基于云技術的多參數感知機器人設計研究
2018-12-20 07:55:02何偉宏賴勝南張澤滔
電子設計工程 2018年24期
關鍵詞:系統
何偉宏,賴勝南,張澤滔
(中山大學南方學院,廣東廣州510970)
隨著世界各國人力成本的大幅提高,當今各行業應用機器人的需求從傳統的工業制造領域到空間探索搜救、健康醫療康復、環境智能監控領域都在迅速增長[1-3]。機器人技術作為戰略新興產業、高新技術之一,是未來工業智能制造發展的方向,對于社會經濟發展具有重要意義。
傳統的機器人已經解決自身的定位和行進問題,對于機器人間的協同作業、機器人的人機交互、機器人通過多傳感器對外部環境感知的海量信息的有效處理和傳輸等問題已成為研究的熱點。文中基于云技術的系統架構和用戶關鍵信息多傳感器數據采集方法,對多參數感知機器人的設計進行了深入研究,利用嵌入式技術進行系統軟硬件的實現,通過實際測試機器人尋跡定位導航、環境感知預警、數據云存儲、無線通信控制等功能,驗證本設計實現了預期功能。
1 感知機器人架構
傳統機器人往往只能依靠固定編程及機械完成特定的任務,借助于人類處理過的信息,完成精確指令和任務。隨著信息技術的發展,借助于互聯網[4]、云計算[5]、對機器人的遠端控制監控、實時信息反饋。基于云技術的機器人更加小型化,能有效降低成本,幫助機器人提高自學能力、適應能力,推動其較快的大規模普及應用[6]。基于云技術的機器人能提高其對復雜環境的適應性,必將成為機器人未來的發展趨勢[7]。
感知機器人系統云架構[8]由感知層、網絡層、云技術層和應用層4個部分組成,如圖1所示。

圖1 機器人系統云架構示意圖
1.1 應用層
應用層(Application Layer)位于本系統四層結構中的最頂層,其功能主要為交互[9]。應用層與最底端的感知層一起,是系統中的用戶能直觀感受的部分和核心所在。
文中應用層一般由移動終端、調度中心、管理軟件等組成。通過應用層軟件將獲取到的信息可視化,為用戶提供直觀的實時數據查詢、預警信息顯示,提供遠程控制指令信息,達到遠程監控信息的實時交互。
1.2 云技術層
云技術(Cloud technology)是指在廣域網或局域網內將軟硬件、通信網絡等資源統一起來,實現數據的計算儲存、分析處理和交流共享的一種托管技術。其重要支撐是云計算[10](Cloud Computing)技術,云計算結合網絡存儲技術和虛擬化技術,通過互聯網提供方便快捷的計算資源[11]。
云計算為本系統提供了一種轉移并減少機器人運算壓力,減低計算成本的模式,使本系統在軟硬件開發時屏蔽掉了數據存儲轉發等流程,通過訪問云服務器用戶可以相對安全且快速獲得機器人系統感知到的實時數據和歷史數據[12]。
本系統中云技術層可以對感知層采集數據進行運算存儲、分析處理和知識挖掘以供應用層隨時隨地的調用。
1.3 網絡層
本系統中,網絡層的主要任務是數據的傳輸,把感知層感知到的數據安全可靠、方便快速地進行傳送,實現機器人系統與云服務器、移動端的連接。網絡層(Network Layer)所涉及技術主要有蜂窩網絡、無線網絡和有線網絡3類。
1.4 感知層
感知層是本系統的核心,是環境信息采集的關鍵部分。感知層也稱為傳感層,包括基本的感應器件如攝像頭、GPS、RFID標簽和讀寫器、二維碼標簽和識讀器等傳感器件,由感應器組成的網絡如RFID網絡、傳感器網絡等兩大類別。主要涉及到射頻識別技術、傳感器技術、GPS技術、微機電系統、二維碼技術。
2 感知機器人系統配置與模塊設計
2.1 感知機器人系統硬件配置
多參數感知機器人實現機器人的自主運動、環境參數的采集、數據的處理和傳送功能,硬件系統包括核心處理器、電源模塊、環境感知模塊、通信模塊、運動控制模塊等,系統架構圖如圖2所示。

圖2 感知機器人系統架構圖
2.2 核心處理模塊
文中核心處理器選擇了Arduino Mega2560。Arduino Mega2560是采用USB接口的AVR系列處理器集成板具有16路模擬接口、54路數字接口,適用于本系統中多模塊、多傳感器對核心處理器外設資源豐富的要求,它也能兼容Arduino設計的擴展板,并且它的外設資源較為豐富,能滿足多參數感知機器人各模塊和大量傳感器對接口的需求。
2.3 多電壓電源模塊
多電壓電源模塊由4節蓄電池提供系統總電源,系統主板、核心處理器電壓通過AMS1117穩壓芯片[13]提供5 V電壓,升壓部分由XL6009芯片和外圍電路組成,為系統電機、移動模塊提供穩定的9 V電壓,降壓部分由穩壓芯片LP2985構成,提供部分傳感器需求的3.3 V電壓。本系統多電壓電源模塊電路如圖3所示。
2.4 多傳感器模塊

