車路協(xié)同環(huán)境下駕駛員行為識(shí)別方法研究?
2018-12-12 01:55:22王明露
汽車工程 2018年11期
馬 雷,陳 珂,王明露,曲 瑞
(燕山大學(xué)車輛與能源學(xué)院,秦皇島 066004)
前言
人是交通系統(tǒng)的主體,而駕駛行為識(shí)別是智能交通和智能車輛決策的基礎(chǔ),其準(zhǔn)確性將進(jìn)一步增強(qiáng)決策的可靠性。國(guó)內(nèi)外學(xué)者對(duì)駕駛行為識(shí)別進(jìn)行了較為深入的研究,駕駛員模型研究取得了很多成果。如:(1)基于人—車—環(huán)境閉環(huán)系統(tǒng)車輛操縱穩(wěn)定性的駕駛員模型,其主要運(yùn)用于人—車—環(huán)境這類封閉系統(tǒng)車輛穩(wěn)定性控制的分析和評(píng)估,及車輛主動(dòng)安全操控和智能車輛研發(fā)[1-3],該模型僅基于汽車穩(wěn)定行駛狀態(tài)建立,未考慮路況、車況影響,及汽車接近失穩(wěn)該臨界狀態(tài)下的駕駛行為特性;(2)基于智能交通系統(tǒng)的駕駛員行為模型,該模型表現(xiàn)了駕駛員在智能交通系統(tǒng)中對(duì)汽車的控制,跟馳和換道模型是該模型的主要模型[4-6],其考慮了車輛密集程度、車道數(shù)、車輛模型等外部因素,但未考慮汽車動(dòng)力學(xué)特性,不以汽車行駛穩(wěn)定性控制為目標(biāo);(3)基于交通安全的駕駛員疲勞模型,該模型是反映駕駛員操縱關(guān)系與駕駛員疲勞狀況的模型[7],但目前還未建立能夠清楚地表示出駕駛員疲勞狀態(tài)和其具體行為關(guān)系的駕駛員疲勞模型。
基于車路協(xié)同環(huán)境及駕駛模型的分析,提出了一種介于車輛操縱穩(wěn)定性和智能交通系統(tǒng)的駕駛員行為識(shí)別方法,該識(shí)別方法結(jié)合了兩者的優(yōu)點(diǎn),更加符合人們對(duì)駕駛行為狀態(tài)的描述。本文中主要利用車路協(xié)同環(huán)境獲取道路上各行駛車輛的位置、速度等信息,但由于條件有限,選取微觀仿真軟件獲取道路上行駛車輛的位置、速度等信息,根據(jù)汽車動(dòng)力學(xué)完成基本行駛參數(shù)到行駛狀態(tài)參數(shù)的轉(zhuǎn)化。具體識(shí)別過程為:首先運(yùn)用鄰域粗糙集來對(duì)樣本數(shù)據(jù)特征約簡(jiǎn);再將EEMD和樣本熵融合,完成特征提取及聚類特征向量構(gòu)建;然后運(yùn)用模糊聚類對(duì)駕駛員行為進(jìn)行分類識(shí)別;最后利用微觀交通軟件和UC-Win/Road駕駛模擬器仿真得到的樣本,采用最小平均貼近度擇近原則進(jìn)行檢測(cè)分析驗(yàn)證,并根據(jù)最大貼近度和次最大貼近度計(jì)算待測(cè)樣本屬于某類駕駛行為的隸屬度。實(shí)驗(yàn)證明該方法取得了良好的識(shí)別效果。
1 樣本獲取與識(shí)別特征初選
利用交通微觀仿真軟件建立城市和高速工況下的路網(wǎng)模型,仿真獲取本車及周邊車輛的速度、位置等信息,再結(jié)合汽車動(dòng)力學(xué)獲得車輛動(dòng)力學(xué)信息,為后續(xù)處理提供樣本數(shù)據(jù)。
1.1 樣本獲取
通過預(yù)設(shè)軟件中跟車和換道兩個(gè)駕駛員模塊參數(shù)來預(yù)先設(shè)置駕駛員行為。樣本獲取:首先,選擇合適的高速和城市交通區(qū)域,根據(jù)調(diào)查的交通路網(wǎng)實(shí)際運(yùn)行情況建立路網(wǎng);然后,預(yù)先設(shè)置駕駛員行為,仿真獲取基本樣本。
駕駛員模塊參數(shù)設(shè)置:根據(jù)VISSIM用戶手冊(cè)和文獻(xiàn)[8]中跟車和換道模型中城市和高速模型各參數(shù)與駕駛行為的關(guān)系及文獻(xiàn)[9]中駕駛員反應(yīng)時(shí)間,分析得到跟車和換道模型中對(duì)駕駛員行為影響較大的參數(shù),并將駕駛員行為分為良好、普通、危險(xiǎn)3類,分別用A,B,C表示。再結(jié)合正交實(shí)驗(yàn)法得到城市和高速駕駛員行為分類結(jié)果,具體結(jié)果見表1,其中bxadd和bxmult分別為城市跟車安全距離附加部分和安全距離倍數(shù)部分,CC1為高速跟車期望保持的車頭時(shí)距,amax1,amax2,a′max1和 a′max2分別為換道超車和被超車最大減速度和可接受最大減速度,d和b分別為換道最小車頭空距和協(xié)調(diào)制動(dòng)最大減速度。

