長江口深水航道通航尺度核定測量精度研究
2018-12-10 05:02:42
水利水電快報 2018年11期
(1.上海海事測繪中心,上海 200090; 2.南京水利科學研究院,江蘇 南京 210024)
1 研究背景
1.1 長江口深水航道概況
長江口12.5 m深水航道(航道底寬350~400 m,總長約90 km)自2010年3月14日試通航以來,大幅提升了長江口水道的通航能力,已經逐漸成為大型船舶進出長江黃金水道的重要通道,也是唯一的通道。根據對長江口12.5 m深水航道近幾年通航船舶的統計可以看出,平均每天進出長江口12.5 m深水航道的船舶總數約127艘次[1]。
由于長江口同時受到上游流域下泄泥沙(包括本地灘地泥沙補給)和海洋漲潮流輸沙的雙重影響,12.5 m深水航道的年疏浚維護量已經達到7 500~8 000萬m3,人力、物力投入巨大,影響了深水航道經濟效益。
1.2 提高通航核定測量精度的意義
長江口深水航道通航尺度核定測量通常采用單波束月度檢測方式。《海道測量規范》3.4.3[2]以及《沿海港口航道測量技術要求》4.2.3[3]規定,水深在0~20 m,深度測量極限誤差為±0.3 m;《水運工程測量規范》8.1.6[4]規定,水深在0~20 m,深度測量極限誤差為±0.2 m。目前國內常用的水深測量設備精度均已滿足要求,但分米級的水深精度要求對于長江口深水航道來說仍不夠精細;假設全航道水深數據僅相差10 cm,對于疏浚企業來說,整個長江口深水航道的疏浚工作量約達到300多萬m3。因此,雖然水深數據均符合測量規范要求,但水深測量數據的精確與否,直接影響航運管理部門的通航決策、疏浚企業的生產經營以及業主的土方量核算。
1.3 影響因素及研究方向
影響長江口深水航道通航尺度核定測量水深成果數據精度的因素包括:定位精度、測深精度、實時潮位精度及其改正方法、實時聲速、涌浪、海底底質、換能器靜吃水變化、船舶動吃水變化等。
現代水深測量定位精度隨著RTK技術的成熟以及北斗CORS站的建設,已經實現了厘米級,測深精度、實時潮位精度也已實現厘米級,聲速剖面也能實時測得。因此研究分析重點應放在如何精確測定船舶換能器靜吃水及其變化方面,其他影響因素如船舶動吃水變化影響雖然也很重要,但留待以后作進一步研究。
2 船舶換能器靜吃水測定
2.1 船舶吃水
船舶吃水一般指船舶浸在水里的深度,船舶的底部至船體與水面相連處的垂直距離[5]。通過讀取標在船艏和船艉的水尺,可以確定船舶的吃水。根據船舶的運動狀態,船舶吃水又可分為靜態吃水(簡稱“靜吃水”)和動態吃水(簡稱“動吃水”)兩類。
換能器靜吃水不同于船舶靜吃水值,為測量船舶靜止狀態下換能器(單波束換能器或多波束換能器)中心到水面的垂直距離[6]。無論采用何種安裝方式測量船舶,其換能器靜吃水值一般不等于船舶靜吃水值,需要通過一系列方法進行測定。
2.2 必要性
影響水深測量數據精確性的因素很多,作為系統誤差的組成部分,能否精確測定船舶換能器靜吃水及其變化也是其中重要方面。測量船舶在作業過程中油、水的消耗或船舶經過補給后,都會引起船舶靜吃水變化;如果換能器靜吃水沒有及時調整,勢必會造成水深數據存在系統誤差,而水深數據的失真,又將會影響航道的通航、疏浚、工程結算等。
