南極羅斯海高分辨率數字水深模型
2018-12-25 11:03:46徐澤高金耀楊春國沈中延
極地研究 2018年4期
徐澤 高金耀 楊春國 沈中延
(1國家海洋局海底科學重點實驗室, 浙江 杭州 310012;2國家海洋局第二海洋研究所, 浙江 杭州 310012)
提要 數字水深模型是描繪海底地形地貌的水深地形圖, 在羅斯海陸架上, 冰蓋的進退形成形態大小各異的海底冰川地貌, 而對海底冰川地貌的解釋研究需要高分辨率數字水深模型的支持。采用36個國際公開航次采集到的多波束水深數據以及GEBCO_2014網格水深數據, 融合、編繪成50 m網格間距的高分辨率羅斯海數字水深模型。由于采用的多波束水深數據來源于不同調查船只、不同多波束聲吶系統及不同航次, 這給多波束水深數據的精度評估、融合等帶來一定的困難。本文首先采用通用繪圖工具(GMT)對多波束中央波束水深數據的交點誤差做統計分析, 再利用統計分析結果對不同航次水深數據做出精度評估,最后利用“移除-恢復”法對兩種來源及精度不同的水深數據做最后的融合。通過以上步驟得到的羅斯海高分辨率數字水深模型與國際南大洋水深地形圖(IBCSO)相比, 能夠更加清晰地凸顯海底微地形地貌特征,尤其是冰川進退過程中產生的地貌特征, 可滿足羅斯海海底冰川地貌的解釋工作及綜合地質地球物理研究任務。
0 引言
南極冰蓋覆蓋面積達13.6×106km2,體積約占全球總冰量的90%, 如果冰蓋全部融化, 將導致全球海平面上升約66 m[1]。南極冰蓋被橫貫南極山脈分為東南極冰蓋和西南極冰蓋, 其中西南極冰蓋為海洋型冰蓋, 冰蓋接地線大部分位于平均海平面以下, 受海洋環境因素影響較大, 對氣候變化非常敏感。羅斯海作為西南極冰蓋向海延伸的一個主要區域, 在地質歷史上受氣候變化的影響, 冰蓋活動較為顯著, 冰蓋的進退在海底形成各種不同形態、尺度的冰川地貌, 這些海底冰川地貌對于理解歷史上南極冰蓋的進退過程具有重要的指示意義。“十二五”期間, 依托“南北極環境綜合考察與評估”專項, 我國在羅斯海區域進行了多年的地質地球物理考察, 旨在探究地質歷史中西南極冰蓋在羅斯海的活動動態及與全球氣候變化的關系, 然而, 這些地質地球物理資料的合理解釋離不開高分辨率海底地形數據的支持。