表1 跟車和換道模型組合下的駕駛行為分類
從表1中3類駕駛員行為各選取一組參數(shù)進(jìn)行仿真,得到各車輛在各路段各車道中各時(shí)間點(diǎn)的速度和車頭車尾世界坐標(biāo)系(Xf,Yf),(Xr,Yr)。 文中后續(xù)均以該3類駕駛行為類別為準(zhǔn)。
1.2 識(shí)別特征初選
駕駛員行為用本車及本車周邊車輛位置和速度安全信息間接反映,某時(shí)刻本車與預(yù)換道車道周邊車輛狀態(tài)分析如圖1所示,其中若無換道則用與本車相鄰的任意一車道代替預(yù)換道車道。
根據(jù)圖1所示的本車與周邊車輛行駛狀態(tài),初步選取各車輛本車與同車道前后鄰近車輛的相對(duì)縱向車間距、相對(duì)縱向車速(ΔS1,ΔV1,ΔS2,ΔV2),本車與換道前換道車道前后鄰近車輛的相對(duì)縱向車間距、相對(duì)縱向車速(ΔS3,ΔV3,ΔS4,ΔV4),本車與換道前換道車道前鄰近車輛的相對(duì)橫向車間距、相對(duì)橫向車速(ΔS5和ΔV5),及各車輛的橫擺角速度和質(zhì)心側(cè)偏角12個(gè)參數(shù)作為判斷駕駛員行為狀態(tài)的特征參數(shù),參數(shù)轉(zhuǎn)化如下。

圖1 周邊車輛行駛狀態(tài)示意圖
由2自由度汽車模型運(yùn)動(dòng)[10]分析,可得車輛在大地坐標(biāo)系與車輛坐標(biāo)系下轉(zhuǎn)化公式:
式中:vx,vy分別為車輛在大地坐標(biāo)下的縱向速度和橫向速度,由車輛車頭車尾坐標(biāo)(Xf,Yf),(Xr,Yr)得到;v,uc分別為汽車在車輛坐標(biāo)系下的橫向速度和縱向速度;γ為車輛的位置角。
由2自由度汽車模型運(yùn)動(dòng)分析及實(shí)際運(yùn)動(dòng)中側(cè)向加速度v·很小常常忽略,得汽車的質(zhì)心側(cè)偏角β和橫擺角速度ω分別為

