高速公路清掃車刷盤建模與參數分析
2018-12-24 02:24:46程晨
裝備制造技術 2018年10期
程 晨
(長安大學 工程機械學院,陜西 西安710064)
現有道路垃圾清掃設備大都針對城市道路工況和交通條件設計,個別廠家針對普通公路設計生產了專用清掃車,均不適應高速公路的斷面形式、位置環境和快速交通的要求,導致高速公路垃圾清理主要靠人工完成,工作效率低,成本高,生產安全問題突出[1]。由于我國經濟社會發展所處的階段性特點,惡劣天氣吹撒、散裝超載貨物拋撒、人為丟棄等因素產生的公路垃圾在很多路段相當嚴重,清掃養護任務繁重,亟需通過技術研究,針對高速公路及垃圾產生的特點開發專用的、快速的、高效的、安全的垃圾清掃裝備[2]。
基于此,筆者已廣泛以傳統道路清掃車的掃盤的工作原理,對掃盤進行建模,對清掃車掃盤進行傾運動及接地點速度的理論分析計算找出滿足清掃車以高速公路最低限速30 km/h行駛,盤刷轉速的參數范圍[3]。
1 高速清掃車的行車速度,盤刷旋轉速度與盤刷接地點的理論關系
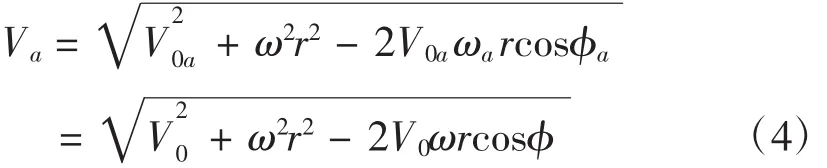
清掃車掃盤接地點絕對速度v與車輛的行駛速度v0,盤刷的旋轉速度的關系為:
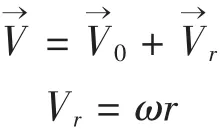
圖1為左側盤刷接地點速度矢量圖。
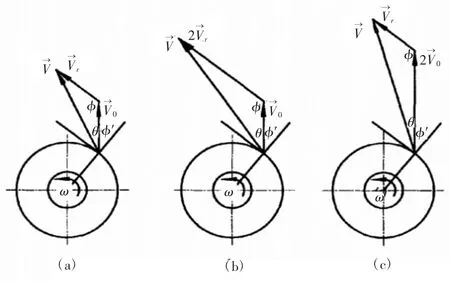
圖1 左側盤刷接地點的速度矢量圖
由圖1可知:
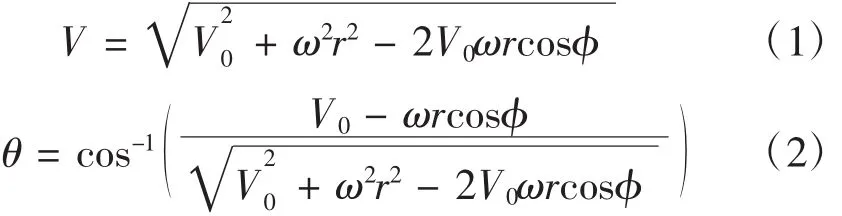
式中:V為轉盤接地點相對于地面的絕對速度,km/h;V0為清掃車的行駛速度,km/h;ω為盤刷的旋轉速度,r/min;r為轉盤的半徑,km;φ為清掃車前進方向與接地點線速度方向的夾角,rad.有:

式中,φ′為盤刷接地點中心線與清掃車前進方向的夾角,rad;θ為刷盤接地點的絕對速度與清掃車前進速度的夾角,rad.
