波爾共振實驗中相位差測量的改進
2018-12-22 07:19:52馬明哲趙俊浩鄧揚揚王愛芳
物理實驗 2018年12期
馬明哲,劉 芬,趙俊浩,鄧揚揚,王愛芳
(山東大學(威海) 空間科學與物理學院,山東 威海 264209)
振動是物質世界中廣泛存在的物理現象.受迫振動是在周期性驅動力作用下所引起的振動,當驅動力頻率與物體固有頻率接近,受迫振動的振幅最大,稱為共振.共振現象大量存在于科學研究、生活生產和自然活動中,如利用核磁共振和順磁共振研究物質的結構等[1].
1 實驗原理
1.1 共振現象基本量之間的關系
物體做自由振動時,其位移隨時間按正弦規律變化,稱為簡諧振動.簡諧振動的振幅及初相位與振動的初始條件有關,振動的周期或頻率與初始條件無關,而與系統的固有特性有關,稱為固有頻率或者固有周期.當從外界給物體加上周期性外力(稱為策動力)時,如果策動力的頻率與該物體的固有頻率相同,物體振動的振幅達到最大,這種現象叫做共振[2].
ZKY-BG波爾共振實驗儀(如圖1所示),在彈性力矩和電磁阻尼力矩作用下,擺輪分別作自由擺動和受迫振動,以此來研究受迫振動特性.
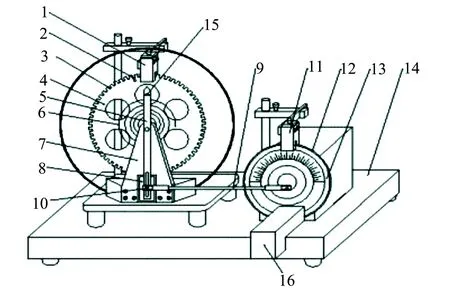
1.光電門1 2.長凹槽 3.短凹槽 4.銅質擺輪 5.擺桿 6.蝸卷彈簧 7.支撐架 8.阻尼線圈 9.連桿 10.搖桿調節螺絲 11.光電門2 12.角度盤 13.有機玻璃轉盤 14.底座 15.彈簧夾持螺釘 16.閃光燈
當擺輪受到周期性外力矩M=M0·cos (ωt)的作用,并在有空氣阻尼和電磁阻尼的媒質中運動時,其運動方程為
(1)
則式(1)變為
(2)
當mcos (ωt)=0時,式(2)即為阻尼振動方程.當β=0,即在無阻尼情況時,式(2)變為簡諧振動方程,系統的固有頻率為ω0.方程(2)的通解為
θ=θ1e-β tcos (ω0t+α)+θ2cos (ωt+φ0),
(3)
由式(3)可見,受迫振動可分成2部分:第一項,θ1e-β tcos (ω0t+α)和初始條件有關,經過一定時間后衰減消失.第二項,說明外力矩對擺輪作功,向振動體傳送能量,最后達到穩定的振動狀態,振幅為
(4)
它與外力矩之間的相位差的正切值為
(5)
由式(4)和式(5)可以看出,振幅θ2與相位差φ的數值取決于外力矩m、頻率ω、系統的固有頻率ω0和阻尼系數β,而與振動初始狀態無關.