目前, 羅斯海區域還沒有公開的高分辨率水深地形圖。國際上已公開的多個全球或半球區域的水深地形圖, 分辨率都較低。Arndt等[2]于2013年發布了第一版國際南大洋水深地形圖(IBCSO Version 1.0), 采用了來自15個國家30個機構的水深數據, 范圍在60°S以南, 其中包括多波束水深數據、單波束水深數據、數字化海圖的水深數據等, 其網格間距為500 m×500 m。Weatherall等[3]于2014年發布最新一版全球海底地形圖(GEBCO_2014),利用 IBCAO Version 3.0、IBCSO Version 1.0等最新數據對GEBCO_08進行了更新, 網格間距為30弧秒。Becker等[4]于2009年發布了分辨率為 30弧秒的全球水深和高程數據(SRTM30_PLUS)。IBCSO、GEBCO_2014和 SRTM30_PLUS提供的南大洋或全球的水深地形圖, 包含了羅斯海區域水深地形圖。但是, 以上 3個水深數據產品提供的羅斯海區域水深地形圖分辨率較低, 最高的分辨率為 500 m, 難以滿足羅斯海陸架地區海底冰川地貌和歷史上冰川活動等的解釋研究工作要求。
為了得到羅斯海區域高分辨率的水深地形圖,滿足羅斯海海底冰川地貌的解釋工作及綜合地質地球物理研究任務, 本文采用36個公開航次多波束水深數據和GEBCO_2014網格數據, 利用多波束的中央波束水深數據對水深數據質量進行精度評估[5], 采用移除-恢復法[6-7]對不同來源和分辨率的水深數據進行融合。最終得到羅斯海高分辨率的數字水深模型, 其網格間距為50 m, 能夠清晰地凸顯海底冰川地貌特征, 這些冰川地貌是歷史上羅斯海冰川進退的有力證據。
1 數據與方法
1.1 數據來源
本文采用36個公開航次的羅斯海多波束水深數據(表1), 范圍為160°E—150°W, 71°S—79°S。其中10個航次的水深數據來自于美國國家地球物理數據中心(The National Geophysical Data Center,NGDC), 其余26個航次的數據來源于海洋地球科學數據系統(Marine Geoscience Data System,MGDS)。