在圖 1(a)中,
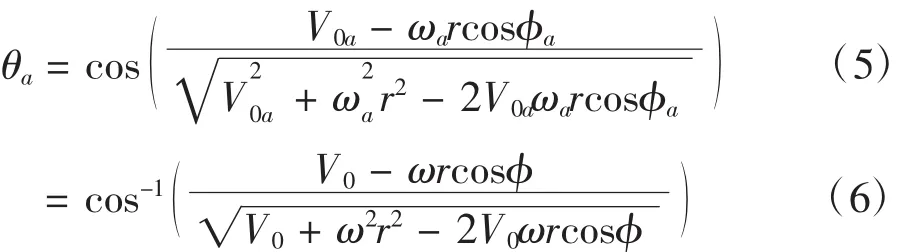
在圖 1(b)中,
因為 0 < φ′< 90,cosφ′< 1
由圖 1(a)和圖 1(b)及式(11)、(12)可推出 Vb> Va,θb> θa,從而可以得出以下結論:
(1)當維持掃地車的行駛速度v0不變,當盤刷的電機的旋轉速度ω上升時,盤刷與地面接觸的絕對速度速度V將會增加,并且絕對速度的方向也會有所變化,同時絕對速度的內夾角θ也會變大,其中絕對速度的方向和內傾夾角θ的方向變化同向。
(2)維持盤刷的電機的旋轉速度ω不變,當改變行駛速度v0時,盤刷刷盤接地點的絕對速度無論是方向還是大小都將變化。
(3)維持掃地車的行駛速度v0不變,同時也維持盤刷的電機旋轉速度ω不變,盤刷接地點的絕對速度無論是方向還是大小都將變化。
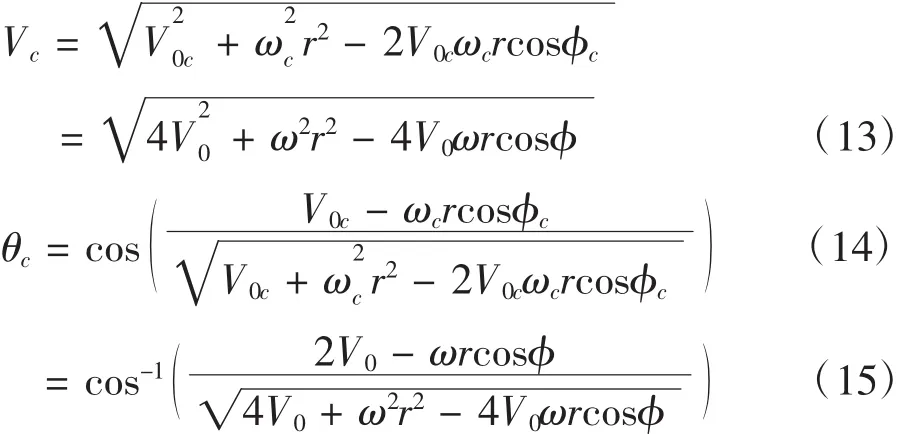
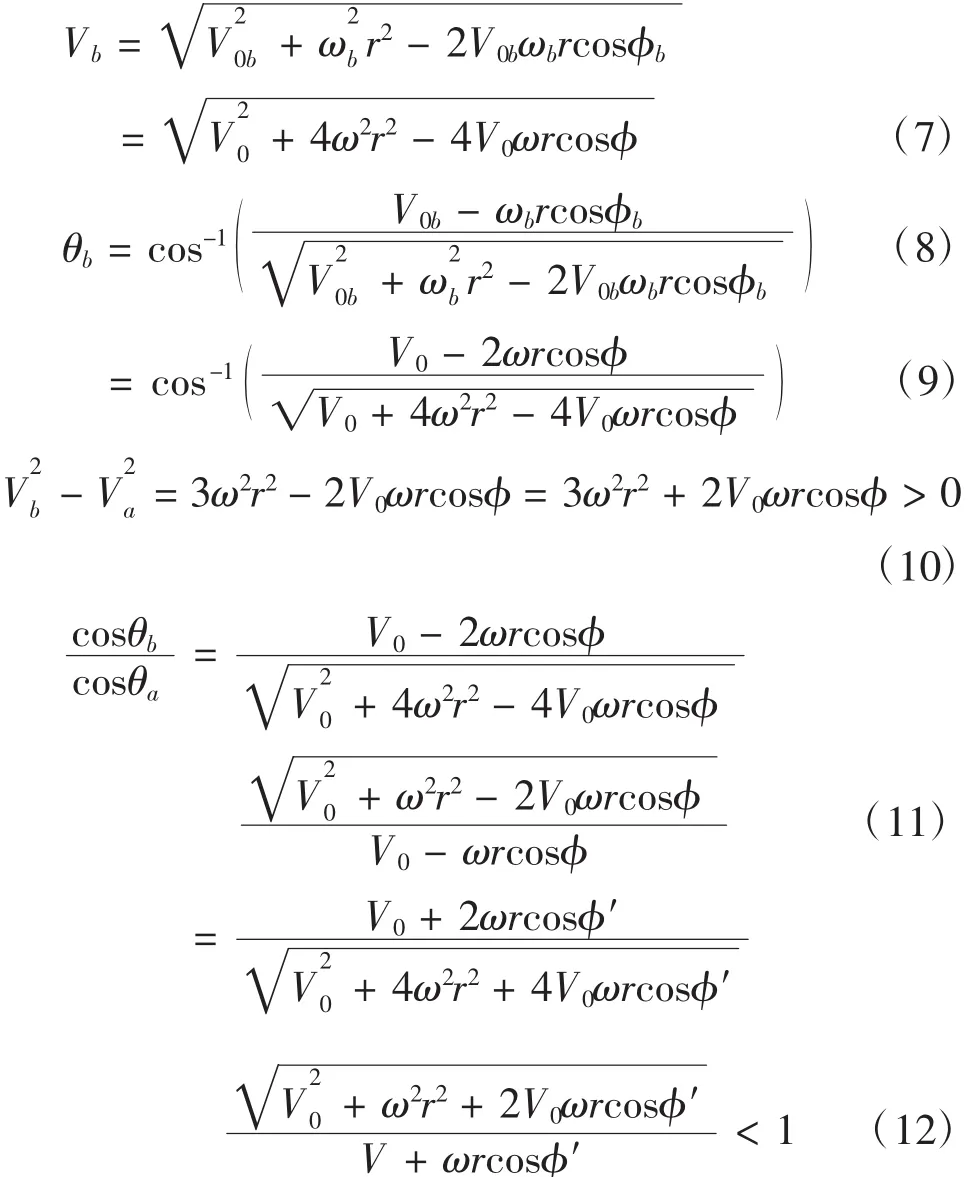
由圖 1(a)和圖 1(c)及式(17)、(18)Vc> Va,θc> θa,從而得出結論:
當車輛的行駛速度v不變時,盤刷的旋轉速度ω增加時,盤刷與地面的接觸點的絕對速度將會增大,而且接觸點的絕對速度的方向也會有所增加,同時絕對速度與車輛行駛速度的夾角θ將會變小,其中絕對速度的方向和絕度與車輛行駛速度的夾角θ方向變化反向[4]。
通過計算可知,為了使清掃速度,清掃效率滿足清掃車在高速公路的以最低時速30 km/h,應當找到盤刷的旋轉速度以及清掃車行進速度隊清掃效率的影響關系。
2 高速公路清掃車掃盤建模及其運動軌跡仿真
2.1 清掃車掃盤結構設計
