基于多特征融合的前方車輛檢測的應用與研究
2018-12-15 11:25:56馬龍劉勝
計算機時代 2018年10期
馬龍 劉勝
摘 要: 為了提高前方車輛檢測的準確率和效率,提出了一種改進的多分辨率下的多特征提取的方向梯度直方圖(HOG)特征融合算法。首先將樣本擴縮為分辨率不同的圖像,后轉為YUV色彩空間,其次加權融合Y,U,V多通道方向梯度直方圖(HOG)形成訓練特征,最后采用支持向量機(SVM)對融合后的訓練特征車輛分類器訓練和檢測。實驗表明,該算法比傳統HOG提取特征算法車輛檢測率更高,效率高達98.92%,并且在不同天氣狀況下均有良好的檢測效果和魯棒性。
關鍵詞: 方向梯度直方圖; YUV色彩空間; 支持向量機; 車輛檢測; 多特征融合
中圖分類號:TP391.4 文獻標志碼:A 文章編號:1006-8228(2018)10-42-03
Abstract: To improve the accuracy and efficiency of vehicle detection, a multi-feature extractive histogram of oriented gradient (HOG) fusion algorithm is proposed. Firstly, the sample pattern is expanded and narrowed to images with different resolutions and converted to YUV color space, followed by weighted fusion Y, U, V multi-channel histogram of oriented gradient (HOG) training features, Finally, support vector machine (SVM) is used to train and detect the trained features. The experiment shows that this algorithm has a higher detection rate than the traditional HOG extraction feature algorithm, and the efficiency is as high as 98.92%,and have good detection effect and robustness under different weather conditions.
Key words: HOG; YUV color space; support vector machine; vehicle detection; multi-feature fusion
0 引言
快速且精準的車輛檢測系統能在交通出行中避免潛在的危險,可以有效減少其帶來的交通隱患,其中基于視覺的車輛檢測也一直是圖像處理、計算機視覺的重要研究課題[1-2]。目前基于視覺的車輛檢測可以分為兩個階段:在特征提取階段,系統提取車輛的陰影[3],顏色[4],紋理等外觀特征,從而得到可能存在車輛的候選區域,以提高感興趣區域內的檢測效率。檢測驗證階段主要有基于模板[5]和基于學習[6]兩種方法。基于模板[7]的方法魯棒性好,但實時性較差,檢測效果不穩定;基于學習的方法是目前車輛檢測領域研究的重點,且檢測效果較好。本文在特征提取階段選用的是方向梯度直方圖(HOG), HOG具有注重輪廓不過多考慮輪廓內部的形態特點和較強的描述物體輪廓能力。而在檢測驗證階段,考慮到車輛檢測本質就是二分類的問題,支持向量機(SVM)本身具有較強的分類的能力,故選為本文車輛檢測的分類器。
1 車輛檢測方法概述
