對比度閾值函數修正對于NVThermIP模型的影響?
2018-12-09 11:01:38吳元慶王洋張延濤張宇峰劉春梅
物理學報 2018年21期
吳元慶 王洋 張延濤 張宇峰 劉春梅
1)(渤海大學新能源學院,錦州 131012)2)(西北機電工程技術研究所,咸陽 712099)(2018年3月20日收到;2018年8月2日收到修改稿)
NVThermIP模型作為經典的性能模型,在指導紅外系統參數的設計優化方面略有不足,因此需要構建更科學合理的綜合評估模型.在經典模型基礎上,結合人眼噪聲的理論和實驗研究,利用噪聲等效溫差修正了系統的對比度閾值函數.并利用現有的紅外系統實驗數據,對修正后的模型進行圖像模糊和不同距離下辨識兩方面驗證,結果證明該模型具有很高的預測精確度,可為新型系統設計分析提供可靠的依據和理論指導.
1 引 言
紅外成像技術的發展日趨成熟,在軍品、民品中的應用也越來越普遍.但是新技術的出現、工作環境的改變都對紅外成像系統提出了嚴格的要求,而且軍用領域的敵方干擾破壞、民品中的環境刺激,都對紅外探測系統的探測能力和生存環境等提出了更高的要求[1].因此,迫切需要一個準確的評估系統,既可以做出性能預測,又可以根據模型情況進行優化調整.性能模型法是評估系統中應用最廣泛的方法,使用該方法既可以降低軍用武器系統的損耗,又能精確、高效地完成評估任務,成為人們研究的熱點[2,3].
NVThermIP模型是目前美國軍方認可的性能模型,并作為行業標準而受到廣泛關注[4],無論軍用還是民用領域,其應用效果都非常顯著.但是在指導系統設計方面,NVThermIP模型還稍顯不足,無法提供對于系統參數的優化指導,一系列重要的性能參數也無法準確給出,因此需要對其進行改進和修正[5,6].
對紅外系統而言,最大的干擾一般來自于噪聲,噪聲越小,系統探測的靈敏度和準確度就會越高[7].噪聲等效溫差(noise equivalent temperature difference,NETD)是衡量紅外探測器性能的主要指標之一,曾有人提出將其引入到經典NVTherm-IP模型[8]中,用于指導系統設計.然而該方法僅是用NETD參數替換了模型中的其他參數,并引入修正系數加以調整,缺乏理論上的依據,說服力不足.
人眼視覺作為一個特殊的系統,其運行機制已經被證明無法用NVThermIP模型完全解釋,大量實驗數據也證明該模型存在一系列的缺陷[9].NVThermIP模型中關于人眼的噪聲機制多采用經驗值和估計值進行量化處理,在對比度閾值函數的建立中,采用Weber理論的經驗常數α和顯示器亮度水平進行描述,僅適用于顯示器亮度不高的情況,沒有完全考慮顯示器幀頻的差異對人眼系統的噪聲影響,使得該模型的預測結果不夠精確和可靠[10].
本文在人眼噪聲理論的基礎上,利用NETD結合經典理論模型,修正了NVThermIP模型中的系統對比度閾值函數.通過與現有實驗數據的對比,證明了修正后的模型既可以準確地描述所獲得圖像的模糊效果,又可以對野外現場的紅外預測進行準確判斷,從而證明該模型有效.
2 NVThermIP模型中的系統對比度閾值函數修正
2.1 系統對比度閾值函數修正
作為理想的圖像傳感器,人眼系統辨識圖像的能力取決于成像系統輸出的圖像質量,而對于紅外系統的設計,需要對人眼視覺建立高度精確的理論模型[11,12].NVThermIP模型綜合考慮了人眼的結構、眼球的震顫以及人眼濾波器模型等綜合性能,對人眼視覺的描述基本清晰[13].但是經典的NVThermIP模型是基于Johnson準則建立的,采用極限頻率作為預測紅外系統性能的依據,沒有考慮系統的靈敏度和信號傳遞過程,對于紅外系統的噪聲影響沒有充分考慮,從而會導致預測錯誤[14?16].
在此基礎上,Vllmerhausen等[17]提出了目標任務性能(targeting task performance,TTP)準則,該準則認為人眼獲取到的視覺信息主要來源于圖像中大于人眼視覺閾值的信號.因此,模型建立過程中,可以利用系統對比度閾值函數(CTFsys)來取代原模型中的最小可分辨溫差函數,表明人眼在一定的目標背景尤其是紅外圖像下的目標信號分辨能力,從而可用于指導紅外系統設計.
NVESD實驗室基于TTP準則建立的NVThermIP性能評估模型,通過對比度和臨界尺寸來描述目標特性,可以用于不同模糊程度圖像的預測和辨識以及不同觀測距離、不同背景下的圖像識別[18].該模型在建立過程中,充分考慮了紅外成像系統、光學信號傳輸以及圖像顯示過程中的模糊及模糊的傳遞,綜合考慮噪聲的影響并引入系統調制傳遞函數(MTFsys),得到了考慮模糊效應和噪聲的系統對比度閾值函數(CTFsys),

