磁懸浮陀螺全站儀定向成果質量控制方法
2018-12-20 10:59:40何金學張齊勇時丕旭
鐵道勘察 2018年6期
何金學 張齊勇 時丕旭
(中鐵第一勘察設計院集團有限公司,陜西西安 710043)
進入21世紀,高精度的陀螺全站儀越來越廣泛地應用于超長隧道的工程建設中[1]。隧道貫通測量中,通常需要布設多條長距離導線,受地下測量條件的限制,導線的圖形強度較弱,點位精度較差,而通過加測陀螺定向邊,可減少測角誤差積累,提高隧道洞內平面控制網的貫通精度及可靠性[2-3]。目前,相關學者對陀螺全站儀及其應用進行了大量研究,如陀螺定向在地下鐵道盾構施工測量檢測中的應用[4]、井下控制測量中陀螺儀的應用[5]、加測陀螺邊對礦山導線測量的精度研究等[6]。以上研究主要為陀螺儀在工程中的應用,很少有文章對陀螺全站儀定向過程的質量控制方法進行研究[7-11]。以下從陀螺全站儀的定向原理與定向過程出發,提出陀螺定向成果質量控制方法,以保證陀螺定向成果的質量。
1 磁懸浮陀螺全站儀定向原理
GAT高精度磁懸浮陀螺全站儀采用磁懸浮支撐技術來代替傳統懸掛帶技術,在地球自轉效應的影響下,陀螺旋轉軸產生向測站點子午線方向逼近的指向力矩
M=H×ωecosφsinα
(1)
式中,M為指向力矩;H為陀螺角動量;ωe為地球自轉角速度;φ為測站點地理緯度;α為陀螺馬達軸與子午線北方向的夾角。
在指向力矩M的作用下,陀螺馬達軸會向子午面方向產生進動效應。而此時力矩器通過靜電力矩反饋控制技術對靈敏部施加反向力矩M′,使M′=-M,此時陀螺靈敏部處于平衡狀態。通過力矩器測量的反向力矩M′和公式(1),即可計算出陀螺馬達軸的北向偏角[12]
(2)
通過陀螺角動量,可測定任意測線的陀螺方位角。如圖1所示,大圓代表陀螺水平盤,小圓表示全站儀水平度盤,理論上二者應為同心圓。OT為陀螺尋北方向;OM為陀螺馬達軸方向;OL為全站儀水平度盤零位方向;OC為全站儀望遠鏡照準目標的測線方向。
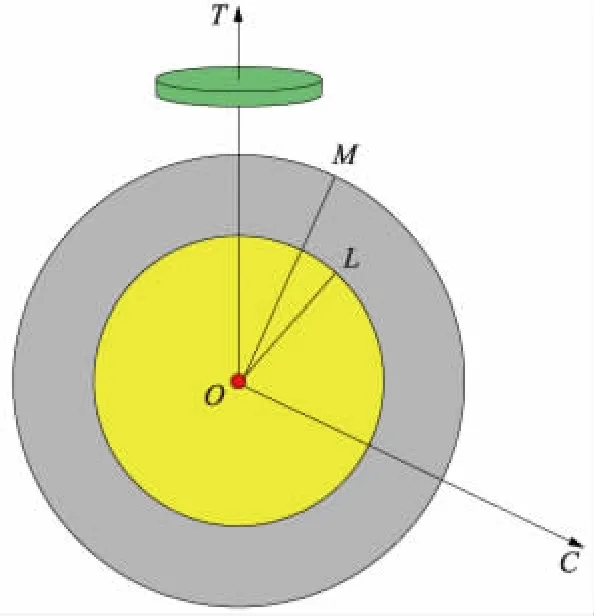
圖1 GAT陀螺全站儀軸系結構示意
在定向過程中,首先測量出OM軸與陀螺北方向的夾角∠TOM,再利用全站儀測定角度∠LOC,有
∠TOM+∠MOL+∠LOC+Δ儀=A真=α+γ
(3)