由于采用不同的調查船和多波束測深儀(Nathaniel B.Palmer調查船航次30個, 多波束聲納系統型號有SeaBeam 2112和Kongsberg EM120;Healy調查船航次1個, 多波束聲納系統型號為SeaBeam2112; Oden調查船航次1個, 多波束聲納系統型號為 Kongsberg EM122), 且采集時間跨度大(1994—2013年), 因此導致不同航次的水深數據質量參差不齊。
羅斯海多波束水深數據空間分布不均勻, 主要分布在羅斯海西部(圖1), 且仍有許多區域沒有多波束水深數據。在羅斯海高分辨率數字水深模型制作過程中, 對于沒有多波束水深數據的區域, 本文利用分辨率為 30弧秒的 GEBCO_2014網格水深數據填充。
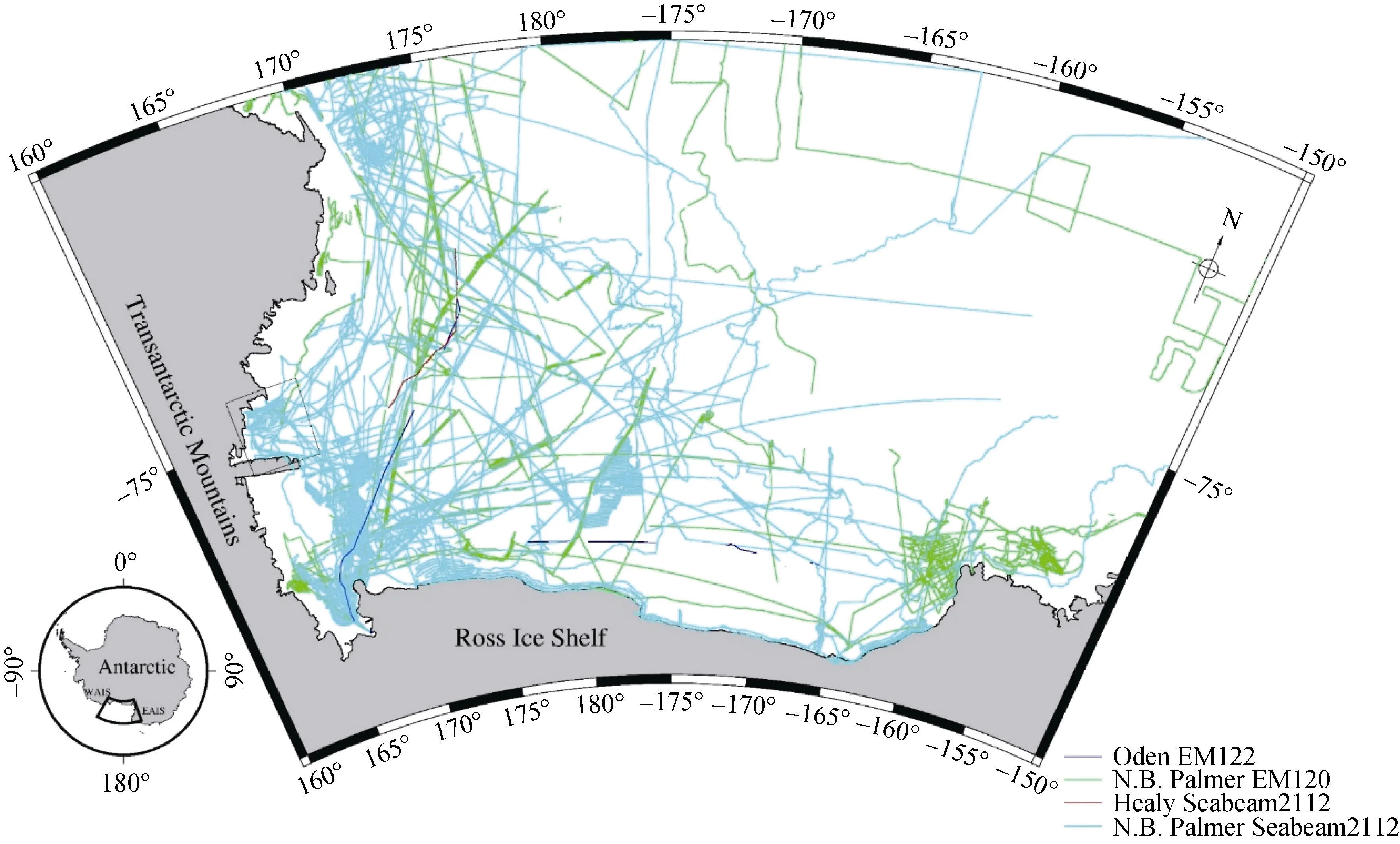
圖1 羅斯海不同調查船和多波束聲納系統航跡分布圖Fig.1.Tracks of different vessels and multi-beam systems
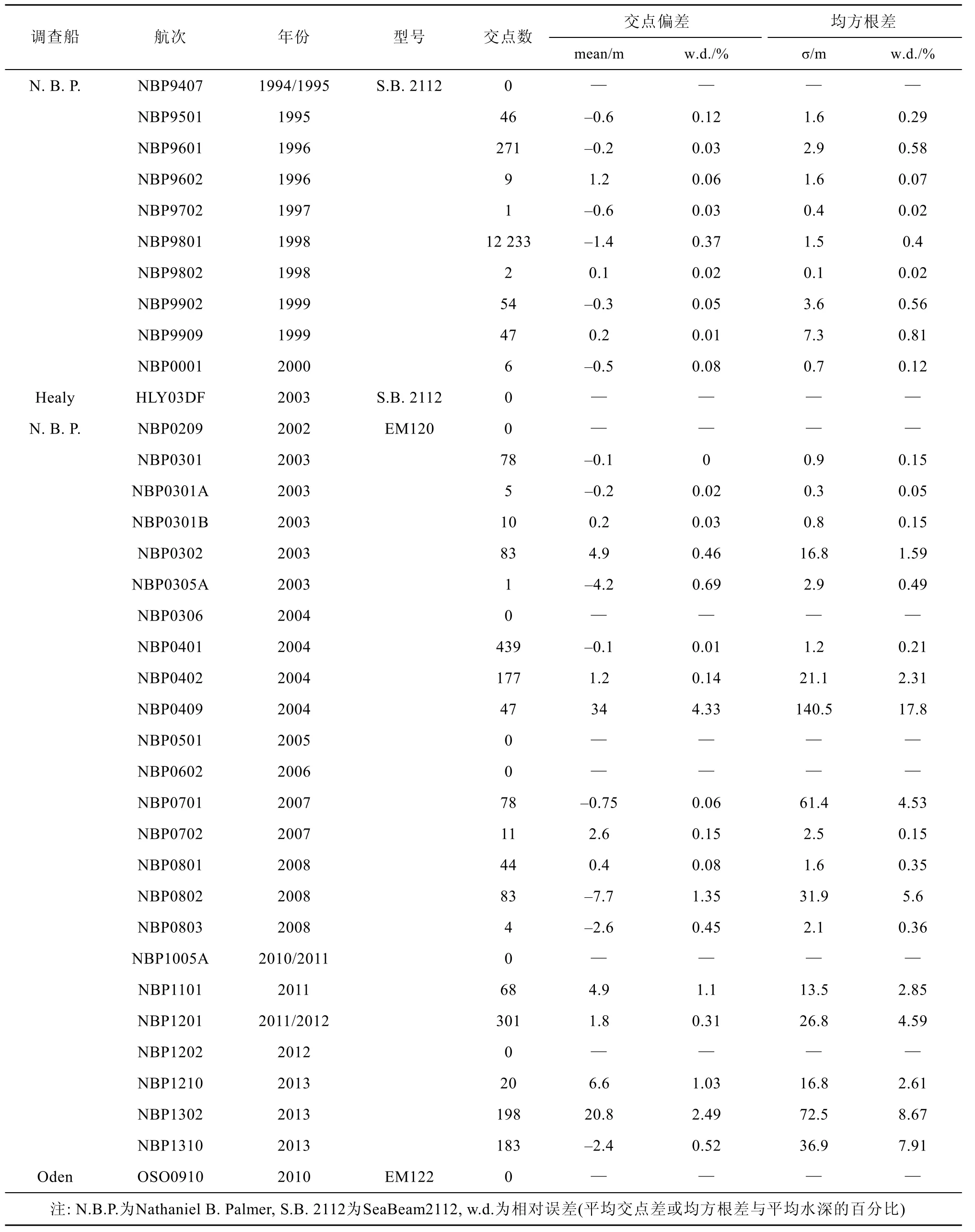
表1 多波束水深數據來源以及單獨航次交點差統計分析結果Table 1.Multi-beam source data and crossover statistics for individual cruise
1.2 數據預處理
多波束聲納系統在數據采集過程中, 由于各種誤差的影響, 導致出現水深異常點, 在成圖之前需要剔除這些水深異常點。首先利用MBsystem軟件[8]對每個航次數據進行處理, 自動刪除水深異常點,然后提取處理后的數據, 并保存為 ASCII XYZ數據格式。接著利用QPS Fledermaus軟件對XYZ數據進行可視化成圖, 檢查成圖結果, 再次識別水深異常點, 利用Fledermaus軟件中的3D Editor模塊手動刪除水深異常點, 接著導出處理后的數據。重復上一步驟, 直至完全刪除水深異常點, 將處理后的水深數據保存為ASCII XYZ數據格式(圖2)。
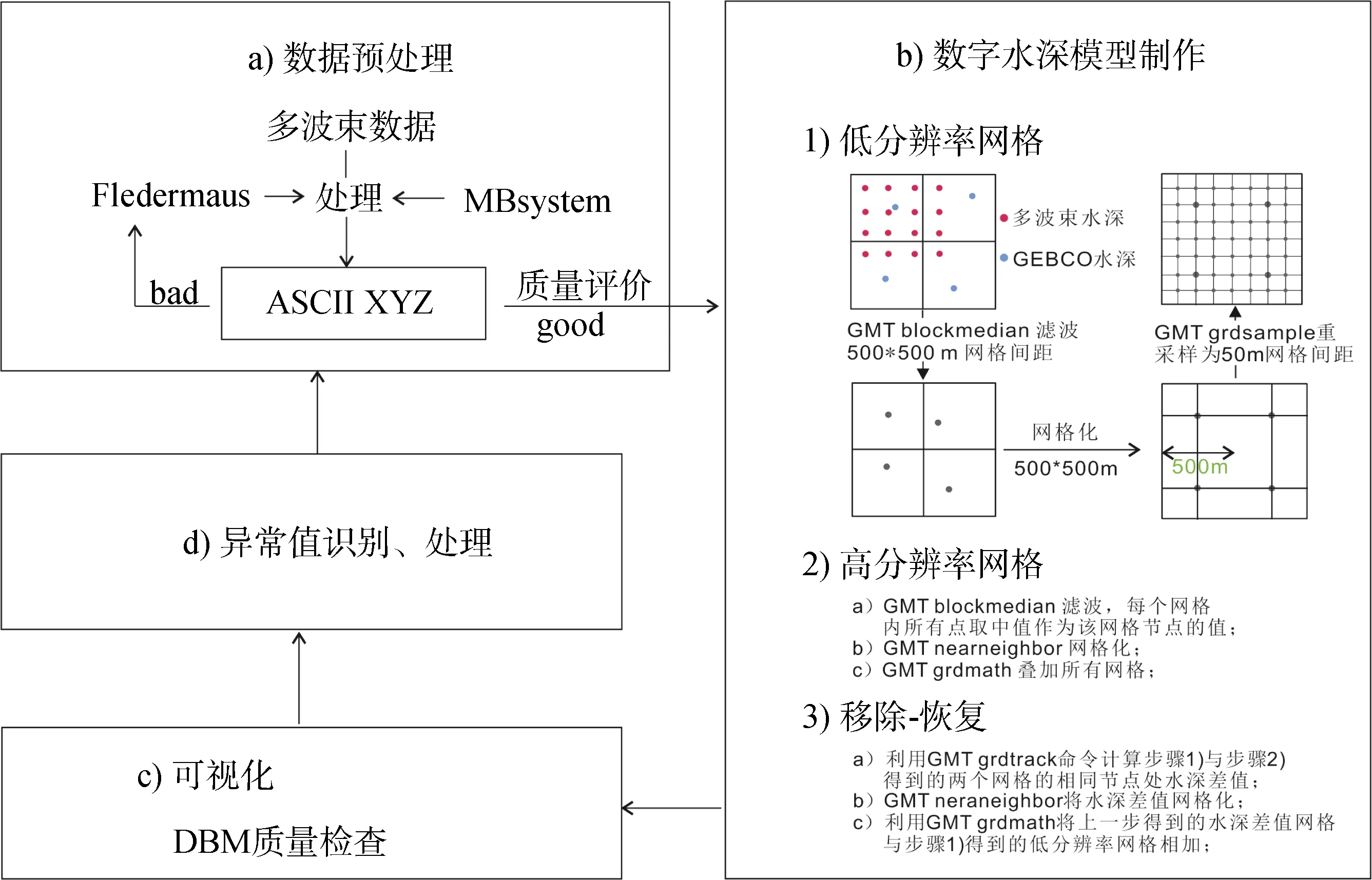