式中:ay為汽車質(zhì)心絕對(duì)加速度在oy方向分量。
2 特征的屬性約簡(jiǎn)與數(shù)據(jù)挖掘
為減少駕駛員行為特征值的冗余性,提高運(yùn)算速度及識(shí)別準(zhǔn)確性,在經(jīng)典粗糙集和傳統(tǒng)鄰域粗糙集基礎(chǔ)上,提出了一種改進(jìn)鄰域粗糙集算法,約簡(jiǎn)得到對(duì)駕駛員行為影響較大的特征屬性。再利用EEMD和樣本熵相結(jié)合對(duì)樣本數(shù)據(jù)進(jìn)行數(shù)據(jù)挖掘,為聚類提供了數(shù)據(jù)來源。
2.1 基于改進(jìn)鄰域粗糙集的屬性約簡(jiǎn)
采用基于改進(jìn)鄰域粗糙集屬性約簡(jiǎn)算法是在經(jīng)典鄰域粗糙集前向貪心算法的基礎(chǔ)上,將原來的單一鄰域半徑改成了一個(gè)數(shù)組形式的鄰域半徑,然后以空集為起點(diǎn),逐步向約簡(jiǎn)集合添加新屬性并計(jì)算每次全部剩余屬性的重要度,將重要度大于設(shè)定重要度下限的屬性依次添加到約簡(jiǎn)集合,通過反復(fù)迭代,直至最后剩余屬性重要度全部小于設(shè)定的重要度下限為止。
已知鄰域決策系統(tǒng)(U,C∪D),其中 U={t1,t2,…,tn},C,D分別為條件和決策屬性集合,?B∈C,?ti∈U,ti的 B 鄰域?yàn)?/p>

由于在改進(jìn)鄰域粗糙集的屬性約簡(jiǎn)算法中,標(biāo)準(zhǔn)差是反映數(shù)據(jù)在平均值附近平均波動(dòng)大小的特性,采用標(biāo)準(zhǔn)差作為鄰域半徑的選取標(biāo)準(zhǔn),彌補(bǔ)了經(jīng)典鄰域粗糙集屬性約簡(jiǎn)算法中各條件屬性鄰域半徑設(shè)定為同一單一值帶來的較大誤差[11]。其中,鄰域半徑計(jì)算公式為

式中:δ(ti)為條件屬性;ti為鄰域半徑;Std(ti)為所有樣本條件屬性ti全部數(shù)據(jù)的標(biāo)準(zhǔn)差;λ為鄰域半徑計(jì)算參數(shù)。
式(5)中,λ是控制鄰域半徑δ的關(guān)鍵參數(shù)。選取λ的范圍為[2,4][12],0.1為步長(zhǎng),從2到4對(duì)λ進(jìn)行賦值。屬性約簡(jiǎn)步驟:首先通過設(shè)置改進(jìn)的前向貪心鄰域粗糙集算法中λ值,不斷修正條件屬性的鄰域半徑,再將計(jì)算得到各λ值下的各條件屬性重要度與重要下限0.05和0.001比較,選取條件屬性重要度大于給定重要度下限作為屬性約簡(jiǎn)后的條件屬性;然后再應(yīng)用分類精度較高的決策樹算法(C4.5)和分類性能較穩(wěn)定的樸素貝葉斯NB(Naive Bayesian)進(jìn)行分類,計(jì)算兩種分類器分類精度的平均值(AVG);最后再根據(jù)分類精度和屬性約簡(jiǎn)后的屬性個(gè)數(shù),比較確定最佳λ參數(shù)值及最終約簡(jiǎn)后的屬性。
在城市和高速公路工況選取各250個(gè)樣本,根據(jù)文中1.2部分設(shè)定條件屬性為12個(gè),根據(jù)文中1.1部分決策類別為3種,分別為A,B和C。以城市為例,圖2和圖3為各λ參數(shù)在0.05和0.001重要度下限約簡(jiǎn)前后兩種分類算法的平均分類精度和各屬性約簡(jiǎn)個(gè)數(shù)結(jié)果。
圖2中1,3和4線分別為約簡(jiǎn)后C4.5,AVG和NB,2線為約簡(jiǎn)前 AVG。圖 3中 1線為 0.001和0.05約簡(jiǎn)前,2線為0.001約簡(jiǎn)后,3線為0.05約簡(jiǎn)后。由圖2和圖3可見,當(dāng)λ=[2.6,3]時(shí),分類精度高,選取λ=2.8和重要下限0.05時(shí),分類精度的均值和剩余約簡(jiǎn)屬性達(dá)到最優(yōu),此時(shí)分類精度為86.8%,剩余6個(gè)屬性:本車與同車道前近鄰車相對(duì)縱向車間距、相對(duì)縱向車速,本車與換道前換道車道前近鄰車相對(duì)縱向車間距、相對(duì)縱向車速,及各自本車橫擺角速度和質(zhì)心側(cè)偏角。其中,λ=2.8時(shí)得到各條件屬性的重要度如表2所示。由表2可見,0.05重要度下限下剩余6個(gè)屬性,上述約簡(jiǎn)正確。類似地以相同方法約簡(jiǎn)高速各樣本屬性最終得到相同剩余約簡(jiǎn)屬性,不再論述。

