基于改進(jìn)BFO優(yōu)化的高速無人艇航向PD控制*
2018-12-27 00:07:32茅云生董早鵬曾小龍
關(guān)鍵詞:優(yōu)化
包 濤 茅云生 董早鵬 楊 鑫 曾小龍
(武漢理工大學(xué)交通學(xué)院 武漢 430063)
0 引 言
無人艇在海上高速航行過程中受風(fēng)浪流等環(huán)境干擾較大,且其航向控制系統(tǒng)具有復(fù)雜的非線性特征,這對(duì)其控制算法要求較高.Minorsky[1]提出的基于輸出反饋的PID控制器后,這種最初的自動(dòng)航向控制器獲得了長足的進(jìn)步.然而,在復(fù)雜、精細(xì)的無人艇上,粗略的傳統(tǒng)PID控制顯示出了它的缺陷,因此,各國學(xué)者開始研究一些新的航向控制方法,F(xiàn)ang等[2]采用基于神經(jīng)模糊算法的自整定控制器實(shí)現(xiàn)船舶航向最優(yōu)調(diào)整,但是實(shí)施較為復(fù)雜; Zheng等[3]基于粒子群算法進(jìn)行船舶航向控制;Sarda等[4]采用非線性比例導(dǎo)數(shù)的反推的滑模反饋控制器來控制無人艇的位置和航向,然而其僅重點(diǎn)考慮了風(fēng)對(duì)艇的影響;Kim等[5-6]則采用了遺傳算法來整定PID控制器的參數(shù);徐國平等[7-8]則在網(wǎng)絡(luò)平臺(tái)基礎(chǔ)上著重控制的簡便和實(shí)時(shí)性上做了很多努力,取得了一定的成果.
Passino[9]提出了細(xì)菌覓食算法(BFO),這是一種新式的生物智能優(yōu)化算法,和蟻群算法、粒子群算法等智能優(yōu)化算法類似,其也是一種隨機(jī)搜索算法,是通過模擬自然界生物群落行為從而尋求全局最優(yōu)的仿生優(yōu)化算法.細(xì)菌覓食算法作為一種新的機(jī)遇群體的優(yōu)化工具,其具有比其他智能算法更好的取得全局極值的能力.Pan等[10]使用細(xì)菌覓食算法進(jìn)行細(xì)胞圖像分割.考慮到算法本身較強(qiáng)的全局搜索能能力,本文將其應(yīng)用在高速無人艇的航向控制參數(shù)優(yōu)化上,但是對(duì)于傳統(tǒng)BFO算法,其同樣存在收斂速度較慢,精度受步長初值影響大等缺點(diǎn)[11],因此,本文提出了一種改進(jìn)的細(xì)菌覓食算法,加強(qiáng)了其收斂速度和控制精度,并將其應(yīng)用于船舶航向PD控制中,同時(shí)在無風(fēng)浪流干擾的理想環(huán)境和有干擾的一般環(huán)境中,分別基于實(shí)驗(yàn)室半物理仿真平臺(tái)驗(yàn)證了改進(jìn)的BFO算法的優(yōu)化效果.
1 無人艇航向操縱運(yùn)動(dòng)及風(fēng)浪流干擾模型
1.1 無人艇航向操縱運(yùn)動(dòng)模型
無人艇航向非線性操縱運(yùn)動(dòng)模型為[12]
(1)
式中:r為首搖角速率;δ為舵角;T為追隨性時(shí)間常數(shù);K為舵角增益;α為Norbbin系數(shù),其數(shù)值可以由螺旋實(shí)驗(yàn)確定;d為干擾;ψ為航向角.
1.2 無人艇風(fēng)浪流干擾模型
無人艇在航行中必然會(huì)收到環(huán)境擾動(dòng)的影響,在對(duì)無人艇航向控制進(jìn)行仿真時(shí),建立合適的擾動(dòng)模型是一個(gè)重要環(huán)節(jié).作用與無人艇的環(huán)境擾動(dòng)分為兩類,一類是風(fēng)、流擾動(dòng);另一類是海浪擾動(dòng).