圖3 多電壓電源模塊電路圖
在多參數的感知機器人的設計中,需要使用大量的傳感器進行數據的采集,這些傳感器可以分為兩個類別,一類是對移動機器人本身的數據采集,被稱為內部傳感器,如GPS、陀螺儀、加速度傳感器等;另一類是對環境參數的采集,也被稱為外傳感器,如紅外線傳感器、超聲波傳感器等[14],部分傳感器選型如表1所示。
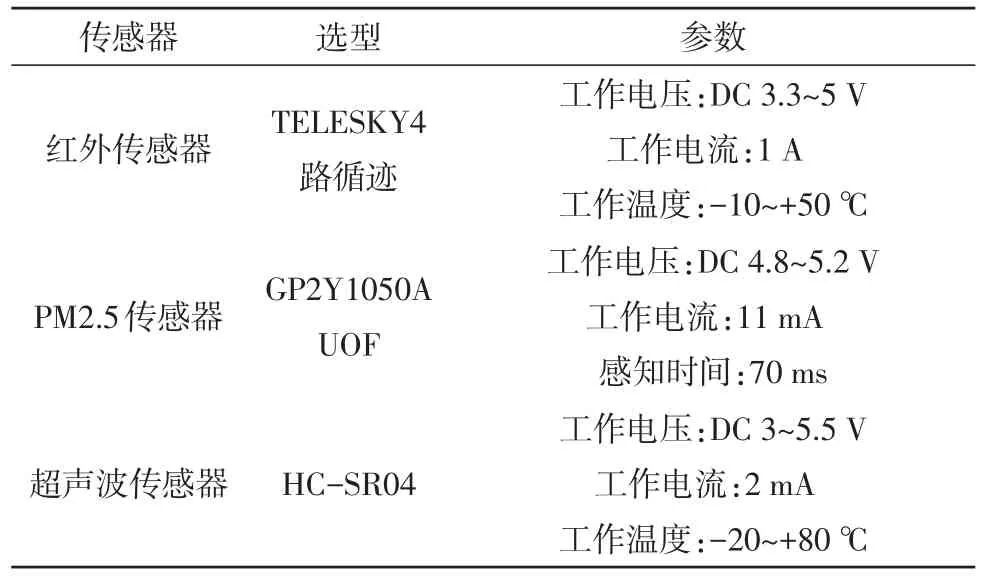
表1 傳感器選型
2.5 通信模塊
本系統通信模塊采用的是移動網絡中覆蓋范圍廣、速度快,可靠性高的移動WiFi技術[15]。文中采用無線通信WiFi模塊MW151RM對機器人與手機端進行數據采集與處理。
無線通信WiFi模塊和核心處理器的通信主要利用了WiFi模塊的串口(VCC、RX、TX、GND),無線通信WiFi模塊的作用是將串口轉化成無線WiFi信號。
2.6 運動控制模塊
2.6.1 運動控制模塊方案
本文的感知機器人運動的兩種運動模式分別是GPS導航模式和預定軌道尋跡模式。GPS導航模式中,通過給定目的地的經緯度,要求機器人能夠根據自身位置規劃最佳路徑,平穩的運動到目的地。預定軌道尋跡模式,要求機器人能夠按照提前預設的軌跡運行,當預設運行軌跡上存在障礙物時,要求機器人提前判斷預警,停止前進等待指令或另找路線繼續前進。
2.6.2 電機控制方案
本系統采用差分式的履帶輪式機構[16],通過核心處理器輸出脈沖寬度調制(PWM)控制電機來實現機器人的驅動,通過兩個電機的轉速差來實現機器人的轉彎。本系統采用L293DD組成雙電機驅動控制電路。
3 感知機器人軟件系統構建
3.1 軟件系統總體設計
機器人系統軟件的總體設計如圖4所示,分為5個部分:主程序部分、傳感器模塊程序、移動控制模塊程序、通信模塊程序和移動端程序。