盤刷由刷盤底板、圍板、掃把頭插槽、盤刷蓋板組成。通過研讀大量相關文獻以及各大清掃車生產廠家的網頁,確定掃把頭插槽,刷盤材料為45#鋼,毛刷材料為合成塑料。
2.2 單側清掃結構建模
(1)打開Solid Works軟件,新建零件,如圖2所示。
(2)通過新建裝配體命令進入Solid Works裝配模塊,按零件的主次關系完成清掃機構的裝配如圖3所示。
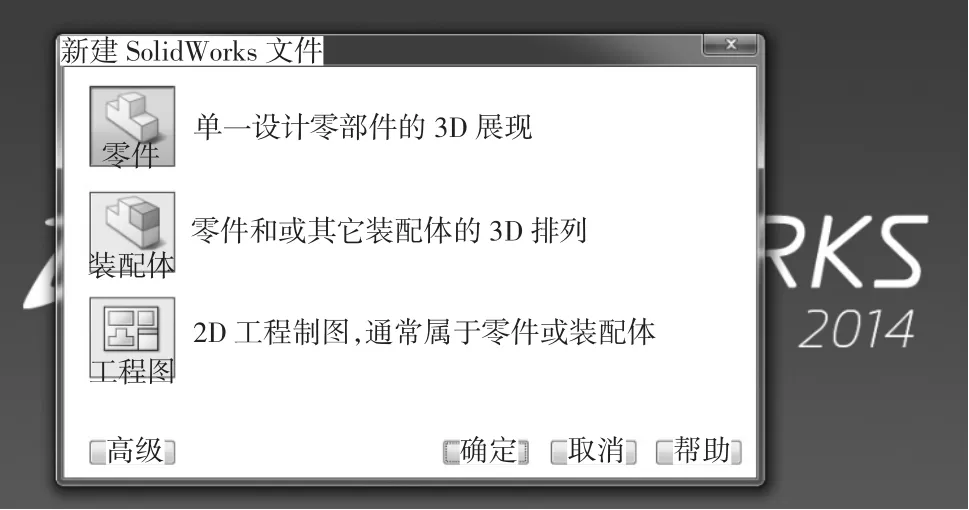
圖2 Solid Works新建零件
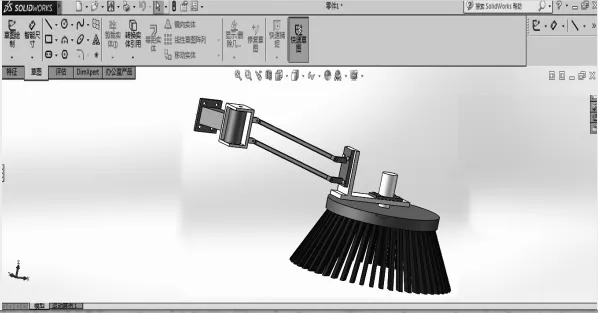
圖3 清掃機構裝配圖
2.3 清掃車掃盤清掃時的運動仿真
在清掃車清掃工作時,連接件與傾角調整機構處于靜止狀態,在對清掃車清掃機構仿真時,對仿真對象做了一些調整,省掉連接機構及傾角調整機構等盤刷的控制機構,只對盤刷進行清掃運動,直接給盤刷添加旋轉馬達和直線馬達來進行運動仿真[5]。
盤刷運動仿真時前視平面代表地面,盤刷與前視平面的接觸點的運動軌跡來模擬盤刷運動時接地點的運動軌跡[6]。如圖4所示。通過設置不同的盤刷行車速度和旋轉速度,設置界面如圖5所示。

圖4 接地點的運動軌跡
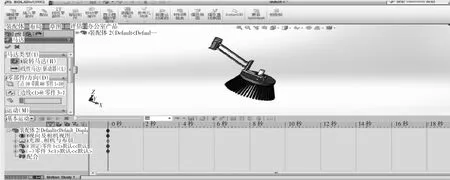
圖5 仿真界面設計
圖6 ~圖11所示為通過設置不同的旋轉馬達轉速和線性馬達轉速模仿盤刷的旋轉速度和車輛的行駛速度,觀察相鄰軌跡間的間距,從理論上獲得能使盤刷清掃效率較高的參數取值,找出實際盤刷旋轉速度與車輛行車速度的兩參數取值范圍。

圖6 行車速度30km/h盤刷速度700r/min
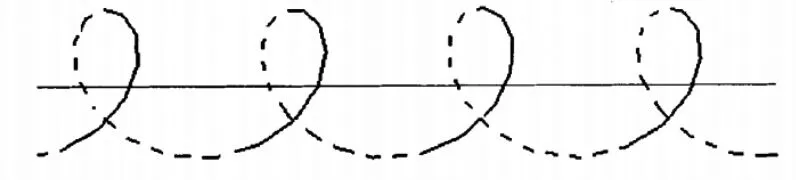
圖7 行車速度30km/h盤刷速度800r/min
