關節式磚坯碼垛機器人控制系統的設計*
2018-12-20 06:28:04陳雪松侯榮國
現代制造技術與裝備 2018年11期
陳雪松 侯榮國 張 宇 王 濤 楊 鵬
(1.山東理工大學 機械工程學院,淄博 255049;2.山東嘉豐玻璃有限責任公司,淄博 255000)
1 研究背景
工業機器人主要用于代替操作工人來完成工業生產中的一些危險、重復率大的步驟,其中,在磚坯產業,碼垛機器人被廣泛使用。作為碼垛技術物流自動化技術中的新興技術,碼垛機器人按照一定的堆疊模式標準,將磚坯堆疊在一起,實現的裝卸、搬運、運輸、儲存等物流工作[1-3]。近年來,操作工人的人工費持續高漲對我國磚瓦行業的沖擊非常大,其中,卸磚和碼磚環節尤其工人減少尤其明顯。磚坯生產線的產量越高,需要的人員就越多,而磚廠的招工卻越來越難。因而,磚廠不得不進行技術改造,新建磚坯碼垛、缷垛自動生產線來解決這一難題。關節型磚坯碼垛機存在占地少,結構緊湊,有利于車間的良好布局;搬運速度很快,能夠大幅度提高生產效率,對促進磚坯生產的自動化生產線有重要貢獻。機器人的控制系統對碼垛機器人工作非常重要,其運算速度對工作效率影響非常大,因此,設計高性能、高效率的控制系統,開發人機友好的界面非常必要[4]。本文將研發關節式碼垛機器人的控制系統,使其具備可示教、可編程功能,全面提升制磚設備的自動化、智能化水平,進一步提高制磚工作效率,降低工作成本和工人的勞動強度。
2 碼垛機器人控制系統工作原理
碼垛機器人控制系統包括示教盒系統和控制器。如圖1所示,示教盒系統是碼垛機器人主要的人機接口,通過示教生成機器人工作文件。控制器主要負責將運動規劃插補好的數據轉換為碼垛機器人四個軸的伺服電機的脈沖,把分配好的脈沖送到相應的伺服電機驅動器完成位置控制以及讀取機器人的位置反饋信息[5-6]。
碼垛機器人控制器采用上下位機結構,控制系統機構如圖2所示,主要完成人機界面的處理、周邊設備信號的交互以及機器人本身的運動控制。硬件主要由工控主機、運動控制卡、I/O接口卡、手持觸摸式示教盒、控制柜及電源控制電路等組成。
3 碼垛機器人控制系統軟件構成