式中,α+γ為坐標方位角與子午線收斂角之和,利用測站點的坐標計算子午線收斂角,便可得出導線邊的坐標方位角[13]。
2 磁懸浮陀螺全站儀定向成果質量控制
2.1 磁懸浮陀螺定向測量過程
陀螺定向的基本流程可分為地面儀器常數的標定和地下定向邊定向測量。磁懸浮陀螺定向總體過程如下:
(1)在地面常數邊測量陀螺方位角(2~3測回),并求得兩個或三個儀器常數。
(2)在地下定向邊進行兩個測回的陀螺定向測量,得到兩個陀螺方位角,若有多條導線,依照同樣方法進行定向測量。
(3)返回地面后,應盡快在原常數邊上再進行兩測回或三測回的陀螺方位角測量,再得到兩個或三個儀器常數。
(4)利用儀器常數及子午線收斂角再進行計算定向邊的坐標方位角[14]。
2.2 陀螺定向成果質量控制
(1)測量前質量控制
磁懸浮陀螺全站儀出廠前,按照規范對儀器內部電子元器件、光學元器件等進行專業檢測。
經過長期使用后,儀器的內部元器件可能會由于長時間工作而老化,長途運輸、外界溫度、磁場等因素均有可能影響儀器的穩定性[15]。因此,測量前可在室內或室外進行重復精度檢核(5~10次重復觀測),依據的公式為
(4)
其中,An為儀器的單次測量值;Acp為多次測量的平均值;n為測量的次數。當2σ<5″時,說明儀器測量穩定性良好,可以進行高精度的陀螺定向測量。
(2)測量過程質量控制
①進洞前后常數邊陀螺定向成果對比
陀螺定向測量依據“3-2-3”的原則進行,即在地面常數邊進行3個測回的陀螺定向測量,然后在洞內定向邊進行兩個測回的測量,最后再回到地面常數邊進行3個測回的陀螺定向測量。進洞前后地面常數邊測量數據可以反映陀螺在洞內測量過程的穩定性,若常數邊進洞前后數據差異較大,說明測量成果不可靠,應重新進行陀螺定向測量。
②常數邊與檢核邊成果對比
對于長隧道的陀螺定向測量,由于距離較長(隧道進口與出口往往距離幾十公里),如果只選取進口端或出口端的地面導線邊作為陀螺定向測量的常數邊,往往難以反應隧道整體陀螺定向測量過程中儀器常數的變化情況。因此,可在隧道的進口端與出口端分別選擇常數邊與檢核邊(如圖2所示),依據常數邊與檢核邊對陀螺定向成果進行檢核并評估長距離隧道內儀器常數的變化規律。
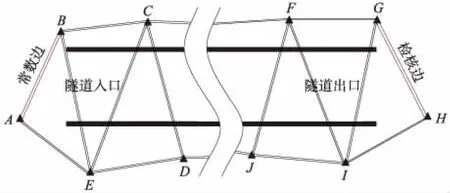