(6)
(7)
式(6)~(7)表明,阻尼系數β越小,共振時圓頻率越接近于系統固有頻率,振幅θr也越大,如圖2幅頻特性所示.從圖2中還可以發現阻尼不同,共振時的共振頻率并不相同,只有在自由振動時其共振頻率才等于固有頻率.
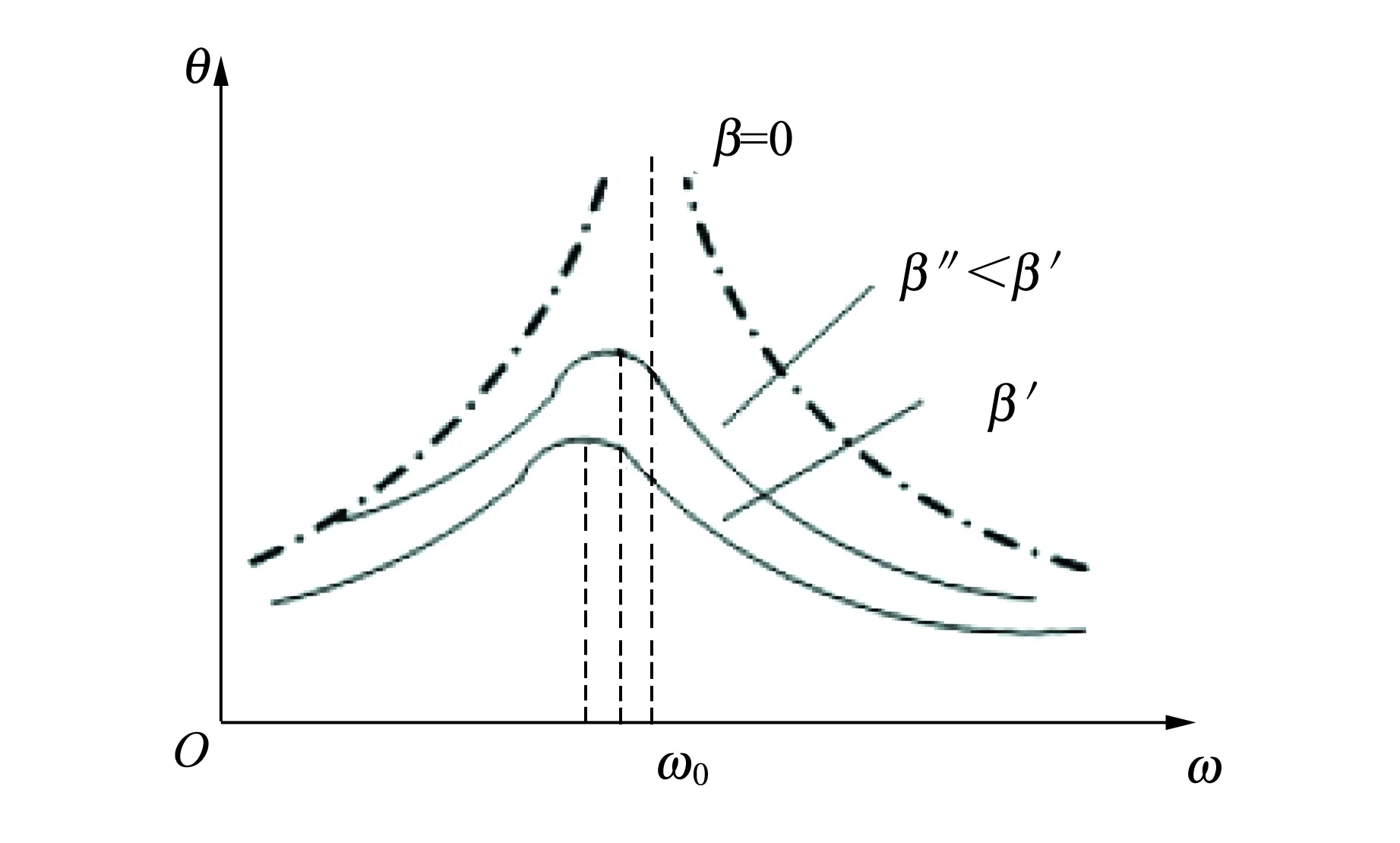
圖2 幅頻特性
為了更方便直觀地觀察不同阻尼受迫振動的幅頻特性、相頻特性,橫坐標用ω/ωr表示,則不同阻尼的共振點都在ω/ωr=1處,即圖3,圖4表示在不同β時,受迫振動的幅頻特性、相頻特性.相頻特性指的是擺輪振動的相位和策動力的相位之差與其振動頻率的關系[3].
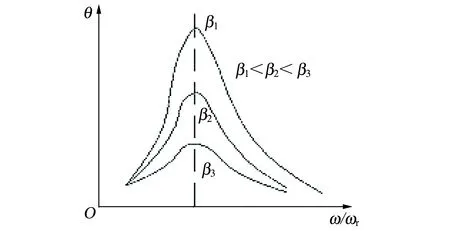
圖3 幅頻特性