其中,α是人眼噪聲與顯示器亮度的比值,是成像系統的噪聲功率[19].
一般而言,人眼對于圖像中目標信號的感知和獲取,主要來自于信號與背景的對比度,而與圖像本身的亮度關系很小,因此對比度閾值函數的建立至關重要[20].但是,該方法基于Weber定律,在對比度閾值函數的計算上認為人眼噪聲與顯示器亮度成正比,比值α一般取經驗常數169.6.對于復雜的人眼系統,這種簡化具有明顯的局限性,而且該模型并沒有充分考慮分辨力和靈敏度對于成像系統的影響.
基于上述研究,綜合考慮紅外成像分辨效果和系統反應速率的現場性能情況,結合人眼視覺的最新理論成果[21].本文提出,利用NETD重新構建CTFsys,進而修正和完善經典的NVThermIP模型.
利用紅外成像系統中的噪聲理論,將描述靈敏度的參數NETD表述為系統噪聲N的度量方法,進一步將紅外系統的噪聲部分N轉換成顯示系統噪聲σdisp.同時,通過最新的視覺模型得到人眼噪聲σeye,替換原始模型中由亮度和經驗常數決定的部分,進而將NETD科學地應用到NVThermIP模型中,使其表述更準確.修正后的系統對比度閾值函數表達式為

其中,ξ是一維方向空間頻率,SMAG是系統放大率.
2.2 人眼內部的生理噪聲
最新人眼視覺的噪聲模型認為[22],人眼視覺的噪聲主要包括兩方面:一是由大腦決策信號產生的決策噪聲,二是由外部光學信號造成的光子噪聲.光子噪聲部分受亮度影響,人眼噪聲表達式為

式中,σdec為決策噪聲,其數值需要通過視覺實驗獲得;σph為光子噪聲,主要由人眼受到外界光學信號的影響而產生,光學信號的亮度不同時光子噪聲也不同.光子噪聲的計算公式為

其中,Apup為人眼瞳孔的面積,可通過測量瞳孔尺寸計算得到,瞳孔尺寸單位取mm;k為光子噪聲的修正系數,通過實驗數據統計,本文取值0.02;Qeye,t為人眼時域帶寬.
人眼時域帶寬的表達式為

其中,f為時域頻率;MTFeye,t為人眼的時域傳遞函數,其值與人眼接收到的光強有關,光強不同,暫留時間τeye也有所變化,通常亮度為70 fL時,視覺暫留時間約為200 ms.人眼的時域傳遞函數計算表達式為

2.3 人眼感知到的成像系統噪聲
NETD的定義表達式[8]為

其中,F為整個光路的光圈系數;τoptics為光路中光的透過率;p為探測器像元中心距;FF為探測器的占空比;QE為探測器量子效率;Tint為幀周期;ηi為電荷轉移效率;參數C的表達式為

其中,M(λ,TB)為普朗克公式,TB是背景溫度.
將NETD應用到NVThermIP模型中,需要結合光譜輻射對其進行轉換,轉換成紅外成像系統的圖像噪聲,即N模型,具體的計算方法為


