基于事件觸發(fā)的NNCS動態(tài)輸出的H∞保性能控制
2018-12-10 12:12:56張爽趙立英白敬
計算技術(shù)與自動化
2018年3期
張爽 趙立英 白敬


摘 要:針對具有時變時延的非線性網(wǎng)絡(luò)化控制系統(tǒng)(NNCS),在離散事件觸發(fā)的輸出通訊機(jī)制下,研究了NNCS的保性能控制和H∞魯棒控制問題。首先,設(shè)計NNCS動態(tài)輸出反饋控制器以得到閉環(huán)系統(tǒng),利用Lyapunov穩(wěn)定性方法,給出閉環(huán)系統(tǒng)在無擾動情況下漸近穩(wěn)定和保性能的充分條件;其次,在γ次擾動情況下完成系統(tǒng)的H∞魯棒控制問題;然后,針對系統(tǒng)中出現(xiàn)的輸出誤差、時延、非線性項等因素的影響,采用變量替換法求解出NNCS動態(tài)輸出反饋控制器;最后應(yīng)用Matlab仿真驗證所提方法的有效性。
關(guān)鍵詞:動態(tài)輸出反饋;事件觸發(fā);H∞魯棒控制;保性能控制;非線性網(wǎng)絡(luò)化控制系統(tǒng)
中圖分類號:TP273 文獻(xiàn)標(biāo)識碼:A
Abstract:For nonlinear networked control systems (NNCS) with time-varying delay,under the output communication mechanism of discrete event triggers,this paper deals with robust control problems and guaranteed cost control problems.First of all, NNCS dynamic output feedback controller is designed for the closed-loop system, Using the Lyapunov stability method,some novel criteria for the asymptotic stability of the closed-loop system and guaranteed cost with no disturbance are given;secondly,the robust control problem withtimes disturbance is proved;then in view of the influence of the factors with system output error,time delayand nonlinear term etc , the NNCS dynamic output feedback controller is designed by using variable substitution method;Finally,a Matlab simulation example illustrates the effectiveness of the method.
Key words:dynamic output feedback;event-triggered;Robust control;guaranteed performance control;nonlinear networked control systems
1 引言部分
網(wǎng)絡(luò)化控制系統(tǒng)是指通過通信網(wǎng)絡(luò)將執(zhí)行器、傳感器、控制器連接起來構(gòu)成的一種實時反饋的閉環(huán)系統(tǒng)[1-2]。和傳統(tǒng)的點對點數(shù)據(jù)傳輸?shù)目刂品绞较啾龋哂薪泳€少、效率高、易于安裝和維護(hù)等優(yōu)點。嚴(yán)格來說,對非線性網(wǎng)絡(luò)化控制系統(tǒng)的研究具有更一般的現(xiàn)實意義,線性網(wǎng)絡(luò)化控制系統(tǒng)可以說是非線性網(wǎng)絡(luò)化控制系統(tǒng)的特殊情況。例如高速運動的機(jī)械手的各個部件之間產(chǎn)生的非線性耦合作用等。一般的對于非線性網(wǎng)絡(luò)化控制系統(tǒng)的處理方法就是將其線性化,再來研究線性網(wǎng)絡(luò)化控制系統(tǒng)的魯棒問題。目前多數(shù)文獻(xiàn)研究的都是線性網(wǎng)絡(luò)化控制系統(tǒng)的穩(wěn)定性問題[3],而本文研究的是非線性網(wǎng)絡(luò)化控制系統(tǒng)的穩(wěn)定性問題。
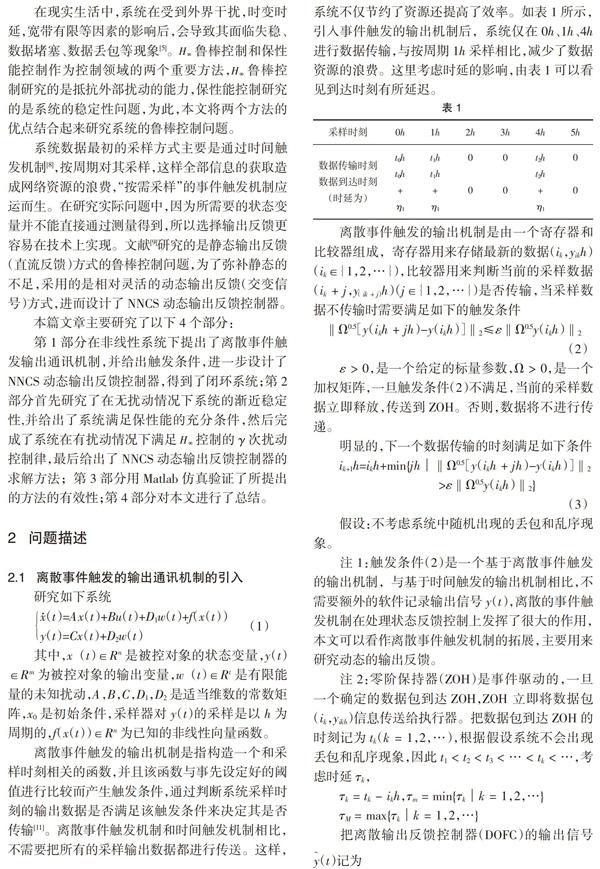
在現(xiàn)實生活中,系統(tǒng)在受到外界干擾,時變時延,寬帶有限等因素的影響后,會導(dǎo)致其面臨失穩(wěn)、數(shù)據(jù)堵塞、數(shù)據(jù)丟包等現(xiàn)象[5]。……
登錄APP查看全文
