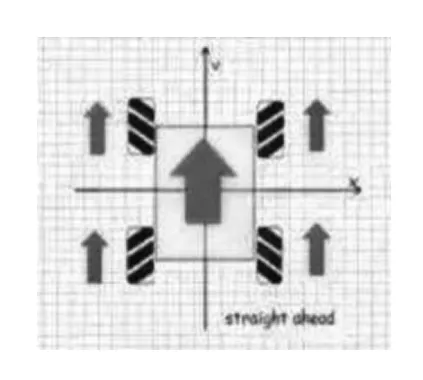
圖4 前進
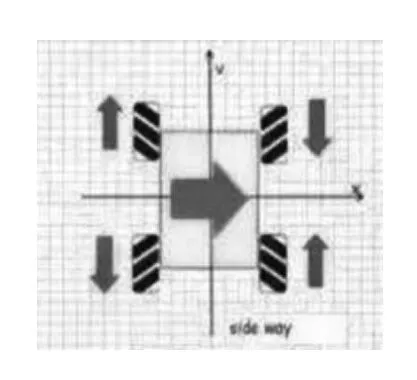
圖5 右移

圖6 斜向右前
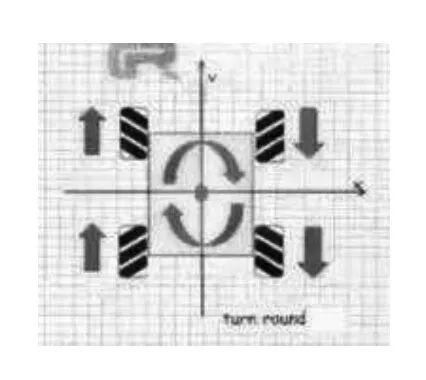
圖7 原地右轉
5 遙控裝置
5.1 紅外遙控
紅外接收模塊傳感器采用HX1838,靈敏度高,工作電壓為5V,以數字量的形式輸出。
遙控器采用UPD6122控制芯片NEC編碼格式,它的控制范圍為7-9米左右(中間是否有障礙物,紅外接收頭本身的質量等因素會影響到遙控的距離),紅外載波頻率為38KHz,使用3V扣式鋰錳電池,有效壽命達20萬次以上。
5.2 藍牙遙控
藍牙模塊使用HC-06從模塊,它的IO口共有4個,分別為VCC,GND,TXD,RXD。VCC端口接5V電壓。TXD為數據的發送端口,RXD為數據的接收端口。
LED燈顯示藍牙的連接狀態,如果是閃爍狀態表示沒有藍牙連接,隔秒連續閃爍兩次表示藍牙已連接。空曠地有效距離10米。
該模塊為從機,從機可以和其他帶藍牙功能的藍牙主機、電腦、帶藍牙的手機等智能終端進行配對,從機之間則不能進行配對。(居聰,曹中忠,張勇,等.基于單片機的空調智能控制器的設計[J].軟件,2014(6):34-38)
6 結論
本實驗項目通過紅外、藍牙、金屬探測、超聲波等模塊的制作,然后將他們組合在一起,并在51單片機的協調控制下,實現手動遙控、自動避障、探測金屬等功能。
此金屬探測小車還有很大的改進完善空間。例如:改進金屬探測模塊,使其能夠分辨金屬的種類并且具有更大的探測范圍;改進循跡避障功能,使其在無人干預的情況下更智能的進行判斷行走。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04