圖2 0.05和0.001重要度下限的分類

圖3 0.05和0.001重要度下限下約簡(jiǎn)前后的屬性個(gè)數(shù)
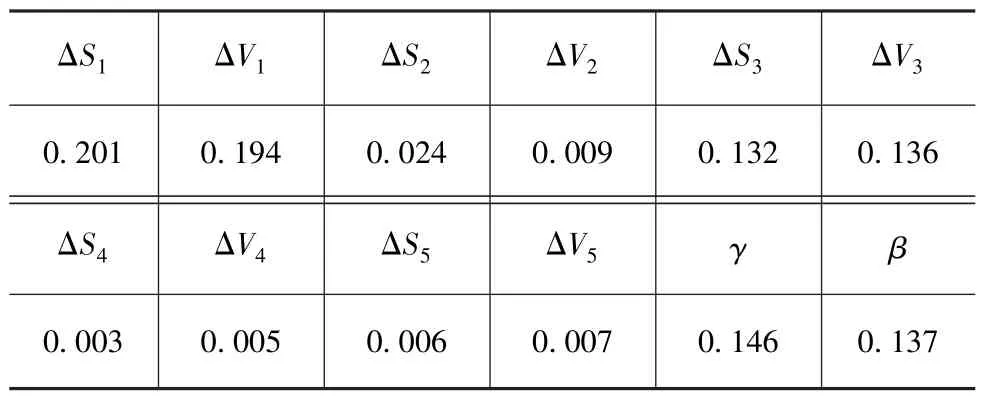
表2 城市道路λ=2.8時(shí)各條件屬性重要度
2.2 基于EEMD和樣本熵的特征提取
EEMD是基于EMD在原始信號(hào)中加入高斯白噪聲產(chǎn)生的,其應(yīng)用白噪聲頻域頻率均勻分布及零均值特性,使信號(hào)分解既保留了EMD的優(yōu)點(diǎn)且抑制了EMD的模式混淆現(xiàn)象,使原始信號(hào)分解精度有效提高[13-14]。EEMD具體算法如下:
(1)確定平均運(yùn)算次數(shù)M與將要加入的高斯白噪聲的幅值,將白噪聲加入原始信號(hào)x(t),得到新信號(hào)xi(t),其中i為添加白噪聲次數(shù);
(2)將xi(t)EMD分解,得到一組IMF分量;
(3)將上述IMF分量從x(t)中剔除,得到新信號(hào)。
重復(fù)以上步驟,直至得到x(t)所有分量為止,將得到的對(duì)應(yīng)IMF總體求均值,得到最終IMF和一個(gè)剩余殘余量rn(t)。