在工程上,風(fēng)流擾動(dòng)可以用一個(gè)常值加上白噪聲來模擬,其就可以較好模擬風(fēng)流干擾.對(duì)于海浪擾動(dòng),按式(2)建立波浪干擾模型,模型使用譜分析理論,將有色噪聲的海浪擾動(dòng)用白噪聲經(jīng)過形成濾波器后輸出的波高來代替,再利用波高及波高變化率與擾動(dòng)力矩的關(guān)系計(jì)算出波高所對(duì)應(yīng)的擾動(dòng)力矩,根據(jù)擾動(dòng)力矩與舵角的關(guān)系,可得到海浪擾動(dòng)所對(duì)應(yīng)的舵角角度值[13].
(2)
式中:L為波高;k1為有色噪聲比例系數(shù);wgn為高斯白噪聲;G(s)為有色噪聲到波高的傳遞函數(shù);N為首搖擾動(dòng)力矩;α為航向與海浪的夾角;C1,C2,ρ1為試驗(yàn)確定的系數(shù);K為比例系數(shù),與船的尺寸、噸位、轉(zhuǎn)載等有關(guān);V為航速(m/s);δl為等效干擾舵角.
2 船舶航向控制器設(shè)計(jì)
2.1 細(xì)菌覓食算法(BFO)基本原理
BFO算法具有對(duì)初值和參數(shù)選擇不敏感、魯棒性強(qiáng)和簡單易于實(shí)現(xiàn),以及并行處理和全局搜索等優(yōu)勢(shì).該算法求解問題主要包括四個(gè)流程:趨向性操作、聚集性操作、復(fù)制性操作和遷徙性操作.在求解時(shí),用細(xì)菌在搜索空間中的位置代表所求問題的解,用適應(yīng)度函數(shù)值表示所求問題的解的好壞程度.
1) 趨向性操作 細(xì)菌在覓食過程中將會(huì)進(jìn)行旋轉(zhuǎn)和游動(dòng)兩個(gè)運(yùn)動(dòng),算法模擬細(xì)菌進(jìn)行趨向操作的具體方式為
(3)
式中:θi(j,k,l)為第i個(gè)細(xì)菌在第j次趨化,第k次復(fù)制,第l次驅(qū)散時(shí)細(xì)菌所在的位置;C(i)為細(xì)菌的游動(dòng)步長;Δ(i)為細(xì)菌在搜索空間內(nèi)的任意方向上的一個(gè)隨機(jī)向量.
2) 聚集性操作 細(xì)菌在尋找食物時(shí),每個(gè)細(xì)菌之間具有引力和斥力,引力使食物多處細(xì)菌越來越多,斥力使食物稀少處細(xì)菌越來越少.細(xì)菌聚集行為的數(shù)學(xué)模型為
(4)
式中:dat為引力的深度;wat為引力的寬度;hre為斥力的高度;wre為斥力的寬度.
通過式(4),可以修正細(xì)菌的適應(yīng)度值,使細(xì)菌聚集更迅速.
3) 復(fù)制性操作 細(xì)菌的進(jìn)化過程也符合達(dá)爾文的“適者生存、優(yōu)勝劣汰”進(jìn)化準(zhǔn)則.為了模擬進(jìn)化的過程,算法使用基于式(5)的一系列操作來模擬這種現(xiàn)象.
(5)
式(5)定義為細(xì)菌i的健康值函數(shù),其可以衡量細(xì)菌的健康值程度,即其覓食能力的大小.算法將健康值較大的一般保留并復(fù)制一次,將健康值小的一半舍棄,保證細(xì)菌群落覓食能力提升同時(shí)群落大小不變.
4) 遷徙性操作 細(xì)菌在生存環(huán)境中可能逐漸遷徙到其他環(huán)境以應(yīng)對(duì)突發(fā)的不良環(huán)境變化(如自然災(zāi)害).為了模擬這種行為,算法給定了一個(gè)既定的遷徙概率Ped,在經(jīng)過數(shù)次復(fù)制操作后,某些細(xì)菌發(fā)生遷徙.這種操作有利于算法跳出局部最優(yōu)解,從而尋找出全局最優(yōu)解.
2.2 改進(jìn)的細(xì)菌覓食算法
2.2.1趨化步長的改進(jìn)
原始算法的趨化步長是固定值,這使得算法出現(xiàn)了兩個(gè)問題,即步長大小不容易確定和不同健康值細(xì)菌之間無法體現(xiàn)出差異.