圖2 數據預處理與羅斯海數字水深模型制作流程Fig.2.Scheme showing data pre-processing and gridding steps to produce the digital bathymetry model of Ross Sea
1.3 數據精度評價
多波束水深數據的誤差主要來源于聲速剖面、橫搖、縱搖和艏搖等。其中聲速剖面對中央波束水深影響最小, 對邊緣波束水深影響最大[9]。對于多波束水深數據, 通常采用主測線和檢查測線的交點處水深不符值(交點差)來評價其質量。GMT中的x2sys工具包已被應用于許多船測航跡數據(重力、磁力等數據)的質量評價[10]。由于x2sys工具只能應用于航跡數據, 而多波束系統在沿測線航行過程中, 采集到的數據為條帶數據,在垂直于航跡方向, 條帶的寬度與扇區開角和水深等有關[11]。因此, 對于處理后的多波束水深數據, 為了能夠應用 x2sys工具包進行數據精度評價, 本文首先使用 MBSystem軟件抽取多波束每3個相鄰ping的中央波束水深并取平均值, 然后利用GMT軟件中的x2sys工具包對交點處水深不符值做精度評估。利用每3個ping的中央波束水深平均值可以減小偶然誤差對交點差分析的影響,同時也能減小數據處理的時間。
x2sys工具包為GMT的一系列命令集合, 可以計算交點的位置和交點差的平均值及標準差。若交點處沒有水深觀測值, 則利用最近點水深觀測值進行線性插值。當船速較小或調查船在小范圍內來回航行時, 會導致 x2sys工具算出大量的重復交點。因此在計算交點的時候, 把船速限制在 2節以上, 以避免大量重復交點的出現影響到結果。為了確定每個航次數據的可靠性, 對每一個航次數據進行統計分析, 計算每個航次內部所有交點差的平均值、均方根差以及相對誤差(表1)。對于相同調查船和多波束聲納系統型號的航次,認為其數據質量基本一致, 并將相同調查船和多波束聲納系統型號的航次分為一組, 分別計算每組所有航次的內部交點差和外部交點差的平均值、均方根差以及相對誤差(表2)。

表2 根據相同調查船與多波束聲納系統型號的分組統計分析結果Table 2.Crossover statistics grouped by similar vessel, sonar system aboard
1.4 數據融合