式中cij(t)為第i次加入白噪聲后,經(jīng)EEMD分解得到的第j個(gè)IMF分量。
根據(jù)EEMD算法,設(shè)定本次實(shí)驗(yàn)白噪聲幅值為0.1,運(yùn)算次數(shù)100,以城市3類駕駛員中一組橫擺角速度EEMD分解為例,結(jié)果如圖4所示。圖中各曲線表示各類駕駛行為下各自橫擺角速度信號(hào)分解得到的初始數(shù)據(jù)信號(hào)的固有模態(tài)函數(shù)(即IMF分量)。城市3類駕駛行為各特征相關(guān)系數(shù)與閾值見表3。
由表3可見,IMF1和IMF2相關(guān)系數(shù)相對(duì)其余IMF分量較大,則上述城市3類駕駛行為車輛的真實(shí)分量為IMF1和IMF2。采用上述相同方法,處理城市和高速中各樣本數(shù)據(jù),得到大多數(shù)特征真實(shí)分量均在 IMF1~I(xiàn)MF2之間。因此,最終取 IMF1~I(xiàn)MF2作為所有特征的真實(shí)分量。
樣本熵是一種度量時(shí)間序列復(fù)雜度的方法,反映了原時(shí)間序列維數(shù)改變時(shí)產(chǎn)生新模式的概率及模式間自我相似度,具有良好的一致性和抗數(shù)據(jù)丟失能力。再將上述篩選出的各特征IMF真實(shí)分量的樣本熵值作為駕駛員行為識(shí)別特征向量,會(huì)相應(yīng)提高駕駛員行為識(shí)別準(zhǔn)確率。
時(shí)間序列{c(t)|1≤t≤M}樣本熵算法如下:
(1)構(gòu)造m維矢量 c(k)=[c(k),c(k+1),…c(k+m-1)],(1≤k≤M-m+1);
(2)計(jì)算c(k)和c(j)間對(duì)應(yīng)元素的最大值d[c(k),c(j)];
(3)計(jì)算小于給定相似容限r(nóng)的d[c(k),c(j)]的數(shù)目與矢量總數(shù)M-m的比值的均值Bm(r);

圖4 城市道路3類駕駛行為橫擺角速度EEMD分解
(4)將模式維數(shù)m加1,重復(fù)步驟(2)和步驟(3)得到Bm+1(r)。當(dāng)M有限時(shí),可計(jì)算得到時(shí)間序列樣本熵SampEn(m,r,M)的估計(jì)值。

參數(shù)m和r影響樣本熵的計(jì)算精度,經(jīng)分析,選取m=2,r=0.1ε(ε為原始數(shù)據(jù)的標(biāo)準(zhǔn)差)時(shí),樣本熵統(tǒng)計(jì)特性相對(duì)較理想。以城市道路3類駕駛行為為例,根據(jù)上述EEMD分解、特征篩選和樣本熵計(jì)算,部分樣本熵如表4所示,并將計(jì)算所得樣本熵值構(gòu)成特征向量作為聚類的數(shù)據(jù)來源。

表3 城市3類駕駛行為各特征相關(guān)系數(shù)與閾值
3 基于GG聚類駕駛行為識(shí)別驗(yàn)證
3.1 GG聚類不同駕駛行為實(shí)驗(yàn)分析
基于GG聚類優(yōu)點(diǎn):它是基于數(shù)學(xué)統(tǒng)計(jì)的模糊估計(jì)聚類法;GG聚類曲線呈不規(guī)則形,擴(kuò)張了其應(yīng)用范圍,對(duì)大小、密度、形狀均不同的樣本集合也可實(shí)施聚類分析。因此選GG聚類運(yùn)用于駕駛員行為識(shí)別[15],GG聚類算法如下。
假設(shè)聚類樣本集合 X={x1,x2,…,xn},對(duì)任意樣本xi(0≤i≤n)均有 s個(gè)特性指標(biāo),即:xi={xi1,xi2,…,xis},現(xiàn)將該集合劃分為 c類(2≤c≤n);設(shè)其隸屬度矩陣和聚類中心分別為 U=[μjk]c×n和 V=[v1,v2,K,vc]T,其中 μjk為第 k 個(gè)樣本元素對(duì)于第 j類的隸屬度且μjk∈[0,1]。該聚類原則是經(jīng)過多次迭代來調(diào)整(U,V)使目標(biāo)函數(shù)J(U,V)取最小,目標(biāo)函數(shù)為

表4 城市道路3類駕駛行為剩余屬性的樣本熵(部分)

式中:m為模糊指數(shù),m的值越大各聚類重疊的越多,即劃分的越模糊,一般選取m=2;Dij為引入模糊最大似然估計(jì)的距離測(cè)度。
GG聚類具體運(yùn)算步驟如下:
(1)設(shè)定聚類分類數(shù)目c,模糊指數(shù)m,初始化模糊劃分矩陣U;
(2)計(jì)算聚類中心vj,其中L為迭代次數(shù)