3 傳統換能器靜吃水及其變化測定局限性
3.1 傳統換能器靜吃水測定
為滿足海道測量規范、水運工程規范及沿海港口航道測量技術要求,傳統換能器靜吃水測定一般按下列步驟進行。
(1)測量船舶上排時,在岸邊建立閉合水準點控制網;
(2)在測量船舶左右舷各設置兩個觀測點并做明顯的標志以便長期使用;
(3)用全站儀分別觀測測量船舶上各個特征點并記錄三維坐標;
(4)計算左右舷觀測點(至少兩處)到換能器中心的高程差平均值g1,g2……;
(5)測量滿載船舶在水中處于靜止狀態下,用皮尺量左右舷各觀測點到水面的距離,讀數5次以上,取其平均值作為各觀測點凈空觀測值j1,j2……;
(6)得出測量船舶換能器靜吃水h1=g1-j1,h2=g2-j2……,如圖1所示;
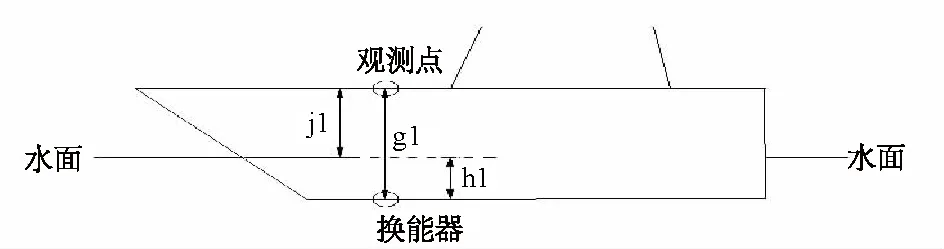
圖1 傳統換能器靜吃水測定示意
(7)取h1,h2……平均值作為測量船舶換能器最終靜吃水值[7]。
通過以上方法,選定應用于長江口深水航道通航尺度核定測量船舶A輪作為目標輪,經傳統方式測定其換能器靜吃水(見表1)。

表1 傳統方式測定測量船滿載情況下換能器靜吃水值 m
3.2 傳統換能器靜吃水變化測定
傳統換能器靜吃水變化通常采用校儀方式測定,雖然從嚴格意義上來講,傳統校儀方式均以假定換能器吃水比較準確為基礎,通過校儀方法來確定測區實際聲速值,然而隨著聲速儀測量聲速的便捷性和精確性提高,現有水深校儀更多是利用聲速儀結合水砣繩、皮尺、測深儀來測定換能器靜吃水變化。具體方法如下。
(1)到達測區,實測聲速值并設定到測深儀;
(2)通過皮尺和水砣繩比對,確定水砣繩伸縮變化并調整相應刻度;
(3)在不同深度段扔水砣估讀水深(因為水砣繩最小刻度為 0.5 m,需要讀取到 0.1 m);
(4)通過水砣繩估讀水深與測深儀實測水深比較,確定和調整換能器靜吃水值[7]。
3.3 測定及校儀的局限性
傳統換能器吃水測定及校儀方式均能滿足現行規范要求,在水深數據精度要求不高的水域,也仍在廣泛使用。但通過扔水砣方式校儀,存在很明顯的缺陷。
(1)因為要在不同深度段校儀,所以測定勢必要在測區進行,受風浪影響比較大。
(2)水砣繩最小刻度為 0.5 m,估讀到 0.1 m受人為因素影響較大。
(3)受海底底質、潮流、涌浪、船舶搖擺等因素影響,很難保證估讀到 0.1 m的精度。
鑒于此,傳統校儀的精度只能達到分米級別,而對厘米級別的吃水變化很難及時發現,尤其是在船舶非滿載情況下或者經過部分補給等情況下換能器靜吃水精確測定存在困難。

圖2 船舶靜吃水測量精度測定的基本流程
4 船舶換能器靜吃水測量精度測定
雖然長江口深水航道維護測量是采用單波束測量,但測量船舶換能器靜吃水精度測定不僅包括單波束換能器,同時也可以兼顧多波束換能器。隨著現代水深測量多波束系統的廣泛應用,以及多波束船型文件制作的實際需求,以多波束換能器為重點(單波束換能器根據多波束換能器關系可以直接推定得出)進行靜吃水測定有著更廣泛的用途。結合OCTANS姿態儀,其測定方法主要有船舶上排測量和船舶下水測量兩大部分,基本流程如圖2所示。