圖2 常數邊與檢核邊示意
③洞內對向觀測檢核
隧道洞內導線邊的陀螺定向可采用對向觀測的方法,即在地下導線邊的兩端分別設立測站,各進行兩個測回的陀螺定向測量(導線邊有4個測回的定向數據)。一方面可以提高觀測精度,另一方面可以利用對向觀測方位角互差(180°),對洞內觀測成果進行檢核[11]。
(3)計算成果檢核
測量完成后,可通過儀器的內置程序自動計算出陀螺定向成果。也可將儀器內部存儲的數據導出,與記錄數據核對,利用與儀器程序中不同的計算方法重新計算,并與儀器程序計算成果進行檢核。
3 磁懸浮陀螺全站儀在引漢濟渭輸水隧洞中的應用
以GAT磁懸浮陀螺全站儀在秦嶺引漢濟渭輸水隧洞工程中的應用為例,對陀螺定向成果的質量控制進行介紹。
3.1 工程概況
引漢濟渭工程是由漢江向渭河關中地區調水的陜西省內南水北調骨干工程,設計長度為81.78 km,采用隧道的方式穿越秦嶺主峰。為保證隧道的順利貫通,根據現場施工情況,采用GAT高精度磁懸浮陀螺全站儀對5號洞內X21-Z→X20-1Z導線邊、6號洞內J35-Y→J34-Z導線邊進行陀螺定向;選擇5號洞NGPS015-1→NGPS014已知測線作為儀器常數邊,7號洞口已知邊NGPS018→NGPS019作為檢核邊對測量成果進行檢驗(如圖3所示)。
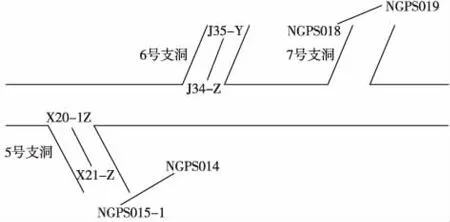
圖3 地面洞內陀螺定向邊示意
結合工程實際需求,對陀螺定向作以下限差要求:同一條邊任意兩測回陀螺方位角的互差不得超過10″;測前方向值與測后方向值之差不得大于10″,超限數據應在現場予以補測。
3.2 陀螺定向成果精度評定
(1)測前重復精度檢核
測前可在室內或室外進行重復精度檢核,本次進行了5次重復觀測,并對其穩定性進行分析(如表1)。
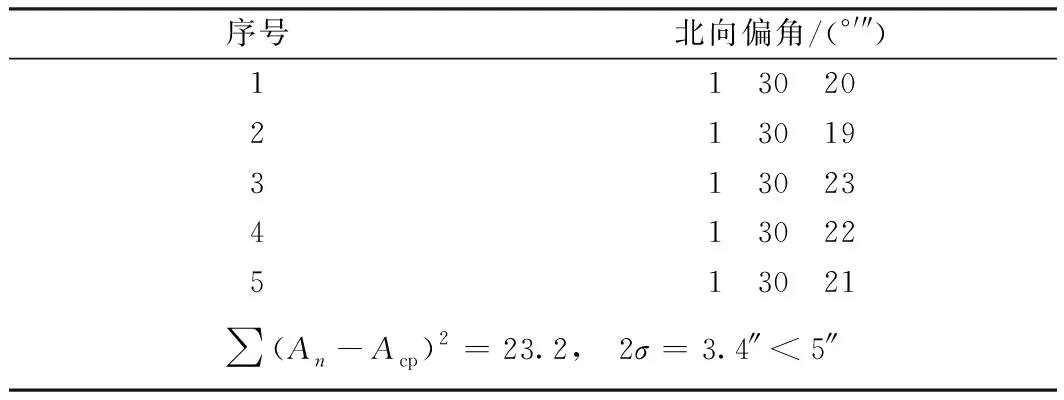
表1 測前重復精度檢核
檢測結果表明儀器穩定性良好,可以進行高精度的陀螺定向測量工作。
(2)儀器常數的檢核
選擇5號洞口的NGPS015-1→NGPS014為常數邊,7號洞口的NGPS018→NGPS019為檢核邊。依據地面控制點坐標計算常數邊坐標方位角及測站點子午線收斂角,便可得到常數邊的真北方位角。再根據公式A=T+Δ(T為測線的陀螺定向值,Δ為陀螺全站儀的儀器常數),結合陀螺定向測量的地面定向成果,可計算陀螺儀器常數,并對陀螺定向測量進行精度評定[16](如表2所示)。