在傳統的HOG特征提取中,由于忽略了樣本圖像的色彩信息,當車輛的灰度空間和地面很接近時,灰度域的局部梯度就不明顯,從而導致車輛檢測率降低和誤檢率增高,本文針對上述問題,提出了一種改進的多分辨率下的YUV色彩空間相融合的方向梯度直方圖(HOG)和支持向量機(SVM)的前向車輛檢測算法,具體步驟為:①將樣本分辨率擴縮為72×72,32×32之后,由RGB色彩空間轉為YUV色彩空間,分別提取圖像的Y、U、V三通道數據模板,保存為二維矩陣MU,MU,MV;②在對應的二維矩陣中,分別提取和計算出多通道特征HY、HU、HV;③把得到HOG多通道特征進行加權融合成最終訓練特征H_HOG;④融合后的H_HOG特征用支持向量機(SVM)進行訓練,生成訓練模型。
2 特征提取
2.1 RGB色彩空間轉為YUV色彩空間
YUV是一種基于人眼感知的色彩空間,其中“Y”表示明亮度,也就是灰階值;而“U”和“V”表示的則是色度,其作用是描述圖像的色彩和飽和度。采用YUV色彩空間是因為它的亮度信號Y和色度信號U、V是分離的,其中RGB色彩空間轉為YUV色彩空間公式為:
2.2 HOG特征提取與融合
方向梯度直方圖(histogram of oriented gradient, HOG)特征是用于計算機視覺和圖像處理中的對象檢測的特征描述器,已經廣泛應用于在行人檢測[8]和交通標志檢測[9]中。以下是HOG特征提取具體的實現方法:
第一步:計算圖像像素點的梯度幅值與梯度方向:求出像素點橫坐標和縱坐標方向的梯度,據此計算每個像素(x,y)位置的梯度幅值和梯度方向。
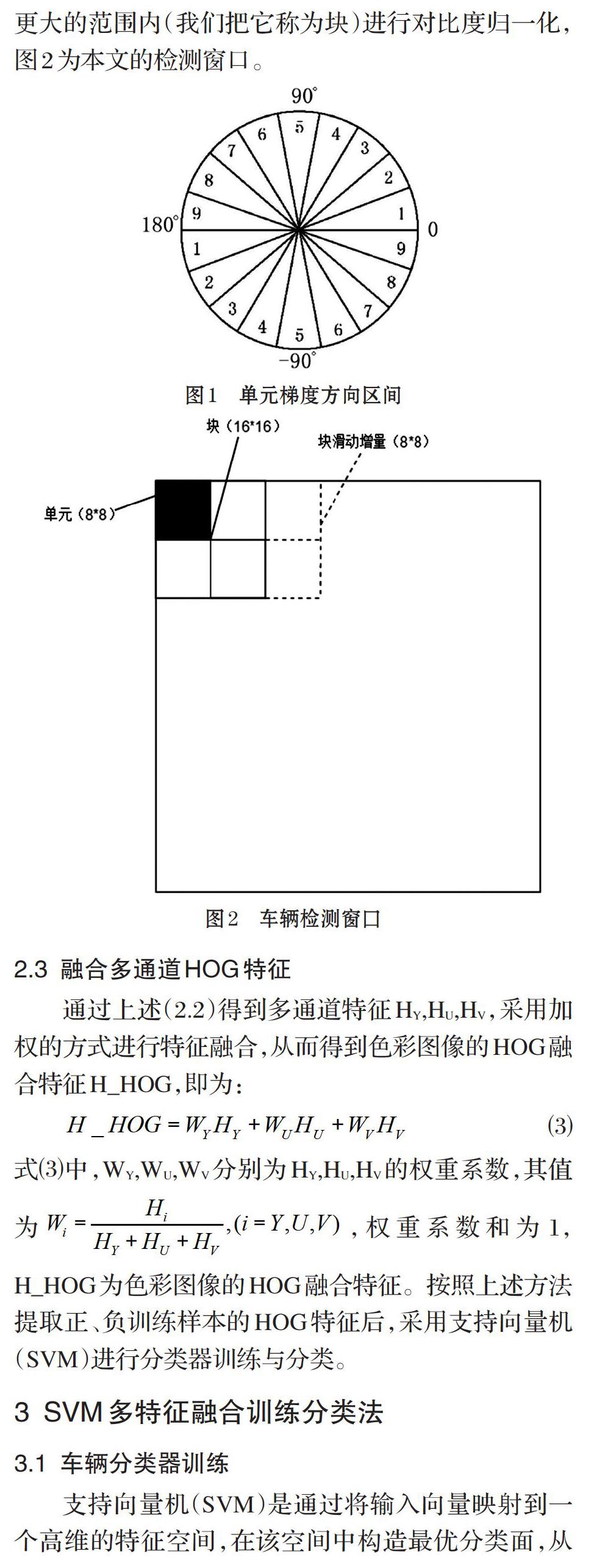
第二步:將梯度方向均勻量化成9個方向(如圖1所示),每個像素采用梯度幅值加權的方式進行投票,計算出計算各方向梯度積分圖。
第三步:首先將圖像分成小的連通區域,稱之為細胞單元,然后獲取單元中每個像素的梯度或邊緣方向直方圖。最后組合這些直方圖形成特征描述器。為了提高性能,我們還可以把這些局部直方圖在圖像更大的范圍內(我們把它稱為塊)進行對比度歸一化,圖2為本文的檢測窗口。
2.3 融合多通道HOG特征
通過上述(2.2)得到多通道特征HY,HU,HV,采用加權的方式進行特征融合,從而得到色彩圖像的HOG融合特征H_HOG,即為:
式⑶中,WY,WU,WV分別為HY,HU,HV的權重系數,其值為,權重系數和為1,H_HOG為色彩圖像的HOG融合特征。按照上述方法提取正、負訓練樣本的HOG特征后,采用支持向量機(SVM)進行分類器訓練與分類。
3 SVM多特征融合訓練分類法
3.1 車輛分類器訓練
支持向量機(SVM)是通過將輸入向量映射到一個高維的特征空間,在該空間中構造最優分類面,從而實現二類或多類的分類。為了滿足HOG特征和檢測速度的需求,本文選用線性SVM二分類,進行HOG特征的訓練分類。對于線性二分類,為了使得所有的訓練樣本都能被正確地分類,轉化為一個二次型優化問題:,則約束條件為:
3.2 支持向量機(SVM)參數優選
選取合適的參數可以得SVM具有較強的分類能力和泛化能力,當參數C越小時,分類器對樣本數據中誤判的樣本懲罰程度就越小,訓練誤差則變大;當參數C越大時,表示對錯誤例懲罰程度越大,可能會導致模型過擬合的情況。而核參數σ主要影響樣本數據在高維特征空間中分布的復雜程度。本文采用的是文獻[10]中在 LibSVM工具箱中,通過網格搜索和交叉驗證的方法得到的最優參數,其驗證精度為95.89%。
4 實驗結果與分析
本文的實驗程序是在python3.6下實現的,性能測試實驗在Inter(R) core i5 CPU、2G內存,64位Windows 10操作系統的計算機上運行。其中訓練和測試的正負樣本均使用GTI數據庫中的圖片,各800張,大小都是,其中正樣本包括顏色不同的越野車、轎車、貨車等;負樣本為包含路邊樹木、道路路面、護欄等背景圖。
為了證明本文算法的有效性和可行性,實驗從兩個部分驗證:
⑴ 將本文算法與傳統HOG檢測車輛算法進行對比實驗,分別統計得到車輛檢測的結果如表1,從表可知本文算法在檢測率和誤檢率兩項指標均優于傳統算法。