(3)引入模糊最大似然估計(jì)距離測(cè)度

式中:pj為聚類中第j類被選中的先驗(yàn)概率;Bj為聚類中第j類的協(xié)方差矩陣;Djk為引入模糊最大似然估計(jì)的距離測(cè)度。
(4)更新隸屬度矩陣U

至滿足‖U(L+1)-U(L)‖<σ,(σ 為?正數(shù)),否則繼續(xù)迭代,重復(fù)(2),至滿足更新終止條件。
應(yīng)用GG算法聚類,聚類數(shù)目c=3,模糊指數(shù)m=2,容差τ=0.0001,將上述章節(jié)獲取的樣本熵看作GG聚類的輸入特征矩陣。選取1 250組樣本數(shù)據(jù),運(yùn)行GG聚類不斷迭代更新聚類中心,得到聚類結(jié)果如圖5所示,其中“o”是樣本的聚類中心。
向量X根據(jù)同屬于一個(gè)類別駕駛行為的不同樣本數(shù)據(jù)享有相似性,經(jīng)GG聚類,其將會(huì)圍繞在同一個(gè)聚類中心附近。從圖5可以看出,城市和高速各形成3個(gè)聚類中心,其中各類中的樣本點(diǎn)分別緊湊地分布在各類聚類中心周圍,表明GG聚類算法達(dá)到了良好的聚類效果。
應(yīng)用分類系數(shù)法和平均模糊熵法檢驗(yàn)GG聚類效果,結(jié)果如表5所示。

表5 GG聚類效果檢驗(yàn)
依據(jù)原則:分類系數(shù)F的值越靠近于1,同時(shí)平均模糊熵H的值越靠近于0,則其聚類效果越好。所以由表5可知,GG聚類適合用于駕駛行為識(shí)別中,且效果較好。
3.2 不同類型駕駛行為識(shí)別
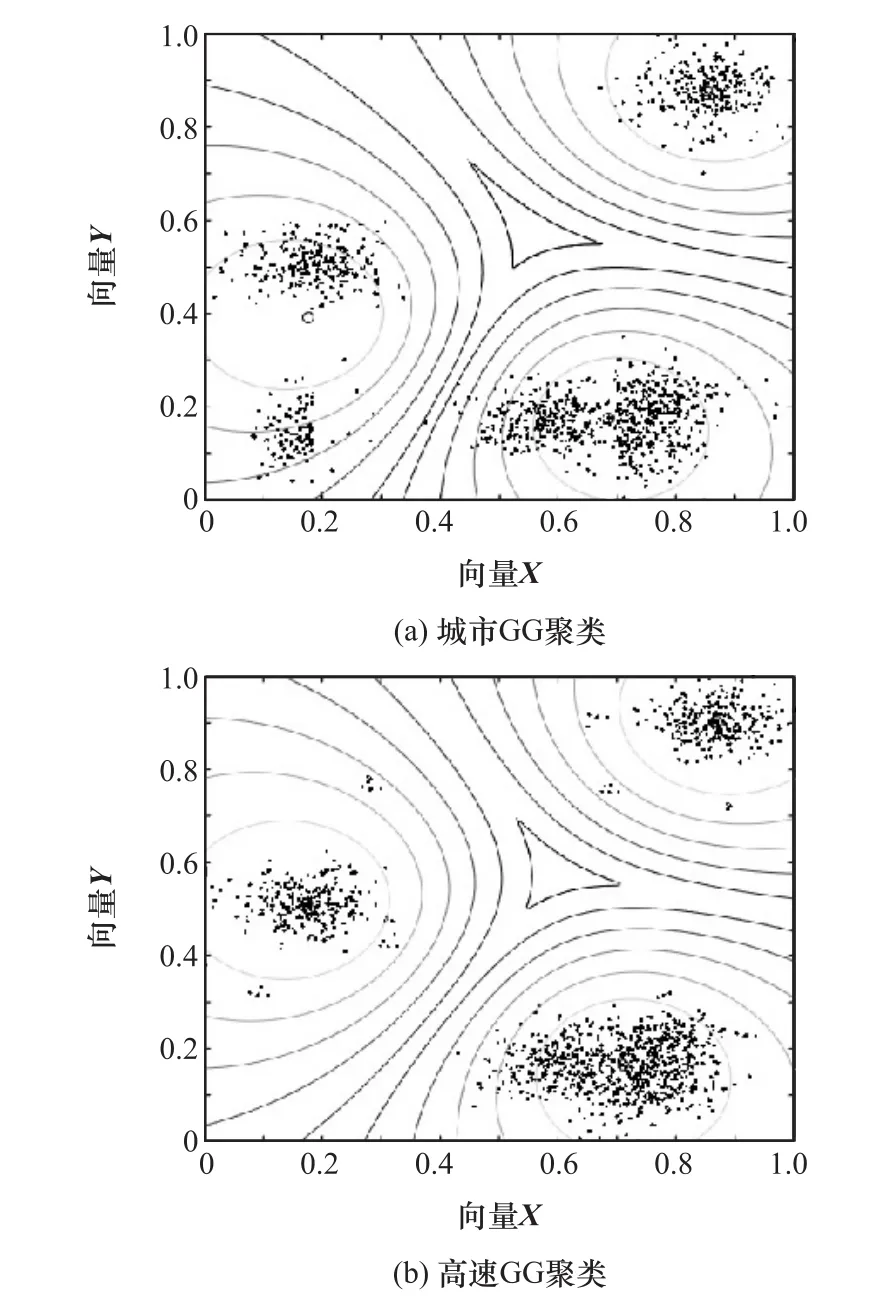
圖5 城市和高速下3種駕駛行為狀態(tài)GG聚類
選取20人次通過UC-Win/Road 3自由度駕駛模擬器模擬3類不同駕駛行為,獲取 20組待測(cè)樣本,其余待測(cè)樣本通過微觀仿真軟件仿真獲取,最終共獲得200組待測(cè)樣本。駕駛模擬器如圖6所示。將實(shí)驗(yàn)樣本經(jīng)過EEMD和樣本熵處理得到的數(shù)據(jù)作為待識(shí)別樣本,以GG聚類的聚類中心為標(biāo)準(zhǔn)樣本,標(biāo)準(zhǔn)樣本見表6和表7。