由于羅斯海多波束水深數據覆蓋較少, 仍有很多區域沒有實現多波束水深數據的覆蓋。對于這些區域, 在數據融合過程中, 使用 GEBCO_2014水深網格數據對其填充。因此, 羅斯海數字水深模型將由兩種不同類型數據融合而成, 一種是高分辨率的多波束水深數據, 另一種是低分辨率的 GEBCO_2014網格水深數據。采用移除-恢復法(圖2)對兩種不同類型的數據進行融合, 使用該方法, 在多波束水深覆蓋到的區域可以保留其高分辨率的特性, 而其他區域則可以被低分辨率水深數據覆蓋, 保證水深數據的全覆蓋[12]。
1.多波束水深數據網格化
將采用相同調查船和多波束聲吶系統型號的航次分為一組, 共分4組(表2)。首先, 利用GMT軟件中“nearneighbor”命令[13]分別對4組多波束水深數據網格化, 得到 4個網格文件, 網格分辨率為50 m。使用該網格化命令, 可以使高分辨的水深數據限制在多波束數據覆蓋到的區域, 而網格的其他區域則沒有數據。
由于4個網格文件來源于4組數據質量不同的航次, 在 4個網格文件合并過程中, 對于不同網格文件之間的相互重疊覆蓋區, 優先選取數據質量高的網格文件, 舍棄數據質量低的網格文件。均方根差和相對誤差真實反映了測量數據的質量高低, 均方根差和相對誤差的值越小, 代表測量數據質量越好[14]。為了便于下一步使用GMT軟件對 4個不同數據質量的網格文件進行合并,本文用權重代表測量數據質量的高低, 權重為 4代表數據質量最優(均方根差和相對誤差最小),權重為 1代表數據質量最差(均方根差和相對誤差最大)。根據每組水深數據的均方根差和相對誤差的大小(表 2, 圖3), 將第一組 Nathaniel B.Palmer調查船SeaBeam2112多波束10個航次水深數據得到的網格文件分配權重為4(該組數據均方根差和相對誤差最小, 數據質量最優), 將第二組Nathaniel B.Palmer調查船EM120多波束24個航次水深數據得到的網格文件分配權重為3(該組數據均方根差和相對誤差較小, 質量次之)。