碼垛機器人控制軟件是控制器中很重要的組成部分。它既要對碼垛機器人的軌跡、速度進行精確控制,也要提供非常友好的人機界面,還要包括完備的故障診斷和報警提示功能[7-8]。碼垛機器人軟件分為系統控制軟件和示教盒控制軟件。系統控制軟件運行在主控計算機上,示教盒控制軟件運行在示教盒控制板上[9]。如圖3所示,系統控制軟件主要完成運動學和動力學計算、碼垛機器人本體的位置和速度控制、故障的實時診斷和處理、與示教盒之間的通信處理以及調試用的人機界面處理等。根據不同功能分為7個模塊 1.初始化模塊;2.故障診斷模塊;3.文件管理模塊;4.語言解釋模塊;5.軌跡規劃模塊;6.通訊模塊;7.脈沖生成模塊。
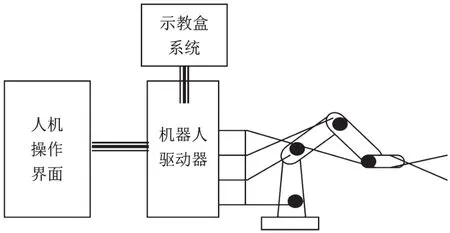
圖1 碼垛機器人控制系統機構圖
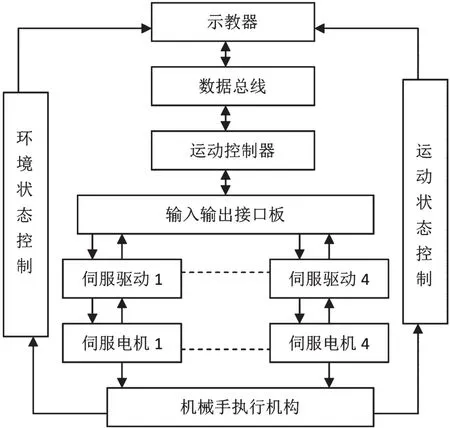
圖2 碼垛機器人控制器結構圖
4 示教盒的軟件設計
示教盒控制軟件主要完成人機界面的處理、與控制器之間的通訊處理(包括通訊協議的制定)、編程方式的設定等,控制軟件結構如圖4所示[10-11]。根據不同功能分為7個模塊:1.初始化模塊;2.精確定時模塊;3.I/O和位置處理模塊;4.文件編輯模塊;5.參數設置模塊;6.錯誤處理模塊;7.通信模塊。如圖5所示,通過串口和示教盒之間進行通訊,將接收到的控制指令按照軟件設計的要判斷是控制指令的類型,調用相應的控制指令子程序實現對各軸運動參數的修改、運動方式的控制和示教點位置信息的存儲。此外,在保存當前的示教點特征時,用一個結構體來記錄數據。
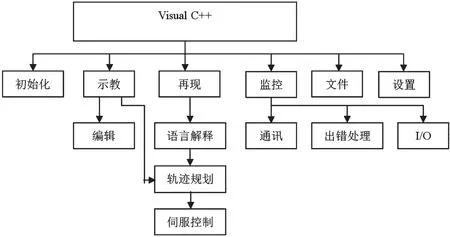
圖3 碼垛機器人軟件控制系統結構圖
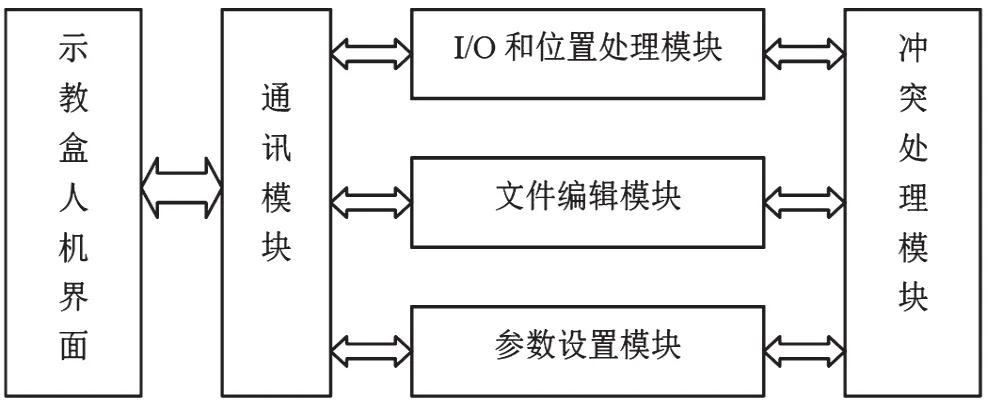
圖4 碼垛機器人示教盒控制軟件結構圖

圖5 碼垛機器人示教盒流程圖
5 碼垛機器人人機操作界面的開發
機器人的人機界面開發是機器人工作操作者和機器人動作的結合點,是實現人與機器人通訊的主要方法。本碼垛機器人所使用的編程語言是VC++。操作界面如圖6所示。

圖6 操作界面
6 結論
通過開發磚坯碼垛機器人控制系統,使其具備可示教、可編程功能,實現制磚工作的自動化、智能化,提高制磚工作效率,減少工人的勞動強度。利用上位機操作界面和示教盒控制界面等雙界面模式,有助于提高制磚工作的精細化程度,提高保障磚坯制造質量,降低廢品率,對制磚行業的環保化、綠色化有積極的推動作用。
