六自由度機器人NURBS軌跡規劃研究*
2018-12-20 06:28:02任書嫻
現代制造技術與裝備 2018年11期
樂 英 任書嫻
(華北電力大學 能源動力與機械工程學院,保定 071000)
規劃機器人運動軌跡的目的是研究可靠的方法提高機器人運動軌跡的精度和穩定性,使各關節位移、速度、加速度、加速度曲線光滑連續無突變,避免因為突變導致的機械磨損和振動沖擊[1]。機器人軌跡規劃通常分為笛卡爾空間的軌跡規劃和關節空間的軌跡規劃。這里我們對關節空間進行軌跡規劃[2]。
機器人常用軌跡規劃方法包括多項式、樣條曲線和不同曲線相結合的方法。在實際工程中常采用多項式進行規劃。在曲線拐角處采用五次多項式過渡法進行軌跡規劃[3]。采用五次多項式對SCARA機器人關節空間進行軌跡規劃研究[4]。采用七次多項式規劃機器人關節軌跡,此法易發生“龍格現象”[5]。采用三次B樣條插補規劃出機器人的時間—平滑性綜合最優軌跡[6]。文獻采用三次非均勻有理B樣條規劃機器人關節軌跡。由于這些方法的加速度曲線或者加加速度曲線有突變,故得到運動軌跡效果不夠理想[7]。
針對運動軌跡不夠平滑和精度不高的問題。本文以實驗室六自由度機器人為研究對象,基于MATLAB平臺采用五次NURBS規劃機器人關節軌跡,并與五次多項式規劃的機器人關節軌跡進行對比分析,選擇效果更好的軌跡規劃方法。
1 關節空間軌跡規劃
采用五次多項式、五次NURBS規劃機器人關節軌跡時,由已知的笛卡爾空間原始路徑點,通過機器人逆解原理求解出關節空間的各關節位移值,結合不同規劃方法的求解算法,求出相應的速度及加速度得到不同的關節運動軌跡曲線。
1.1 五次多項式樣條
五次多項式樣條中,任意兩節點間曲線段由五次多項式擬合生成,五次多項式表達式中共有六個未知系數,對其求一階、二階求導得到機器人末端關于時間t的速度、加速度表達式如式(1)~式(3)所示[8]。