圖4 機器人系統軟件的總體設計
3.2 移動端程序設計
3.2.1 移動端總體架構設計
1)多參數數據處理架構設計如圖5所示。
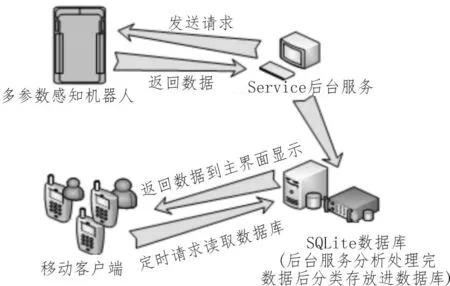
圖5 移動端總體架構圖
2)視頻監控:多參數機器人攝像頭通過WiFi數傳模塊傳送數據,移動APP后臺接收并處理圖像后,視頻監控圖像在移動APP上顯示。
3)遠程智能控制:通過移動客戶端發送控制指令,多參數感知機器人執行控制指令[17]。
3.2.2 具體功能設計
1)GPS定位及機器人位置顯示
用戶通過移動端獲知機器人的實時位置,然后通過GPS模塊[18]或者WIFI模塊把經緯度發送到云端或者移動客戶端,移動客戶端通過解析經緯度把機器人實時位置顯示到高德地圖上。
2)環境數據圖形化處理
文中移動端APP中主要通過構造坐標系的方法和在坐標系中畫折線圖的方法來實現數據圖形化的。
3)多參數智能預警
本系統移動端針對用戶關鍵參數設計實現了智能預警,通過移動端設置用戶興趣傳感器的預警閾值,當感知機器人所傳回該傳感器實時數據超過閾值時,移動端發出聲音震動、提示界面的預警動作。
4 感知機器人系統實機實驗
4.1 功能測試
該綜合實驗選用履帶式的移動機器人wi-robot作為多參數感知平臺,機器人本體上安裝了通信模塊、傳感器模塊以及攝像頭,這些模塊用于機器人與云服務器和移動端的無線通信通知[19]、遠程監控預警,機器人定位導航、循跡避障;現場實時圖像獲取,環境數據感知獲取。實驗模型感知機器人如圖6所示。

圖6 感知機器人實驗模型
4.1.1 環境感知
本系統實現的環境感知參數有機器人周圍空氣溫濕度、空氣中可燃氣體濃度值、空氣中PM2.5值、紫外線強度值、機器人涉水水位值,空間環境生命體征探測等。
多參數感知機器人系統中的GPS模塊工作實現定位,通過WIFI模塊把機器人當前經緯度數據發送到云服務器或者移動客戶端,移動客戶端通過云服務器或機器人發送來的經緯度把位置顯示到高德地圖上。
4.1.2 無線控制
無線控制實現了移動端對機器人的運動控制和視頻監控,通過TCP/IP協議向機器人發送控制指令,當移動端APP相應控制指令按鈕觸發時,即刻啟動SocketThread線程鏈接并發送相應控制指令,機器人系統通過WiFi模塊接收到指令,執行指令動作;機器人攝像頭實時捕捉當前畫面,通過無線通信實時傳回感知畫面到移動端供用戶查看。
4.1.3 云架構實現
機器人系統采集到的環境參數通過WIFI模塊上傳到中國移動提供的開放云平臺OneNET實現數據存儲、計算。本系統應用OneNET云平臺實現數據存儲。
4.2 性能測試
4.2.1 通信距離
發射端采用MW151RM無線WiFi發射模塊,接收端和分析采用在手提電腦運行WiFitester3.0通信測試軟件。在空曠場地,在0 dBm發射功率下,測試本系統采用的MW151RM無線WiFi發射模塊在不同通信距離下接收信號強度(Received Signal Strength Indication,RSSI)和丟包率之間的關系,實驗結果如圖7所示。機器人距離用戶端60 m內接受信號強度[20]高于-90 dBm,丟包率小于10%,滿足通信監測要求。

圖7 信號強度及丟包率與通信距離關系圖
4.2.2 系統反應時間
在空曠場地,在0 dBm發射功率下,測試本系統采用的MW151RM無線WiFi發射模塊在不同通信距離下感知機器人接收到移動端控制信號的反應時間,實驗結果如圖8。
5 結論

圖8 在不同距離下感知機器人反應時間
文中以多參數感知機器人為研究平臺,基于云技術的系統架構和用戶關鍵信息多傳感器數據采集方法,設計了針對多參數感知機器人基于云技術的系統架構,以減少機器人計算壓力、網絡通信負載,對多參數感知機器人的設計進行了深入研究,利用嵌入式技術進行系統軟硬件的實現,通過實際測試機器人尋跡定位導航、環境感知預警、數據云存儲、無線通信控制等功能,驗證本設計實現了預期目標。無線通信性能測試實驗數據表明,感知機器人無線通信距離60 m內具有良好的通信質量和響應速度。
然而,由于研究時間與掌握知識的局限性,本人認為本文的研究內容還有幾個方面還需要解決:
1)由于本系統云架構中云服務器選擇的局限性,系統實現了機器人感知數據流的存儲,尚未達到數據云端計算、數據有效融合的功能。因此,云服務器功能需要進一步改進。
2)由于硬件系統采用模塊化設計思想,在進行系統集成時模塊之間難免存在兼容性的問題,各傳感器模塊還受到模塊電信號的影響,如何更好的進行硬件系統集成減少模塊間信號的干擾也是一個值得關注的問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32