第三組Healy調查船SeaBeam2112多波束和第四組Oden調查船 Em122多波束各自只有一個航次的水深數據, 沒有交點, 無法計算均方根差和相對誤差, 在沒有均方根差和相對誤差的前提下, 以數據采集的年代遠近為依據, 認為采集年代較近的測量數據的質量優于采集年代較遠的測量數據的質量, 基于此, 對第三組 Healy調查船水深數據網格化得到的網格文件分配權重為 1(2003年采集), 對第四組 Oden調查船水深數據網格化得到的網格文件分配權重為2(2010年采集)。
使用 GMT軟件中修改后的“grdmath”命令中的XOR操作符將4個網格文件合并。首先將權重為1和2的網格疊加, 如果對于某一網格節點權重為1和2的網格都不存在水深值, 則疊加后的網格該節點處水深取空值, 如果權重為 2的網格在該節點存在水深值則取該水深值, 否則, 取權重為 1的網格在該節點的水深值。將得到的網格與權重為3的網格疊加, 隨后再與權重為4的網格疊加。使用該方法, 在每次疊加過程中可使得數據質量高(權重大)的網格得以保留。最后, 得到一個 50 m分辨率的多波束水深網格文件(圖4)。
2.全部水深數據網格化
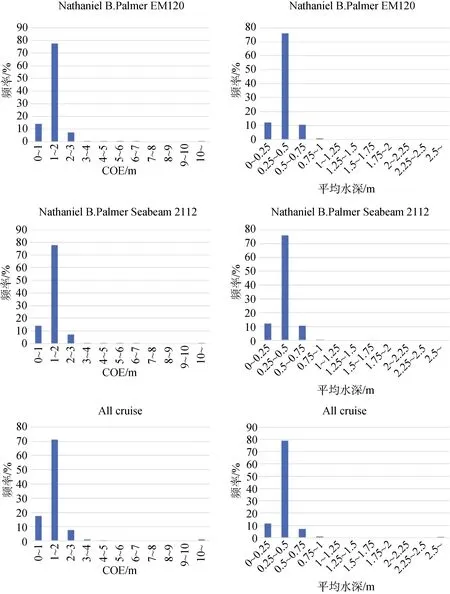
圖3 根據相同調查船與多波束聲納系統型號, 將所有航次分組, 并對每組統計分析交點差Fig.3.Crossover-error(COE) statistics grouped by same vessel and sonar system
其次, 利用 GMT軟件對全部羅斯海多波束水深數據和GEBCO_2014水深數據網格化, 其中網格分辨率為500 m×500 m。然后對得到的網格文件重新采樣, 重新采樣后的網格文件分辨率為50 m×50 m, 得到一個低分辨率的水深網格文件。
3.兩種不同分辨率網格融合
最后, 利用 GMT軟件對上述步驟(1)得到的多波束高分辨率網格和步驟(2)得到的低分辨率網格融合, 得到最終的網格文件, 即羅斯海高分辨率數字水深模型(圖5)。
2 結果
2.1 數據精度分析
