RBF神經網絡在組合導航系統中的應用
2018-12-14 12:56:06強明輝
自動化與儀表 2018年11期
關鍵詞:系統
強明輝 ,蔣 文
(1.蘭州理工大學 電氣工程與信息工程學院,蘭州 730050;2.蘭州理工大學 甘肅省工業過程先進控制重點實驗室,蘭州 730050;3.蘭州理工大學 電氣與控制工程國家級實驗教學示范中心,蘭州 730050)
捷聯慣性導航系統(SINS)、全球定位統(GPS)和北斗定位系統(BDS)都屬于自主導航系統。由于慣性導航與衛星導航兩者性能上的優勢補性,而成為組合導航發展的熱點。隨著BDS的逐步投入使用,對我國無人機而言,研究的BDS相關的信息融合技術具有重要的意義。
信息融合估計方法可概括為隨機類和人工智類兩大類[1]。以Kalman濾波為代表的隨機類方法基于嚴格的協方差估計,對系統模型、噪聲統計特性等先驗知識要求較嚴,主要適用于線性系統;以神經網絡為代表的人工智能類方法基于經驗積累,具有魯棒、自適應的特點,可用于非線性系統。對于組合導航系統而言,在許多實際場合,其系統模型和噪聲統計特性存在著一定的不確定性和非先驗性,導致Kalman濾波器產生較大估計誤差,甚至發散;而采用單純的神經網絡濾波,網絡訓練經驗性太強,工程實現性較差,并且估計精度也不夠理想。
因此人們開始探討Kalman濾波與神經網絡相結合的可行性。文獻[2]針對多目標跟蹤問題,提出用神經網絡輔助傳統Kalman濾波器的混合目標跟蹤器算法。文獻[3]將RBF神經網絡應用于GNSS/INS的組合導航中,當GNSS信號失鎖時成功的對INS誤差進行了補償。文獻[4]將神經網絡應用于GPS/INS組合導航,在GPS信號失鎖時能夠保證一定的導航精度。文獻[5]將BP神經網絡用于輔助聯邦Kalman濾波。本文針對多傳感器組合導航問題,提出RBF神經網絡輔助聯邦Kalman濾波器的SINS/GPS/BDS導航方案,使其能更好的應對環境干擾,具有較高的自適應性、實時性和估計精度。
1 組合導航系統總體方案設計
組合導航系統是以捷聯慣導為參考系統,分別與GPS、BDS組合,構成2個子濾波器。本文采用RBF神經網絡輔助聯邦Kalman濾波器方案。結構框圖如圖1所示,子濾波器分別利用GPS和INS的位置速度之差以及BDS和INS的位置和速度之差作為濾波器的觀測向量,利用卡爾曼濾波器進行最優濾波,得到組合導航系統的位置、速度和其他導航參數誤差的最優估計,主濾波器利用全局估計各子濾波器的狀態,并將狀態方程的信息和狀態估計的信息根據信息分配系數分配到各子濾波器中。主濾波器輸出的全局最優估計值經RBF神經網絡輸出修正得到相對真值

圖1 RBF輔助聯邦Kalman組合導航系統結構框圖Fig.1 Block diagram of RBF-assisted federal Kalman integrated navigation system
2 聯邦濾波器模型的建立
組合導航系統的任務是利用外部量測信息,精確估計出捷聯慣導系統的誤差,并通過誤差補償,提供連續、實時、高精度的位置、姿態及速度信息,從而能夠保證無人機自主導航的精度。
2.1 系統的狀態方程
選取東北天地理坐標系為導航坐標系,組合導航系統的狀態向量選取為SINS、陀螺和加速度計的誤差狀態量,共計18個,包括3個捷聯慣導數學平臺姿態角誤差 φE、φN、φU,3 個速度誤差 δvE、δvN、δvU,3 個位置誤差 δL、δλ、δh,3 個陀螺儀隨機常值漂移,3個陀螺儀一階馬爾可夫過程漂移和3個加速度計隨機一階馬爾可夫過程漂移。其狀態方程為