圖6 駕駛模擬器

表6 城市道路下標(biāo)準(zhǔn)樣本

表7 高速道路下標(biāo)準(zhǔn)樣本
對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理,然后根據(jù)最小平均貼近度公式:

其中0≤Z(t)≤1
分別計(jì)算其和各自標(biāo)準(zhǔn)樣本最小平均貼近度,對(duì)樣本進(jìn)行診斷識(shí)別,根據(jù)最大貼近度原理上述200組樣本部分診斷結(jié)果如表8所示。
統(tǒng)計(jì)以上200個(gè)樣本識(shí)別結(jié)果,計(jì)算得到城市和高速駕駛員行為診斷正確率分別為92%和93%。且根據(jù)表9可知,出現(xiàn)分類錯(cuò)誤的幾個(gè)樣本其最大貼近度與次貼近度大小相近,說明上述GG聚類分類器是可靠和有效的。圖7為3類駕駛員行為各樣本最大貼近度與次貼近度圖。其中橫坐標(biāo)取各類樣本總數(shù)間隔分之一。
如圖7(a)所示,次貼近度曲線代表A類樣本與B類樣本的貼近程度,圖中左側(cè)距離B類聚類中心較遠(yuǎn),說明這些樣本駕駛行為更加良好,而右側(cè)靠近B類樣本中心,說明這些樣本駕駛行為逐步向B類靠攏;圖7(b)次貼近度曲線左右兩側(cè)分別于A類和C類的貼近程度;圖7(c)與圖7(a)情況相似。貼近度表征兩模糊子集間的相近程度,貼近度越趨近于1表明兩子集越接近。如表8中組號(hào)1和2兩個(gè)樣本,3個(gè)貼近度之和不相等,且不為一,其原因是聚類中心為12維,因此其分類邊界是復(fù)雜的,不能將最大貼近度作為該樣本屬于該類的隸屬度。根據(jù)式(14)可知,貼近度計(jì)算已對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理,即實(shí)現(xiàn)對(duì)數(shù)據(jù)的歸一化,同時(shí)可以認(rèn)為1-δi表征到3個(gè)聚類中心距離。而駕駛員行為是漸進(jìn)變化的,因此設(shè)直線上有A,B和C 3點(diǎn)分別表示與3類貼近度為1的點(diǎn),在直線上選取兩點(diǎn)m和n,分別屬于A和B兩類,如圖8所示。
圖8中Lij表示點(diǎn)i到j(luò)的距離。m點(diǎn)代表圖7(a)中左側(cè)樣本,與圖7(c)右側(cè)樣本類似;n點(diǎn)代表其它樣本。計(jì)算m和n點(diǎn)樣本隸屬度分布如式(15)~式(17)所示,圖9為樣本隸屬度計(jì)算結(jié)果。