式中,與起始和終止時間點t0、tf對應的角位移θ0和θf為已知,且滿足條件如式(4)所示。

在每段多項式起始點和終止點處滿足二階連續,設置
始末點的速度、加速度,且滿足條件如式(5)所示。

已知每個點的角位移值,設定其角速度和角加速度為0,兩點共可得到六個已知條件。將已知條件代入公式(1)、(2)、(3)中并聯立求解,解出所有未知系數。
1.2 五次NURBS
NURBS也稱非均勻有力B樣條,如式(6)所示。

式中,di為控制頂點,Ni,k(u)為k次規范B樣條基函數,且相互之間的關系如式(7)所示。
式中,k表示NURBS次數,i表示序號。
根據關節位移-時間節點序列{pi,ti}反算NURBS控制頂點,t=0,1,2…n。反算控制頂點時使首末端點與首末數據點一致,使曲線的分段連接點與相應的內部數據點一致,即pi有節點值uk+i,i=0,1,…n
NURBS插值曲線由n+k個控制頂點di(i=0,1,2,…n+k-1)定義,節點矢量相應為U=[u0,u1,…un+2k]。
設機器人的總運動時間為tall=tn-t0,采用累計弦長參數化方法對時間節點ti歸一化,得到節點矢量U=[u0,u1,…un+2k]。具體表達式如式(8)所示。
用于插值n+1個數據點pi的k次NURBS曲線方程如式(9)所示。

將曲線定義域[uk,un+k]內的節點值依次代入方程,得到滿足插值條件的n+1個方程,如式(10)所示。

對于k次NURBS開曲線還需增加k-1個通常由邊界條件給定的附加方程,附加方程通過切矢邊界條件得到,因取兩端節點重復度為k,其首末控制頂點就是首末數據點,如式(11)所示。
同理可得相關表達式如式(12)所示。
已知所有點角位移和設定的角速度、角加速度值代入式(10)~式(12)中聯立求解出NURBS插值曲線的控制頂點,對得到的NURBS曲線依次求導,得到機器人運動軌跡的速度、加速度、加加速度曲線[9]。
2 機器人建模與仿真