包敏[14]提出了一種新的自適應(yīng)分維步長公式為
(6)
式中:Cd為第d維的步長;stepd為第d維的初始化步長.angle為[0,360°]上的隨機(jī)數(shù).
盡管式(6)改進(jìn)了原始算法固定步長的缺點(diǎn),但是其自身依然存在一些不足:使用(j+k+l)實(shí)現(xiàn)步長的減小操作作用有限,本文將加法操作改為乘法操作,使算法前期靠近最優(yōu)值更快,后期小步幅搜索更精確;式(6)使用cos(2π(angle/360°))控制方向,該操作雖然可以實(shí)現(xiàn)尋優(yōu)方向的控制,但是每一維度都進(jìn)行360°范圍內(nèi)的前進(jìn),無疑大量進(jìn)行了無用的運(yùn)算,造成運(yùn)算速度下降,本文將其改進(jìn)為每一維度只進(jìn)行前進(jìn)或后退隨機(jī)步長,大大減小了算法運(yùn)算量.
綜上,改進(jìn)后的自適應(yīng)分維步長公式為
(7)
式中:rand為[-1,1]上的隨機(jī)數(shù).
改進(jìn)后的分維步長使細(xì)菌在每一維度分別前進(jìn)不同步長,運(yùn)算簡單,效果好.
2.2.2游動(dòng)操作的改進(jìn)
BFO算法確定步長后,隨即進(jìn)行游動(dòng)操作,但是原始算法細(xì)菌在游動(dòng)操作后進(jìn)行適應(yīng)度值的判斷,優(yōu)于上一位置繼續(xù)游動(dòng),劣于上一位置停止游動(dòng).這種操作雖然可以基本實(shí)現(xiàn)功能,但是游動(dòng)到劣勢(shì)位置的細(xì)菌無法回到原始的優(yōu)勢(shì)位置,甚至可能在隨后的游動(dòng)操作中在原始的優(yōu)勢(shì)位置和當(dāng)前的劣勢(shì)位置間不斷重復(fù),造成運(yùn)算的極大浪費(fèi).
針對(duì)這個(gè)問題,本文提出了一種智能探針操作,賦予細(xì)菌一個(gè)智能探針,對(duì)細(xì)菌即將進(jìn)入的下個(gè)位置提前使用探針計(jì)算位置適應(yīng)度值大小,優(yōu)于目前位置則前進(jìn),劣于目前位置則不前進(jìn).該操作大大加快了算法的收斂速度,解決了細(xì)菌無謂的游動(dòng)導(dǎo)致細(xì)菌前進(jìn)到較差的適應(yīng)度環(huán)境進(jìn)而可能反復(fù)游動(dòng)的缺點(diǎn).改進(jìn)后的流程框圖見圖1.
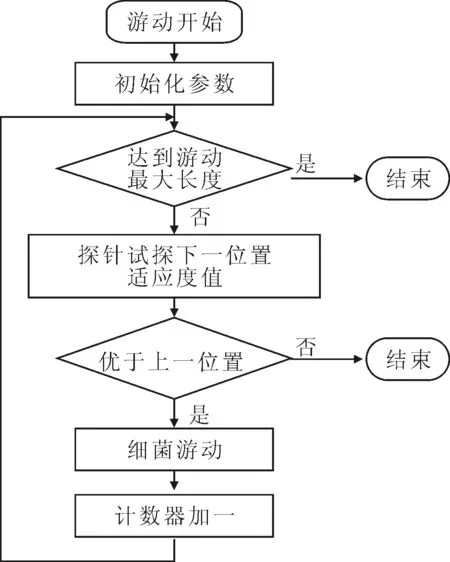
圖1 改進(jìn)的游動(dòng)操作流程圖
2.2.3驅(qū)散操作的改進(jìn)
在基本細(xì)菌覓食算法中,細(xì)菌群落將以一個(gè)固定概率Ped發(fā)生遷徙行為,從而期望改善細(xì)菌放棄局部最優(yōu)值的能力,但是該行為可能導(dǎo)致一些已經(jīng)位于最優(yōu)值附近的細(xì)菌發(fā)生遷徙,從而遠(yuǎn)離最優(yōu)值,降低算法收斂的速度.