⑵ 測試選自不同天氣情況下的車輛前置攝像頭的真實數據,結果如圖3所示(分別為晴天、霧天、雨天),均取得良好的檢測效果。
5 結束語
針對實際應用中對于車輛檢測的檢測效率和準確率,本文在提取的梯度輪廓特征的基礎上加以改進,在多分辨率下提取融合的YUV色彩空間的HOG特征,比傳統的HOG特征包含更多色彩信息,能有效避免傳統提取算法干擾物對檢測效果的影響。經過多次實驗,證明了檢測的準確率有明顯提高,能適應不同天氣的條件且具有較好的魯棒性,在總體性能上有較大的提升。但本文算法對前方較多車輛和重疊嚴重的情況下檢測不太理想,這將作為后續的研究重點,進而提高車輛檢測系統的性能。
參考文獻(References):
[1] Li Xing,Guo Xiao song. A HOG feature and SVM based method for forward vehicle detection with single camera [C]//IEEE International Conference on Intelligent Human -Machine Systems and Cybernetics,2013:263-266
[2] 楊強,齊美彬,蔣建國.一種用于車輛檢測的選擇性背景更新方法[J].合肥工業大學學報(自然科學版),2011.34(4):509-514
[3] Han S, Han Y, Hahn H. vehicle detection Method using Haar like Feature on Real Time System[J].Engineer and Technology,2009.59:455-459
[4] Guo D,Fraichard T,Xie M,et al. Color Modeling by Spherical Influence Field in Sensing Driving Environment[C]//Proceedings IEEE Intelligent Vehicle Symposium.2000:249-254
[5] Handmann U,Kalinke T,Tzomakas C,et al. An Image Processing System for Driver Assistance [J]. Image and Vision Computing,2000.18(5):367-376
[6] Wu Jun-wen,Zhang Xue-gong. A PCA Classifier and Its Application in Vehicle Detection[C]//Proceeding IEEE International Joint Conference on Neural Networks,2001:600-604
[7] Gepperth ART. Co training of context models for real timevehicle detection[C]//2012 IEEE Intelligent Vehicles Symposium,2012:814-820
[8] Zhu Qiang,Yeh Meichen, Cheng K-T. Fast Human Detection Using a Cascade of Histograms of Oriented Gradients[C]//proceedings IEEE International Conference on Computer Vision & Pattern Recognition,2006.2:1491-1498
[9] 陳龍,潘志明,毛慶洲等.利用HOG LBP自適應融合特征實現禁令交通標志檢測[J].武漢大學學報(信息科學版),2013.38(2):191-194
[10] 李星,郭曉松,郭君斌.基于HOG特征和SVM的前向車輛識別方法[J].計算機科學,2013.40(11):329-332