4.1 船舶上排測量
4.1.1 建立三維測量獨立坐標系
測量船舶上排、建立閉合導線,在閉合導線上取點A,并在距離A大于200 m且與A通視處,設立一點B作為定向點,導線點均埋設水準鋼標。A和B采用控制測量方式采集定位數據,數據后處理得到高斯投影平面坐標[8]。
導線點采用全站儀測定平面坐標及相對高程,以此為基礎建立三維測量獨立坐標系[9]。
4.1.2 測定測量船舶上設備安裝及船幫點坐標
利用控制點測定多波束探頭、姿態傳感器、定位儀天線等設備中心點的三維坐標;同時測定在船幫上位于船首、船尾及船舷靠近多波束探頭和姿態傳感器處的觀測點的三維坐標。將所有測定的坐標繪制船型示意圖,如圖3所示。

圖3 船型示意
4.1.3 靜態姿態數據采集
在測量船舶下水之前,運行測量設備,用Hypack采集姿態數據30 min。處理靜態采集的數據,剔除異常數據后,求取平均值,得靜態測定值:航向As,橫搖Rs,縱搖Ps[10]。
4.1.4 排上采集數據初處理
經過以上步驟,測量船舶在排上所需的測量數據全部采集完畢,根據已有的數據進行初步計算。
(1)計算測量獨立坐標系北方向真方位角[7]。
(2)計算姿態傳感器縱軸在測量獨立坐標系中的方位角。因為航向As是姿態傳感器縱軸相對于大地坐標系的真方位角,α0是測量獨立坐標系北方向相對于大地坐標系的真方位角,因此,姿態傳感器縱軸在測量獨立坐標系中的方位角為
As′=As-α0
比較姿態傳感器縱軸及船首尾線在測量獨立坐標系中的方位角,如果差值太大,則需重新安裝姿態傳感器并重新測量,直到差值到可控的范圍內,以保證姿態傳感器縱軸與船首尾線盡量吻合。
(3)將測量獨立坐標系轉換到排上測量船坐標系。通過坐標旋轉、平移將測量獨立坐標系通過坐標旋轉和坐標平移轉換到排上狀態下的測量船坐標系(以在用多波束測深中心為原點,X′Y′平行于水平面,X′Y′Z′為左手坐標系:X′指向右舷,Y′指向船艏,Z′指向海底)。
(4)將排上測量船坐標系轉換到與姿態傳感器一致的測量船坐標系。
以上坐標數據XY方向都是在理想狀態下(水平面)利用采集的數據計算得出的,但是船舶的實際狀態是通過姿態傳感器的數據反映出來的,如果將排上測量船坐標系轉換到與姿態傳感器一致的測量船坐標系,測量數據將會更加準確。
根據靜態測定值Rs和Ps,再一次通過坐標旋轉將設備中心位置及船幫上的各觀測點的坐標歸算到姿態坐標系中,建立與姿態傳感器一致的測量船坐標系(坐標原點為多波束測深中心)。
4.2 船舶下水測量
4.2.1 漂泊數據采集
在測量船舶下水之后,選擇合適天氣和海域,進行靜漂測量,運行測量設備,用Hypack采集姿態數據30 min;同時量測在船幫所設置的觀測點處的水面凈空高度。剔除漂泊姿態異常數據后,求取平均值,得到船舶靜漂中姿態傳感器測定值:橫搖Rd,縱搖Pd。
4.2.2 數據處理