其中,L(λ,T)為黑體的光譜輻射亮度;C1和C2分別為第一和第二輻射常數,值分別為C1=3.741844×108W·μm4/m2,C2=1.438769×104μm·K;V為人眼視覺效能,本文在建模中取最佳值683 lm/W;R為轉換常數,其值由光亮度單位之間的轉換關系決定,本文在建模中取值為0.2919 L/Nit.
人眼最終感知到的成像系統噪聲為

其中,Qeye,s是人眼空間域帶寬,Qdisp+eye,t是成像系統和人眼的時域帶寬.
3 實驗結果與數據分析
基于上述的修正模型,使用MATLAB對該模型進行建模、仿真和有效性驗證.主要從如下兩方面展開研究:1)實驗一,借助權威機構的圖像模糊實驗數據,對該修正模型的分辨能力進行驗證;2)實驗二,借助實驗數據,驗證修正模型的目標獲取性能.
1)實驗一
實驗數據來自于2004年美國雷達電子技術研究所進行的目標辨認實驗,該實驗的主要目的是對不同車輛和人物的辨認情況進行分析.本文使用的實驗數據主要是關于車輛辨識[13]的部分,辨識的目的在于觀察者能夠分辨出目標車輛的類別,數據包含12種不同類型的車輛,又分別從前后左右等12個不同的角度對每輛車加以辨識,所以共有144幅圖像,如圖1所示.

圖1 辨認實驗的目標圖像 (a)不同的目標車輛;(b)同一車輛12個角度圖Fig.1.Target image of the experiment:(a)Different target;(b)different perspectives of the same vehicle.
將144幅圖像分成6組,每組都包含12種不同車輛的兩個不同角度的辨識圖像,采用高斯模糊對這6組圖像進行不同的模糊處理,模糊程度如表1所列.由于圖像的模糊程度決定了圖像的清晰度,因此可以認為圖像的辨認程度隨著模糊程度的提高而逐漸降低,不同模糊效果的圖像如圖2所示.將最終的模糊效果交由觀察者進行辨識,對不同模糊程度的圖像分辨率進行統計和比較分析.高斯模糊函數的空間域表達式為

其中,b是模糊尺寸,其值越大代表圖像模糊程度越嚴重;x是圖像的一維空間坐標;s是歸一化因子.

表1 6組圖像對應的模糊尺寸Table 1.Fuzzy size corresponding to 6 groups.
模型的建立過程中,將模糊函數通過傅里葉變換,轉變成頻域表達式,并應用到紅外系統中,作為系統的調制傳遞函數,進一步將其用于NVTherm-IP模型中,結合紅外成像系統的設備參數和目標特性參數,建立修正后的NVThermIP模型.將該模型應用于現場性能預測,得到獲取目標圖像分辨率不同時的辨認概率PID,并通過目標辨認實驗的現場數據對模型進行驗證和比較分析.實驗所采用的目標特征參數如表2所列.
采用修正后的NVThermIP評估模型預測的結果如表3所列,可以看出,隨著圖像模糊程度的加深,目標的辨認概率逐漸下降,符合實際經驗,現場測試的結果也證明了該趨勢的正確性.從辨認結果上看,在模糊程度相對較低的A,B,C組中,實驗結果和模型預測結果趨勢一致,誤差相對較小.對于模糊程度較高的E組和F組,實驗結果和預測結果差別明顯,實驗結果中模糊程度更高的F組獲得的辨認概率為0.2041,竟然超過了模糊程度較低的E組(辨認概率0.1735).出現這種辨認結果與模糊程度相悖的情況,可能是由于測試觀察者的主觀原因,即對于不能分辨的圖像存在心理暗示和隨機記憶等,產生隨機判斷,使得辨認結果數據偏離預測分析.對于實驗中出現的E組和F組這種辨認概率和模糊程序相悖的情況,可以通過增多觀測人數、擴大模糊尺寸差距等方法加以改進和修正.該模型的總體誤差很小,約為0.0838,低于0.1,屬于可接受的正常誤差范圍.
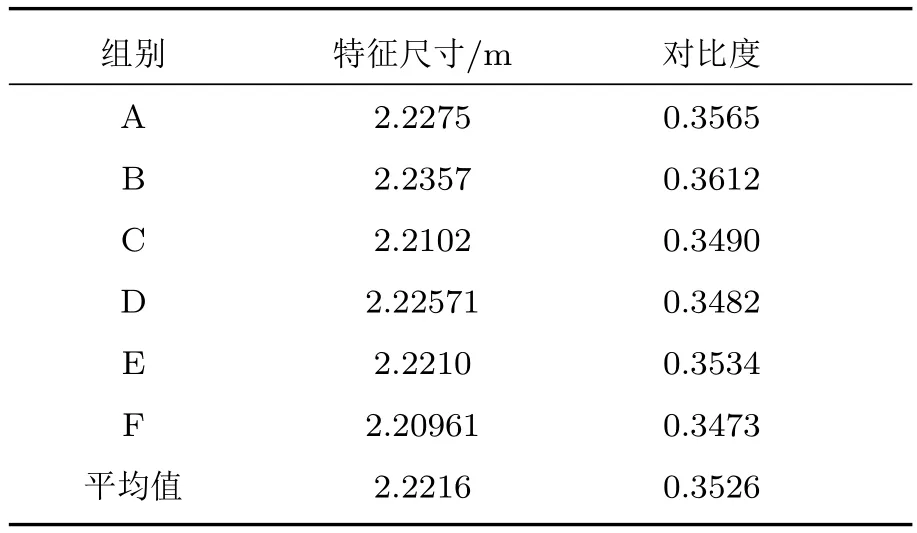
表2 目標特性參數Table 2.Target parameters.