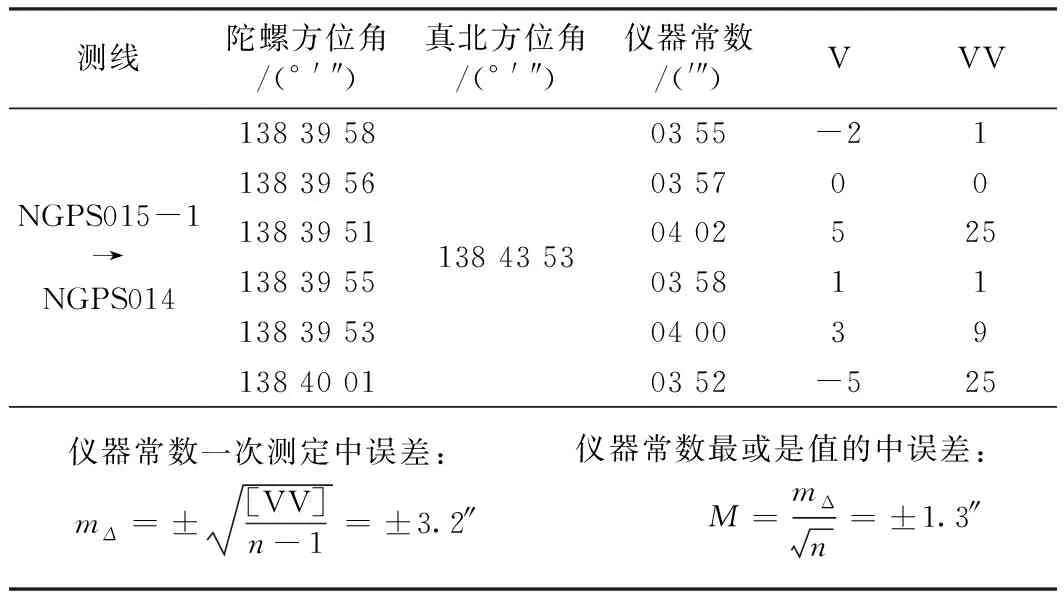
表2 儀器常數精度檢核
同理,利用檢核邊“NGPS018→NGPS019”坐標方位角以及測站點子午線收斂角,可計算陀螺儀器常數
Δ=A-T=0°04′04″
兩次儀器常數最大較差值為7″,說明儀器常數測量可靠性較高。
(3)陀螺定向成果穩定性分析
依據地面、洞內多條雙次測定陀螺方位角的差值,可利用雙觀測列計算出陀螺定向中誤差
(5)
根據誤差傳播理論,綜合地面和洞內觀測成果,本次陀螺定向精度為
(6)
上式中,nΔ為地面常數邊的測回數;n為定向邊測定陀螺方位角的測回數。
(4)洞內陀螺定向成果檢核
對洞內兩條定向邊X21-Z→X20-1Z和J35-Y→J34-Z進行對向觀測,兩條定向邊的對向觀測較差分別為-9″和4″,如表3所示。測量成果符合限差要求,定向成果可靠。
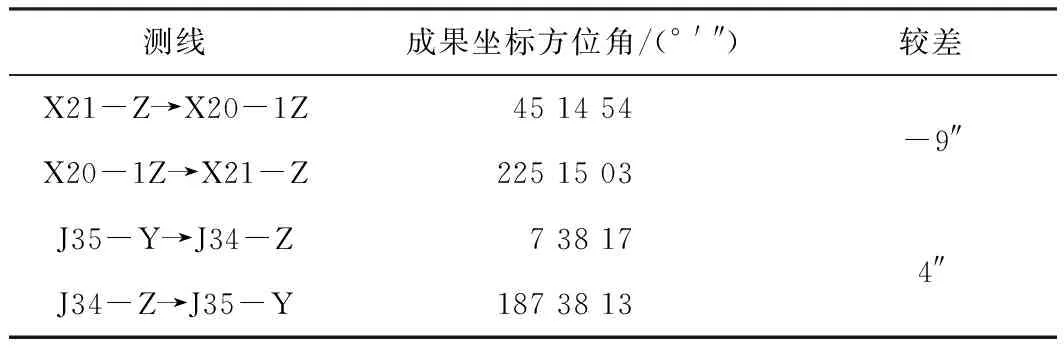
表3 洞內導線對向觀測坐標方位角較差
上述計算通過儀器內置程序和人工計算兩種手段進行,成果可相互驗證。
3.3 定向成果分析
本次引漢濟渭輸水隧洞工程中地面常數邊共進行了6個測回的定向測量,儀器常數一次測定中誤差為3.2″,利用地面與洞內雙觀測列數據聯合解算得陀螺定向中誤差為2.5″,定向邊方位誤差為1.4″。最終陀螺測定導線X21-Z→X20-1Z和J35-Y→J34-Z與原坐標方位角相差分別為-4″和-15″,說明隧道洞內總體測量精度較高。原6號支洞內導線J35-Y→J34-Z測量存在一定的誤差累積,可參考本次陀螺定向成果重新進行導線平差。
4 結論
首先闡述了隧道對高精度陀螺定向的需求,提出了陀螺定向成果質量的控制措施,分別從測量前的儀器檢定、重復性精度觀測、測量過程中的常數邊對比、對向觀測以及測量后的成果計算等方面進行檢核。引漢濟渭工程的應用實踐證明:GAT磁懸浮陀螺全站儀能夠有效控制導線測量的誤差累積,并且適用于各類超長隧道的貫通測量。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