以實驗室REBOT-V-6R機器人為研究對象,通過D-H法建立機器人的三維模型,該機器人各關節及連桿參數如表1所示。
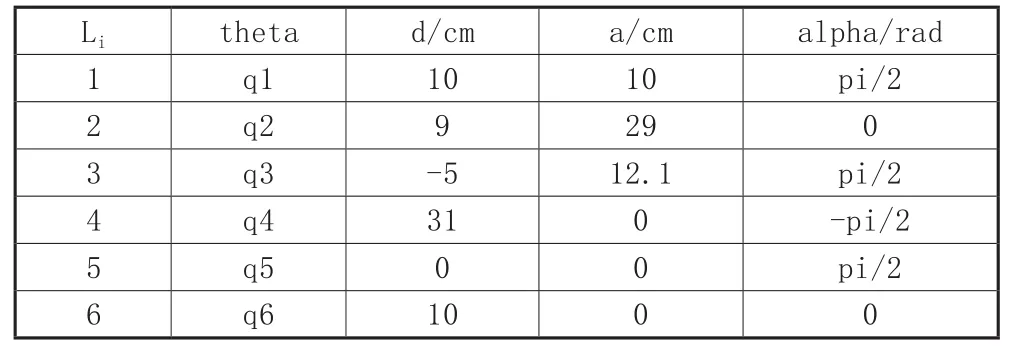
表1 REBOT-V-6R機器人的D-H參數表
其中,Li為各關節的編號,theta為關節變量,d為連桿的偏移量,a為連桿的長度,alpha為連桿的扭角。
通過MATLAB中的robotics toolbox工具箱和機器人的各連桿參數建立機器人模型并給機器人命名為“robot”[10]。如圖1所示。
在建立的機器人模型的平臺上,以機器人末端為作業點,使末端在三維空間中畫一個三角形,畫圖過程中機器人末端的姿態保持不變。設p1,p2,p3為三角形的三個頂點,其坐標依次為:
p1=[4.1 -4 4.11];
p2=[4.1 2.6 4.11];
p3=[1.1 2.6 4.11]。
在三角形的每條邊上,等距離的取10個中間點,間隔距離固定為0.3cm,三條邊一共得到30個點。Z方向坐標值均為4.11。接著用工具箱中的ikine函數,即Q=bot.ikine(T,q)反求出與末端路徑點對應的各關節角度值,得到30×6個關節位移值,結合不同軌跡規劃方法的求解算法求出速度和加速度,得到各關節代表不同含義的曲線。我們任意截取一段時間段,這里取的是在t=[2.5s,3.5s]時間段里兩種樣條函數規劃的關節1、2、3的軌跡運動圖,如圖2、圖3所示。
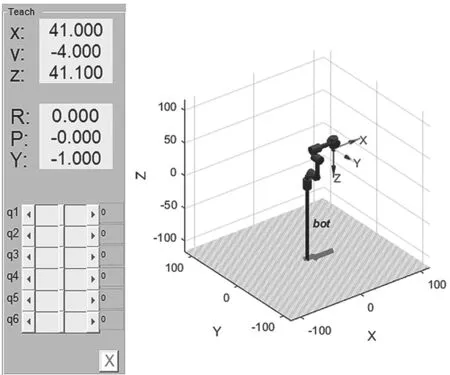
圖1 機器人示教界面
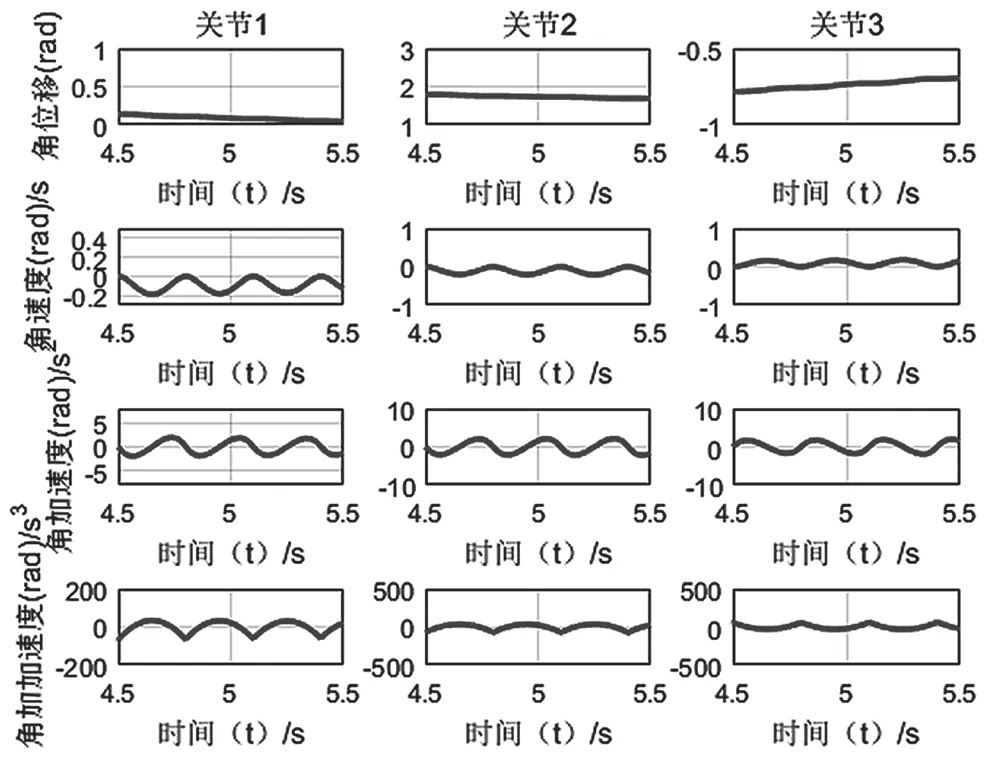
圖2 截取的五次多項式規劃1-3關節運動曲線
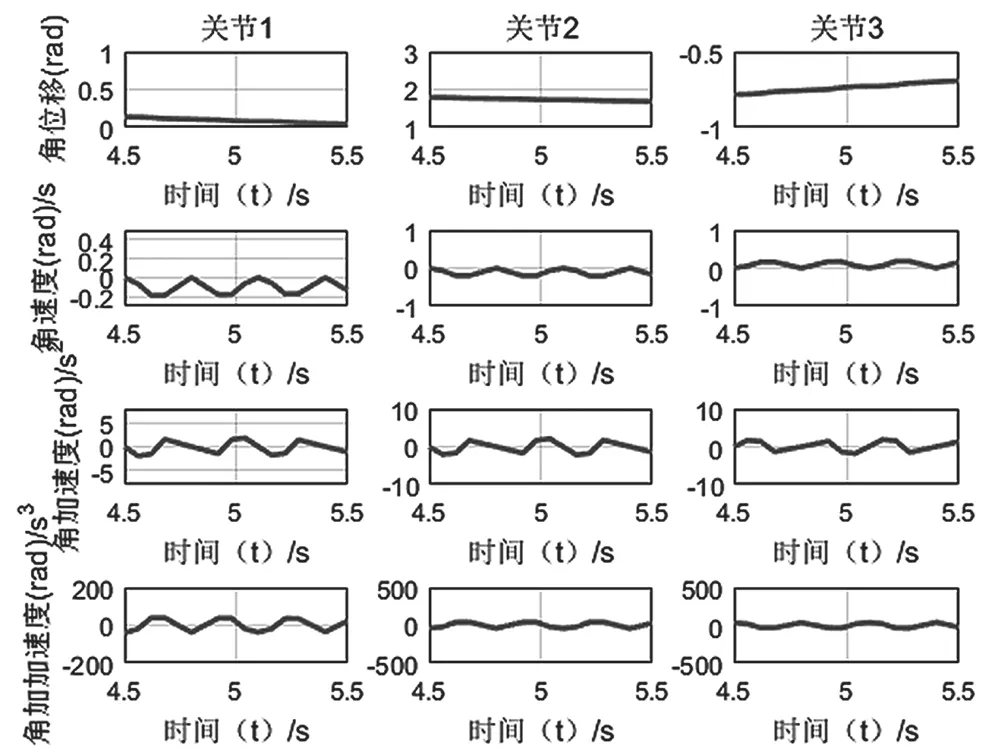
圖3 截取的五次NURBS規劃1-3關節運動曲線