表8 不同駕駛員行為類型診斷結(jié)果(部分)

圖7 各類樣本最大貼近度與次貼近度關(guān)系

圖8 隸屬度計(jì)算示意圖

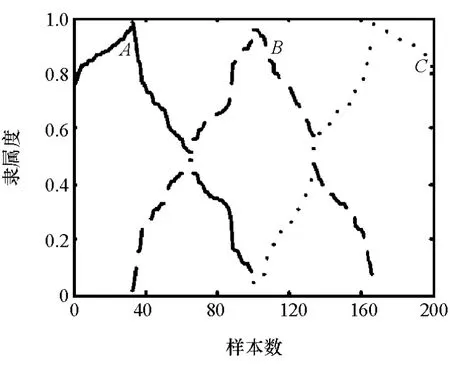
圖9 樣本隸屬度圖
如圖9所示,A,B和C分別為3類的中心值,從分布上看基本與模糊控制中的三角形分布相類似。表8中組號(hào)3和4兩個(gè)樣本屬于A類的隸屬度分別為0.894和0.825。雖然組號(hào)3的隸屬度大于組號(hào)4,但是組號(hào)4的樣本位于A類中心的左側(cè),而組號(hào)3位于A類中心的右側(cè),說明其駕駛行為相對(duì)于樣本3更加良好,說明隸屬度更有利于對(duì)駕駛行為的評(píng)價(jià)。表9為分類誤判樣本的隸屬度。

表9 誤判樣本隸屬度表
根據(jù)表9可知,誤判樣本的隸屬度都在0.4和0.6之間,位于圖9中兩類隸屬度交叉處,說明即使在識(shí)別不準(zhǔn)確的情況下,隸屬度也基本可描述該樣本的駕駛行為。
4 結(jié)論
(1)給出基于本車車輛動(dòng)力學(xué)信息與周邊車輛的位置、速度等信息的駕駛員行為評(píng)價(jià)方法。該方法是介于車輛操縱穩(wěn)定性與智能交通系統(tǒng)的駕駛員行為評(píng)價(jià)方法,結(jié)合了兩者的優(yōu)勢(shì),更加符合實(shí)際人們對(duì)駕駛行為狀態(tài)的描述。
(2)運(yùn)用粗糙集理論實(shí)現(xiàn)對(duì)識(shí)別特征的屬性約簡(jiǎn),使識(shí)別特征屬性由12個(gè)約簡(jiǎn)為6個(gè),有效地避免了模式識(shí)別中的維數(shù)災(zāi)難問題,提高了方法的可用性。利用EEMD對(duì)約簡(jiǎn)后特征進(jìn)行數(shù)據(jù)挖掘,可以從大量歷史數(shù)據(jù)中自動(dòng)搜索隱藏于其中的特殊關(guān)系性,利于發(fā)現(xiàn)識(shí)別特征有益于模式識(shí)別的內(nèi)在屬性,提高識(shí)別的可靠性。
(3)采用GG聚類方法,應(yīng)用最小平均貼近度擇近原則實(shí)現(xiàn)了不同駕駛行為的識(shí)別。根據(jù)最大貼近度和次最大貼近度計(jì)算待測(cè)樣本屬于某類駕駛行為的隸屬度,即使在識(shí)別不準(zhǔn)確的情況下,該隸屬度也基本可描述樣本的駕駛行為。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
汽車電器(2018年1期)2018-06-05 01:22:54
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
公民與法治(2016年4期)2016-05-17 04:09:26