表3 模型預測的辨認概率與實驗數據對比Table 3.Comparison of model prediction with experimental data.
為了進一步驗證該修正模型的正確性,對該模型進行調整,假設目標車輛的特征尺寸和對比度均為表2中數據的平均值,此時圖像辨認概率僅與圖像的模糊程度相關,建立仿真模型,進而得到在不同的模糊情況下,目標圖像被正確辨認出來的概率曲線,如圖3所示(表3中的模型預測值也來源于此).從圖3可以看出,該修正模型能夠很好地預測模糊圖像的分辨能力,隨著圖像的模糊程度從5,10 pixels,逐漸過渡到25,30 pixels,模型預測圖像的辨認概率直線下降,實驗數據也證實了這種情況,從趨勢上證明模型的正確性.同時,從預測數據結果上看,圖3中仿真實驗的預測結果與實際測試數據差距不大,除了前文所述的個別受主觀影響的數據以外,預測數據基本上都分布在實驗數據左右,說明該模型的預測結果大體能反映實驗數據的真實情況.

圖3 不同模糊程度下的目標辨認概率Fig.3.Target recognition probability under different degree of blurring.
為了更直觀地描述該模型預測結果的準確程度,本文以修正后模型的模糊辨認預測概率為橫軸,以辨認實驗的測試概率作為縱軸,構建坐標系,得到如圖4所示的離散數據分布圖.整個坐標系的對角線位置為預測數據和實驗數據相等的點,因此數據點越接近對角線,說明預測結果與實驗數據越相符.可以看出,本次仿真實驗得到的6個數據點均緊密附著在對角線兩側且差距較小,從另一個側面說明修正后的NVThermIP模型預測數據的準確性,證明該模型的預測效果可以用于指導實驗.

圖4 模型預測結果和實驗數據的關系圖Fig.4.Relationship between model prediction results and experimental data.
2)實驗二
借用美國夜視實驗室的實驗數據對修正后的NVThermIP模型進行可靠性驗證,該實驗是關于軍事設備的夜視圖像處理,主要是坦克戰車的不同角度、不同距離的紅外圖像,目標圖像如圖5所示,圖中共有11種不同類型的戰車.實驗共有20個觀測者,在5個不同的觀測距離對坦克的夜視圖像進行型號辨認,并通過圖像辨認效果最終確定紅外成像系統的工作效果.本文利用該實驗數據對修正后的模型進行驗證,通過與真實實驗數據的比較分析,來確定該模型在夜視現場中的性能是否可靠.