由于交點偏差受水深的影響, 隨水深的變化而變化, 使用均方根差不能完全表達測量結果的精度高低, 因此引入相對誤差的概念對水深數據質量進行評價。主測線和檢查測線交點處水深不符值與平均值的百分比稱為相對誤差, 相對誤差愈小, 測量數據精度愈高[14]。對 Nathaniel B.Palmer調查船SeaBeam2112多波束10個航次交點差分析結果表明(圖3, 表2), 共有39 706個內部交點和外部交點, 平均交點差為1.4 m, 均方根差為 1.3。平均交點差的相對誤差為 0.3%, 均方根差的相對誤差為0.3%。共有91.8%的交點偏差小于2 m, 99.5%的交點偏差小于水深的1%。從2002年之后, Nathaniel B.Palmer調查船多波束系統型號更換為Kongsberg EM120, 到2013年共24個航次, 對其分析結果表明, 共有 4 089個內部和外部交點, 平均交
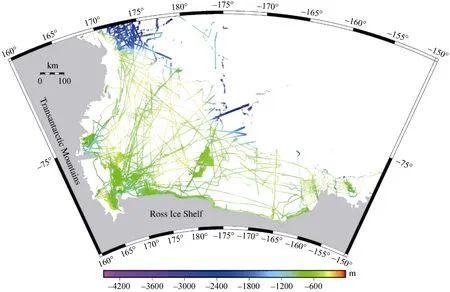
圖4 羅斯海高分辨率多波束水深地形圖Fig.4.High-resolution multi-beam bathymetric topographic maps of Ross Sea
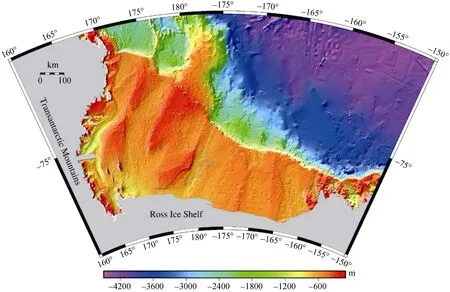
圖5 羅斯海數字水深模型Fig.5.Digital bathymetry model of Ross Sea
點偏差為1.6 m, 均方根差為19.5。平均交點差的相對誤差為0.2%, 均方根差的相對誤差為2.8%。共有70.6%的交點偏差小于2 m, 90.5%的交點偏差小于水深的1%。對全部航次計算內部交點和外部交點, 結果表明, 總交點數為45 047, 平均交點偏差為1.1 m, 均方根差為6.4。平均交點差的相對誤差為0.2%, 均方根差的相對誤差為1.5%。共有88.7%的交點偏差小于2 m, 98.3%的交點偏差小于水深的1%。
2.2 與其他產品比較
國際南大洋水深地形圖(IBCSO Version1.0)提供了南大洋500 m×500 m網格分辨率的海底地形圖,其中包括羅斯海海底水深地形圖, 其使用了許多單波束水深數據、多波束水深數據和衛星測高水深數據等, 其中多波束數據包含了羅斯海數字水深模型中的36個多波束航次數據。由于其網格間距為500 m,分辨率較低, 造成許多海底微地貌特征無法辨別,尤其是位于羅斯海陸架內的海底冰川地貌特征。而對于其他水深地形產品(SRTM30_PLUS與GEBCO_2014, 分辨率30弧秒), 分辨率比IBCSO Version1.0都要低, 因此海底冰川地貌特征更加無法辨別。