(1)排上的姿態傳感器坐標系轉換到與漂泊測定時水面一致的坐標系。實際作業時,人工量測數據均基于水平面量,為了計算方便,需要將排上的姿態傳感器坐標系轉換到與靜漂測定時水面一致的坐標系。根據靜漂測定值橫搖Rd、縱搖Pd以及船舶在排上姿態傳感器靜態測定值Rs和Ps,再一次通過坐標旋轉把各設備中心位置及船幫上的各觀測點轉換到與漂泊測定時水面一致的坐標系(坐標原點為多波束測深中心),從而得到各設備及觀測點在船舶靜漂測定時水面一致坐標系的三維坐標。
(2)計算換能器靜吃水。通過靜漂采集的船幫所設置的各觀測點處的水面高度j2,以及坐標系轉換后各觀測點和換能器中心的垂直高差g2,即可以通過各觀測點計算出換能器的靜吃水h2=g2-j2,最后將各觀測點計算出的各靜吃水值求平均得到最終船舶靜吃水值[7]。
4.3 新型測定方法的優點
該新型的測量船舶靜吃水精確測定方法是在以往傳統吃水測定的基礎上,結合當前水上作業和交通船舶對水深數據精度要求提高而提出的,該方法主要有以下幾個優點。
(1)靜漂水域不必在測區,可以自由選擇不受風浪影響水域,且能通過船幫上各觀測點準確獲得凈空高度,減少環境因素影響。
(2)通過靜漂,可以很方便得到即時船舶姿態數據,并通過計算,得出船舶在水面實際姿態下各設備、觀測點間精確的、動態的、最新的垂直高差。
(3)通過每天工前工后靜漂,可以精確測定船舶換能器靜吃水。
(4)通過即時船舶姿態數據可以更新、制作即時準確的多波束系統船型文件,提高多波束內業處理效率。
(5)通過即時船舶姿態數據可以制作單波束設備安裝偏心文件等。
(6)形成更為可靠、易掌握的測量外業作業流程規范,方便新入行的測量人員理解,并有助于其有效地完成測量任務。
(7)上交正式資料時有依據可尋,方便質檢人員查驗資料的準確性。
4.4 A輪精確測定靜吃水值
2017年5月22日,采用上述方法對A輪進行船舶換能器靜吃水精確測定,計算結果見圖4。A轉換能器靜吃水值見表2。

表2 精確測定A輪滿載情況下換能器靜吃水值 m

圖4 多波束靜態測定計算結果
由表1和表2可知:
(1)采用精確測定方式,換能器靜吃水測值實現厘米級;
(2)采用精確測定方式,測量船舶單波束換能器靜吃水滿載情況下初次測定值與傳統方式測定結果比較吻合,精確測定方式是可靠的;
(3)精確測定的測量結果與傳統的測量結果差異不大,還無法體現出靜吃水測量精度的提升, 關鍵還是在后續實際使用過程中體現出差異性。
5 A輪實施作業跟蹤統計
2017年6~11月,A輪采用新的測定方式參與了每月1次的長江口深水航道維護檢測測量任務,每個檢測周期內A輪單波束換能器靜吃水數據統計見表3。

表3 A輪實施長江口深水航道維護檢測單波束換能器靜吃水值
由表3可以看出:
(1)A輪在實施測量中能夠精確地確定并調整每日的換能器靜吃水值,數值精確到厘米級,實現了精確測定的目的。
(2)通過靜吃水值能清楚了解A輪何時接受過重新補給。
(3)A輪在實施補測過程中,因每次補測工作量不相同,引起吃水變化相對沒有規律。
(4)除11月份外,A輪每次基本滿載出航。在11月換能器靜吃水值已經達到 2.72 m,與原始測定的 2.83 m相比,相差11 cm。