圖4 相頻特性
1.2 儀器原理
ZKY-BG型波爾共振儀由與蝸卷彈簧相連的擺輪和與電機相連的有機玻璃轉盤組成,其中擺輪為本次實驗的主體和測量對象.電器控制箱能控制電機頻率,記錄擺輪振幅、頻率、電機的頻率,并可以通過擺輪下方的電磁鐵改變對擺輪的磁阻尼.圖1中光電門1測量擺輪的周期和振幅,光電門2測有機玻璃轉盤的周期.
2 問題與分析
多次實驗和分析發現實驗存在以下問題:
2.1 讀數誤差大
相位差的測量是1號光電門在擺輪零相位時觸發閃光燈閃光,依賴閃光后產生的短暫視覺滯留觀察有機玻璃轉盤的上熒光線對應的相位φ,可得策動力與擺輪振幅的相位差為φ[4].讀數需要實驗者在不足1 s的滯留時間內完成讀數,且滯留現象不明顯,不易于捕捉,難以準確讀出數值.標志線的視覺滯留,對實驗室的光環境有較高要求,若周圍環境光照強度太大,則有機玻璃盤上的亮線被掩蓋,不易觀察到;若環境光強太弱,則無法看清玻璃轉盤后的角度盤的數據和刻度;且閃光燈發出的強光可能對實驗者產生較大刺激.綜合以上多種因素產生的誤差大于刻度盤的最小分度[5].
2.2 實驗操作不便捷、實驗過程不舒適
本實驗需要實驗者長期暴露在不斷閃爍的強光源下進行,由于視覺滯留不明顯,在正常讀數前還要判斷系統是否穩定,為了盡量準確地讀出示數,每次相位差讀數,需要閃光燈閃爍10次左右.實驗室內多組操作,相互間光相互影響.這樣光環境的實驗操作和冗長的實驗過程,不單對實驗者的身心造成傷害,另外也會因為長期視覺疲勞而降低讀數的準確性.
3 儀器改進方案與實施
用光電門測量相位差.舍棄頻閃法,改進的實驗儀器將閃光燈去除,加入光電門,借助光電門的特性來測量相位差,用單片機實現數據的讀取和處理[6].

圖5 自制的邊緣帶小齒的轉盤

圖6 改進后的儀器

圖7 單片機控制中心

圖8 算法流程圖
4 儀器制作
在實踐的過程中,分為3個任務模塊,齒輪的定制、光電門的讀數與程序設計、原閃光燈信號的轉換與接入,并逐一實現完成.
為吻合原有儀器設計的需要,設計內徑為5.0 cm、外徑為9.0 cm、厚度為0.2 cm、可用螺絲安裝固定的120齒的齒圈.使用AutoCAD或Solidworks軟件繪制工圖,通過采用3D打印技術,使用有機高分子材料制作.設計圖如圖5所示,成品如圖6中右側米色的齒狀轉盤.
采用MCU C語言進行程序的編寫.基礎程序為:每接收到1次信號(即光電門處經過1個齒),將數據累加3°(依據齒輪規格確定,暫定120齒),當達到357°時返回預設值0°,并開始下組循環.微小振動造成的計數誤差,采用延遲函數進行消除.硬件方面,使用單片機、液晶顯示屏等,并進行簡單的電路設計.將光電門作為傳感器,安裝于合適位置,將儀器調整至初始位置后,即可按照操作流程進行實驗,并從顯示屏上讀取示數[8].
去除原儀器上的閃光燈后,在信號的傳輸上,并無較大變動.即將原電信號進行變壓(所采用51單片機的額定輸入高電平為5 V;經萬用表粗測,原儀器所采用GZ光電傳感器輸出信號約為11 V),仍以電信號的形式輸入新的電路,使得顯示屏可以在讀數的時間點上顯示并記錄有關數據.
5 結束語
針對現有波爾共振儀存在的不足設計了數據采集系統,通過增加齒輪型的有機玻璃轉盤,結合光電門即可替代原有實驗者通過肉眼記錄數據,所增加的實驗數據顯示屏也方便實驗者記錄數據,提高了實驗效率,同時消除了頻閃法對其他實驗小組的影響,改善了實驗環境.通過本次對波爾共振儀的改進,有助于學生更直觀且更準確地觀察和理解共振現象.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55