圖5 11個同類目標Fig.5.Illustration of the eleven targets.
紅外系統的設備參數如表4所列,所有目標參數取相同數值,特征尺寸(Ltgt)取值3.1 m,平均對比度(Ctgt)取值0.35,無外部噪聲.

表4 紅外系統參數Table 4.Parameters of infrared system.
將上述紅外系統的性能參數、觀測目標的特征參數以及觀測距離等實驗參數輸入到修正后的NVThermIP模型,并利用該模型進行性能仿真,得到觀測者在不同觀測距離下用紅外設備正確辨認出目標型號的概率,與實際實驗數據進行對比,結果如圖6所示.
由經驗可知,隨著觀測距離的增大,目標圖像的辨認概率會逐漸下降,仿真和測試結果均證明了這一點.由圖6可知,隨著觀測距離的變化,仿真和測試實驗結果的變化趨勢相同,可見修正模型的預測結果與實際測試結果符合得很好,兩者的數據相差較小.為了進一步分析該模型的有效性,在不同距離的測試數據點標注0.05誤差棒用于確定仿真實驗與測試實驗的誤差.可以看出,修正模型的預測結果基本上都在測試實驗數據附近,仿真實驗的誤差均遠小于0.05.同時,在特定觀測距離,約為1.5 km時,仿真實驗的辨認結果和測試結果基本相等,誤差很小,從而進一步證明該修正模型的精確性.對仿真數據進一步分析處理得到該修正模型與實驗結果之間的均方根誤差,僅為0.03,從而可以證明該模型對于圖像辨識能力的預測非常準確,可以用于不同距離下紅外系統辨識度的精確預測.
同樣,為了更直觀地描述該模型對不同距離下預測結果的準確程度,以修正模型的模糊辨認預測概率為橫軸,以辨認實驗的測試概率為縱軸,構建坐標系,得到如圖7所示的離散數據分布圖,位于對角線上的點是最接近真實數據的點.圖中接近坐標原點的兩個數據點基本處于對角線上,其他距離稍遠的3個點也與對角線相差不遠,更直觀地證明了該模型預測的辨認概率與實際測試結果非常接近,證明該模型可以對紅外系統進行有效的評估,并用于指導設計.

圖6 辨認概率與距離的關系Fig.6.Relationship between probability and distance.

圖7 預測數據與實驗結果的關系Fig.7.Relationship between prediction data and experimental results.
上述兩個實驗分別從圖形模糊程度和觀測距離兩方面對修正后的NVThermIP模型進行了性能驗證,通過與真實實驗結果對比,證明該模型在用于紅外系統的性能預測方面和野外實戰方面都是有效的,仿真結果與實驗數據契合度高、一致性強.同時綜合考慮了紅外系統和實際生產中的一系列性能參數,該模型完美地融入了人眼視覺機制,將NETD這一衡量靈敏度的參數引入到經典NVThermIP模型中,用于指導系統設計,從而為紅外系統的性能優化提供可靠的理論指導.
4 結 論
一個性能可靠的評估模型可以有效指導紅外成像系統的設計,是其性能優化的前提.紅外系統的設計需要綜合考慮其分辨力和靈敏度對系統的影響,因此需要將靈敏度度量參數NETD應用到性能評估模型中.在經典NVThermIP模型的基礎上,本文以指導系統設計作為研究切入點,分析建模過程中存在的不足,結合現有的人眼噪聲理論研究和實驗數據,利用NETD對NVThermIP模型的對比度閾值函數計算方法進行了修正與完善,將NETD轉化為成像系統噪聲,再轉化為人眼的感知噪聲,從而將NETD應用到NVThermIP模型中.并從圖像模糊程度和不同觀測距離下的紅外辨識兩方面對修正模型進行驗證,證明其具有高的準確率,可用于系統設計.修正后的NVThermIP模型對紅外成像系統的評估預測更為準確,可以有效避免實物實驗長周期、高消耗的缺點,對于系統的優化設計效率更高,具有重要的軍事和經濟意義.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19