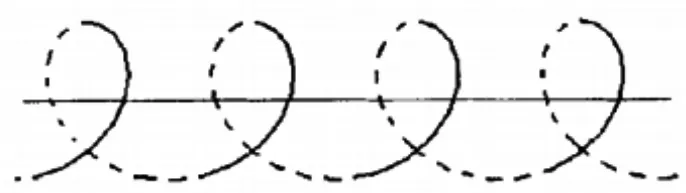
圖8 行車速度30km/h盤刷速度800r/min
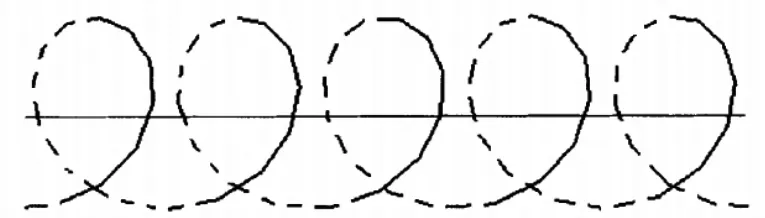
圖9 行車速度30km/h盤刷速度1000r/min
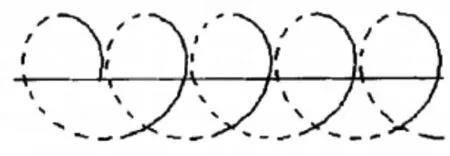
圖10 行車速度30km/h盤刷速度1100r/min
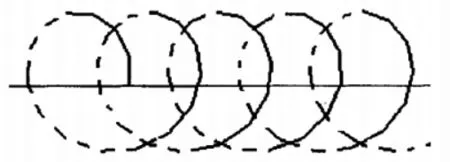
圖11 行車速度30km/h盤刷速度1400r/min
3 結束語
以上各種參數仿真,在滿足高速公路的行車最低速度30 km/h的前提上對盤刷的轉速進行一些列仿真,通過對比盤刷接地點的軌跡圖不難發現,在盤刷轉速為1 400 r/min的情況下,盤刷接地點運動軌跡的擺帶的相隔距離最近,相應的清掃效率最好;而盤刷轉速1 100 r/min的情況下接地點的運功軌跡雖然比盤刷轉速1 400 r/min的運動軌跡的擺帶要寬,但整體也滿足清掃要求;當然從軌跡圖上也可以看出,當盤刷轉速低于1 100 r/min時,盤刷接地點運動軌跡的擺帶間的相隔距離都很大,道路的清掃效率很差,從而可以得出結論當行車速度30 km/h時,盤刷的旋轉速度的取值為1 100~1 400 r/min.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
建材發展導向(2021年20期)2021-11-20 05:43:18
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
小說月刊(2014年4期)2014-04-23 08:52:20