從圖2、圖3中可以看出,在2.5~3.5s時間段內,兩種規劃方法得到的角位移、角速度、角加速度曲線趨勢差別不大。但對比兩種規劃方法得到的加加速度曲線可知,五次多項式規劃的軌跡的加加速度有突變,這會導致機器人運動時產生振動沖擊。而五次NURBS規劃的軌跡的加加速度是連續無突變的。所以,五次NURBS軌跡規劃方法穩定性更好。
得到180組關節位移數據后,通過工具箱中的fkine函數,即T1=bot.fkine(q1)求出與180組關節位移數據對應的180個工作空間坐標點。得到的空間坐標點均為規劃的機器人末端軌跡點。機械手末端軌跡圖如圖4、圖5所示。
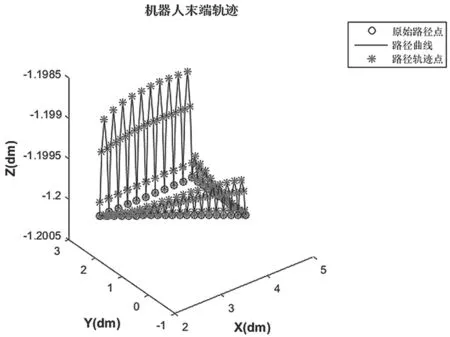
圖4 基于五次多項式的機器人末端軌跡
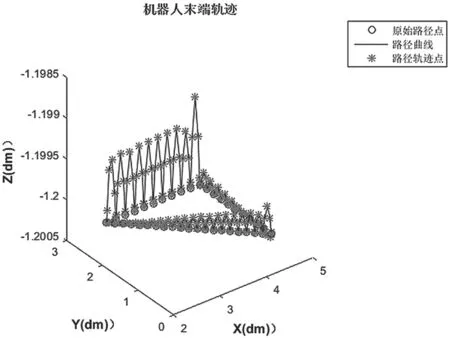
圖5 基于五次NURBS的機器人末端軌跡
通過比較圖4、圖5可以看出,五次NURBS規劃的三角形各邊的軌跡誤差比五次多項式規劃的三角形各邊的軌跡誤差要大,說明五次NURBS規劃的軌跡精度更高,穩定性更好,要優于五次多項式的軌跡。所以,選用五次NURBS軌跡規劃方法得到的軌跡精度更高更穩定,也使機器人性能更穩定,壽命更長。
3 結論
為提高機器人運動軌跡的穩定性和精度,延長機器人的使用壽命。以實驗室的六自由度機器人為研究對象,分別采用五次多項式,五次NURBS規劃機器人的運動軌跡,并在MATLAB平臺上編程得到關節軌跡圖片進行對比。結果表明:采用五次NURBS規劃運動軌跡的角位移、角速度、角加速度都較光滑,且角加加速度連續沒有突變,優于角加加速度有突變的五次多項式軌跡規劃方法。綜合考慮效果和計算量,五次NURBS軌跡規劃方法的運動性能優于五次多項式軌跡規劃方法,五次NURBS是精度較高且穩定可靠的軌跡規劃方法。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