式中,狀態矢量X為

噪聲隨機誤差矢量W為

式中:E、N、U 分別表示東、北、天方向;δφE、δφN、δφU為姿態角誤差;δVE、δVN、δVU為速度誤差;δL、δλ、δh為緯度、經度、高度誤差;εbx、εby、εbz為陀螺儀的隨機常數漂移;εrx、εry、εrz為陀螺儀一階馬爾科夫漂移;▽x、▽y、▽z為加速度一階馬爾科夫漂移。為姿態矩陣;Cnb、FN、FS、FM矩陣的選取參見文獻[6]。
2.2 子濾波器狀量測方程的建立
為了降低各子濾波器的維數,子系統不把衛星導航系統的誤差變量引入狀態方程,而只在量測方程中考慮其誤差。
2.2.1 子系統1(SINS/GPS)
將GPS輸出的位置、速度信息與SINS的相應輸出相減,可得其量測方程為[7]

式中:V1(t)為 GPS 位置、速度量測噪聲;
2.2.2 子系統 2(SINS/BDS)
SINS和BDS以位置、速度的組合方式進行組合導航。可得其量測方程為
式中:V2(t)為 BDS 位置、速度量測噪聲矢量(1-2 f+3 f sin 2L)為地球酉圈;RN=Re(1+2 f sin 2L)為子午圈的曲率半徑;f=1/289.257;Re=6378137 m。
3 聯邦濾波的結構與算法
3.1 βi的自適應修正與全局最優估計
在多源信息融合導航系統中,聯邦濾波器因為其計算量小、精度較高、有一定的容錯性能而被廣泛用于組合導航。
由于各觀測信息源相互獨立,多源信息融合的聯邦濾波器可表示為

式中:Pi(k)、Xi(k)表示 k 時刻第 i個子濾波器的方差和估計值表示 k 時刻全局均方誤差和全局估計值。聯邦濾波算法的關鍵是確定信息分配系數βi,各個子濾波器估計精度的高低與其估計誤差協方差Pi密切相關,因此可以根據Pi的特征值的分解來分配系數:Pi=LΛiLT式中 Λ=diag{λi1,λi2,λi3}。 由 Pi的定義我們可知 λik(k=1,2,3)與估計狀態的估計誤差對應。信息系數分配如下:

式中:(trΛi)為矩陣 Pi的跡,(trΛi)的值越小,則第 i個傳感器的濾波估計值精度越高。
4 RBF神經網絡輔助聯邦Kalman濾波
4.1 RBF神經網絡設計
常用的NN模型包括BP與RBF,BP為全局逼近網絡,其學習速度慢;RBF網絡為局部逼近網絡,對每個訓練樣本,只需進行少量的權值與閾值的調整即可,其學習速度快。為一種三層前饋網絡,基函數是高斯基函數。包括一個輸入層,一個隱含層和一個輸出層。
RBF網絡的體系結構如圖2所示,可以看出RBF網絡具有三層反饋網絡。神經網絡的輸出可以寫成:
式中:L和n*是輸出節點的數量和隱藏節點;θij是從第j個隱藏節點到第i個輸出節點的權重;cj表示第j個中心向量;bj表示第j個隱藏節點的寬度。在大多數時候,我們選擇高斯函數 g(α)=exp(-α2)作為激活功能g。差的參數作為神經網絡的輸入,其由下面兩部分構成:①用觀測矩陣H(k)乘以狀態預測值,得到k-1時刻對k時刻測量值的預測值,再用實測值減去預測值得到偏差信息;②利用各子濾波器的濾波增益Kk作為神經網絡的輸入。
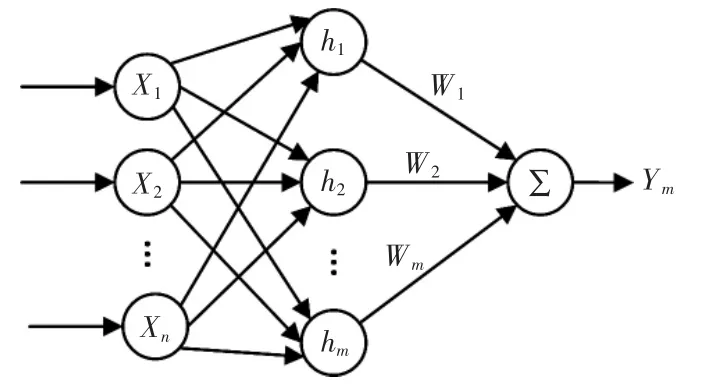
圖2 RBF神經網絡拓撲結構圖Fig.2 RBF neural network topology diagram
然而上式只是在理論上成立,實際的目標跟蹤系統并非是線性系統,用上式進行濾波必定會產生一定的誤差,甚至會發散。因此需要用RBF神經網絡來進行校正。把能直接影響Kalman濾波估計誤
4.2 神經網絡輔助聯邦Kalman濾波結構設計
常規聯邦Kalman濾波算法是基于嚴格的協方差估計,要求系統噪聲方差陣Q和量測噪聲方差陣R己知,但對于組合導航系統而言,其系統模型和噪聲統計特性存在不確定性和非先驗性,這將導致聯邦濾波器產生一定的估計誤差,甚至發散。神經網絡具有高度的自學習能力,可以以任意精度逼近非線性函數,非常適合模擬復雜的非線性系統。因此,可將聯邦濾波器的估計能力和神經網絡的學習能力相結合,提高系統的自適應性和估計精度。本文設計的RBF網絡輔助聯邦濾波的具體結構如圖3所示。