(5)雖然A輪在連續作業過程中船舶換能器每天靜吃水變化都比較小,但通過精確測定方式都能測定其精確值。如果采用原有校儀方式(3.2和3.3中已作闡述),很難測定這種細微的變化,在實際作業過程中,也很難做出相對應的調整。隨著連續作業天數的累積,細微的換能器靜吃水變化,會對水深數據產生分米級的影響。
因此,單獨篩選6~11月初測部分(見表4)作進一步分析。
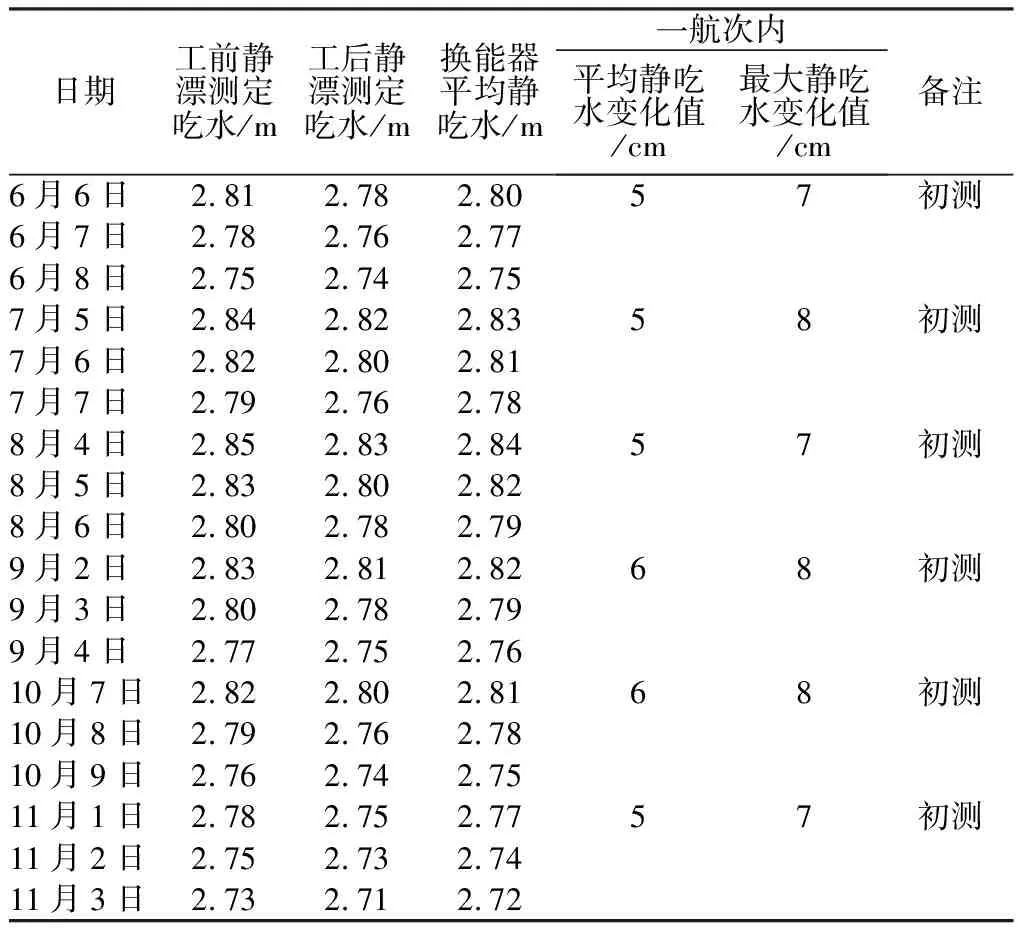
表4 A輪實施長江口深水航道維護檢測初測單波束換能器靜吃水值
從表4可以看出:
(1)在一個連續作業航次(3 d)內,平均靜吃水變化非常穩定,基本在5~6 cm之間,以平均每天約2 cm遞減。
(2)在一個連續作業航次(3 d)內,最大靜吃水變化在7~8 cm,按此規律推算,從連續作業第五天開始,換能器靜吃水變化基本達到10 cm以上。
(3)雖然在第五天換能器靜吃水變化才達到10 cm以上,但海圖水深是以dm為單位,在實際水深測量過程中,例如:原設定船舶換能器靜吃水為2.80 m,換能器至海底實測水深為12.08 m,實時潮位為3 m,實際精確測定船舶換能器靜吃水為2.74 m。
按照原換能器靜吃水值,海圖水深(D)=12.08+2.80-3=11.88≈11.9 m
按照精確測定換能器靜吃水值,海圖水深(D)=12.08+2.74-3=11.82≈11.8 m
因此,即使換能器靜吃水變化調整在幾厘米以內,因四舍五入的原因,調整已經對部分海圖水深數據造成了分米級的影響。
6 意義及展望
6.1 意 義
長江口12.5 m深水航道是大型船舶進出長江黃金水道的重要通道,航運交通繁忙,受到各方高度重視。提高長江口深水航道通航尺度核定測量水深數據成果精度,有著非常顯著的經濟和社會效益。
(1)對進出口船舶的通航安全提供了有力保障。
(2)為決策部門研究落實加強長江口深水航道富余水深利用方案提供參考依據。
(3)對長江口深水航道內大型超寬船舶交會的邊坡利用提供了數據支撐。
(4)對長江口深水航道適航水深浮泥利用研究提供數據基礎。
(5)對航道疏浚企業的補挖補測提供了有效支持,加快航道維護過程,提高深水航道利用率。
(6)對長江口深水航道管理方工程結算提供了準確憑據。
6.2 展 望
本文雖然對船舶換能器靜吃水及其變化的精確測定方面進行了探索,但僅提高靜吃水測定精度是不夠的,因為影響水深數據精度的因素有很多,而水深數據最終成果精度的提升需要各方面影響因素的全面提升。例如船舶動吃水在船舶高速低速時不同,在頂水順水時也不同,這種船舶動吃水的實時變化對水深數據的準確性影響更大。
隨著現代科技的發展,水深測量技術也在發生革命性的變化。國家陸海高程的統一、數字高程模型的全面覆蓋以及RTK、PPK技術的成熟運用,再結合三維姿態傳感器及測深系統的應用,未來的水深測量模式必然可以實現直接精確測量海底水深。本文所探討的提升航道通航尺度核定測量精度是在水深測量技術發展過程中的一個過渡性措施。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