相比于IBCSO Version1.0, 羅斯海數字水深模型(RossSea_DBM)中多波束水深數據覆蓋到的區域網格間距為50 m, 其他區域雖然網格間距也為50 m, 但是這些區域是由30弧秒分辨率的 GEBCO_ 2014網格數據重采樣為50 m 網格間距后生成的, 分辨率并不高。對于存在多波束水深數據的區域, 網格分辨率為50 m, 直徑在50 m以上的海底微地形地貌特征可以很容易地被識別出來, 而在 IBCSO中, 則觀察不到這些微地貌特征。例如, 古冰川運動在海底形成的大規模線性劃痕(MSGL)可以清晰地被觀察到(圖6d),而在相同位置, SRTM30_PLUS、GEBCO_2014與IBCSO V1.0中則觀察不到這些地貌特征(圖6a, b, c)。而由于采用的多波束數據來源相同, 因此不存在是由于數據缺失造成IBCSO V1.0中觀察不到這些地貌特征的原因。
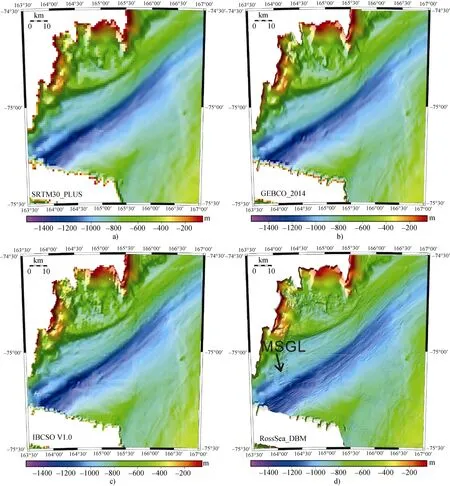
圖6 西羅斯海德里加爾斯基盆地不同種類數字水深模型比較Fig.6.Different kinds of digital bathymetric model for Drygalski Basin, West Ross Sea
3 結論與展望
本文制作的羅斯海數字水深模型中被多波束水深數據覆蓋的區域網格間距為50 m, 其他區域網格間距為30弧秒。對于50 m網格間距的區域, 海底地形地貌特征非常明顯, 古冰川進退形成的海底冰川地貌清晰可見, 可滿足羅斯海海底冰川地貌的解釋工作及綜合地質地球物理研究任務。
雖然目前羅斯海的多波束水深數據覆蓋面積較小, 但是, 隨著國內外南極科考的不斷深入, 裝備多波束回聲測深聲納系統的破冰船投入使用(比如, 雪龍號于2017年裝載了SeaBeam 3020型多波束測深儀, 在第34次南極科學考察中, 我國首次在羅斯海進行了多波束海底地形地貌的調查), 采集到的越來越多的高分辨率多波束水深數據可以不斷融合到本文的羅斯海數字水深模型中, 直至實現羅斯海多波束水深數據的全覆蓋。