圖3 RBF輔助聯邦濾波器結構Fig.3 RBF auxiliary federated filter structure
5 仿真分析
為了驗證本文所提算法的有效性,通過Matlab對INS/GPS/BDS組合系統進行了仿真實驗。仿真中陀螺常值漂移取為0.04°/h,陀螺一階馬爾可夫隨機漂移取為0.01°/h,等效加速度零偏為0.0004 g;陀螺一階馬爾可夫過程相關時間為300 s,加速度一階馬爾可夫過程相關時間為1000s。GPS接收機測距噪聲為標準差為15 m的白噪聲,BDS接收機測距噪聲為標準差為10 m的白噪聲,系統仿真時間為500 s。
仿真結果如圖4~圖6所示,圖4為SINS系統的定位誤差圖。隨著時間的積累SINS系統出現發散。故慣性導航系統難以承擔長時間的飛行導航任務。圖5為BP神經網絡輔助聯邦Kalman濾波與聯邦Kalman濾波誤差對比圖,從150 s開始加入神經網絡輔助濾波。由圖5可知,相比單純的聯邦Kalman濾波,經過BP神經網絡輔助后,各項導航參數估計精度均有所提高。圖6為RBF神經網絡輔助聯邦Kalman濾波與聯邦Kalman濾波誤差對比圖,訓練參數與BP相同,但是其速度快。從表1可以看出當SINS系統無粗差干擾時神經網絡輔助濾波均能提高聯邦Kalman濾波的精度,能夠有效地減弱組合導航系統建模的誤差,總體上RBF神經網絡的性能優于BP神經網絡。當SINS系統200 s到202 s存在粗差,得到圖7與圖8。
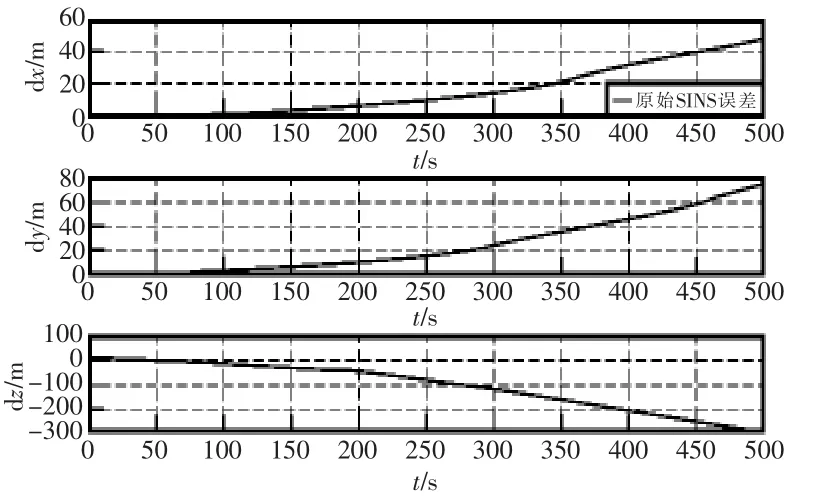
圖4 SINS的原始誤差Fig.4 Original error of SINS
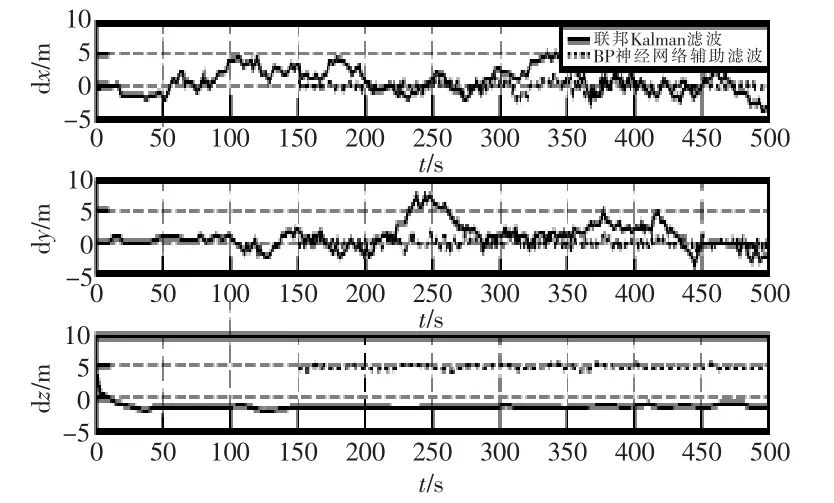
圖5 聯邦Kalman與BP輔助濾波誤差對比Fig.5 Comparison of federal Kalman and BP assisted filtering errors
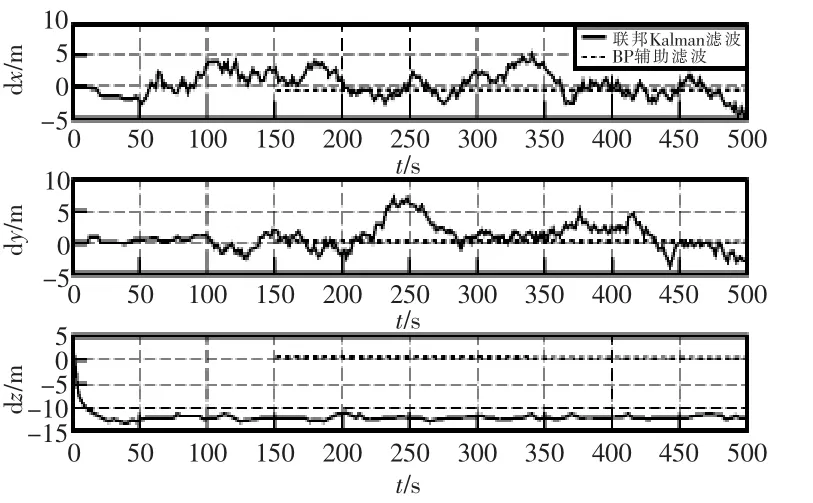
圖6 聯邦Kalman與RBF輔助濾波誤差對比Fig.6 Comparison of federated Kalman and RBF assisted filtering errors
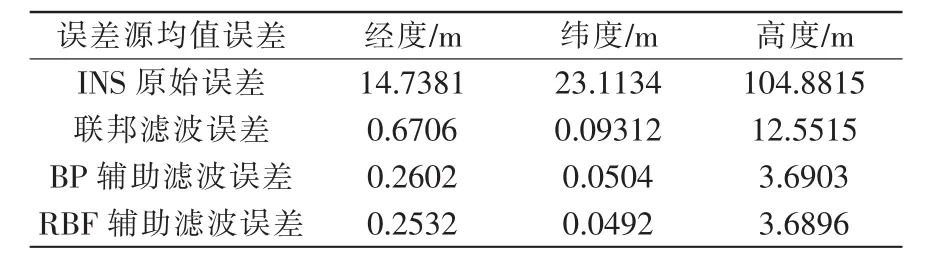
表1 濾波前后的均值誤差Tab.1 Mean error before and after filtering
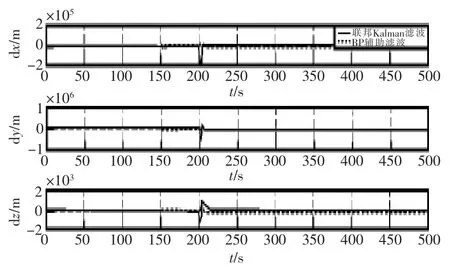
圖7 聯邦Kalman與BP輔助濾波誤差對比Fig.7 Comparison of federal Kalman and BP assisted filtering errors
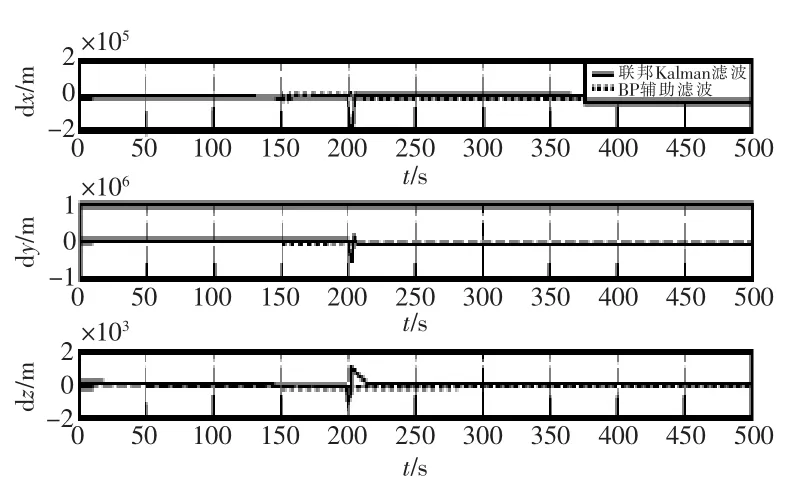
圖8 聯邦Kalman與RBF輔助濾波誤差對比Fig.8 Comparison of federated Kalman and RBF assisted filtering errors
如果SINS系統存在粗差時,從圖7、圖8以及表2計算結果可知,在SINS導航數據處理中,如果存在觀測異常,聯邦Kalman濾波技術對無人機組合導航的數據處理精度遠遠不夠,BP神經網絡輔助聯邦Kalman濾波能夠有所提高但其精度不夠。RBF神經網絡輔助聯邦Kalman濾波能夠更好的抑制載體觀測異常對導航精度的影響,組合導航系統仍然可靠。

表2 加入粗差濾波前后的均值誤差Tab.2 Mean error before and after adding gross error filtering
6 結語
本文針對SINS系統難以長時間保證無人機導航的精度和組合導航系統的建模存在一定的誤差,利用神經網絡強大的逼近非線性系統的能力,可以有效的減弱組合導航的建模誤差。對比了BP和RBF神經網絡輔助聯邦Kalman的信息融合方案,當SINS系統觀測信息中存在粗差。表明RBF神經網絡輔助聯邦Kalman的信息融合方案具有更好的動態特性和魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32