紀(jì)震等[21]針對(duì)粒子群算法曾提出過一種自適應(yīng)的遷徙概率算法,盡管其針對(duì)的是粒子群,但是同樣也可以應(yīng)用于細(xì)菌覓食算法中,從而改進(jìn)算法的收斂性.進(jìn)行自適應(yīng)遷徙的所有細(xì)菌為
(8)
式中:Jhealth為健康值函數(shù),Ped為基本遷徙概率.
式(8)本質(zhì)上利用了輪盤賭[22]的思想進(jìn)行選擇,這使得健康值最小的細(xì)菌必定會(huì)被遷移,健康值越大,被遷移的概率也就越小.
2.3 基于改進(jìn)BFO的PD控制
盡管船舶航向的PD控制簡單、性能較好,但是其不能適應(yīng)船舶航向控制的數(shù)學(xué)模型及擾動(dòng)模型的不確定性.將智能控制理論和PD相結(jié)合成為一種新的研究方向.然而基本的BFO算法因?yàn)槠浔旧硭惴ǖ木窒扌裕谒惴ㄊ諗啃院头€(wěn)定性方面存在一定的局限性,為了達(dá)到更好的控制效果,本文將改進(jìn)的BFO算法進(jìn)入到PD控制中,通過智能算法調(diào)整PD控制器的兩個(gè)參數(shù),從而更好地達(dá)到控制船舶航向的目的.基于改進(jìn)BFO的PD航向控制結(jié)構(gòu)圖見圖2.

圖2 基于改進(jìn)BFO的PD航向控制結(jié)構(gòu)圖
2.4 適應(yīng)度函數(shù)的確定
為了使船舶航向調(diào)整快速、精確,本文選用了四個(gè)量作為適應(yīng)度函數(shù)為

ω3ts+ω4φover
(9)
式中:e(t)為系統(tǒng)偏差;Δy(t)=y(t)-y(t-1);y(t)為航向輸出;ts為調(diào)整時(shí)間;φover為絕對(duì)超調(diào)量,ω1-4為權(quán)值.
通過調(diào)整不同的權(quán)值大小,可以側(cè)重加快調(diào)整速度或者減小超調(diào)量.當(dāng)ω1較大時(shí),系統(tǒng)側(cè)重加快調(diào)整速度.當(dāng)ω2、ω4時(shí),函數(shù)側(cè)重于減小系統(tǒng)的超調(diào)量,當(dāng)ω3較大時(shí),系統(tǒng)側(cè)重于加快航向調(diào)整速度.當(dāng)權(quán)值取得合適的值后,系統(tǒng)可以減小超調(diào)量的同時(shí)加快航向的調(diào)整時(shí)間.
3 仿真實(shí)驗(yàn)及結(jié)果分析
3.1 不考慮風(fēng)浪流干擾的航向控制仿真
在不考慮風(fēng)浪流等干擾的理想環(huán)境下,BFO算法參數(shù)設(shè)置見表1.

表1 BFO算法參數(shù)設(shè)置
注:Nc-算法趨化操作次數(shù);Ns-趨化操作運(yùn)動(dòng)最大步數(shù);Nre-復(fù)制操作次數(shù);Ned-驅(qū)散操作次數(shù);S-細(xì)菌個(gè)數(shù);w1-4-適應(yīng)度函數(shù)權(quán)值
得到三種算法的最終優(yōu)化值,見表2.

表2 不同算法參數(shù)最終優(yōu)化結(jié)果
注:Kp-PD算法比例系數(shù);Kd-微分系數(shù)
由表2可知,相比傳統(tǒng)PD參數(shù)整定方法,基本BFO算法得到的三個(gè)參數(shù)具有更小的即更優(yōu)的適應(yīng)度函數(shù)值,而改進(jìn)后的BFO算法相比基本BFO算法得到的參數(shù)適應(yīng)度函數(shù)值進(jìn)一步減小,即進(jìn)一步優(yōu)化.
三種不同算法在不考慮干擾時(shí),輸入規(guī)定轉(zhuǎn)向角度為30°時(shí),航向角的變化見圖3.

圖3 不同算法航向角變化
由圖3可知,相比基本BFO算法和傳統(tǒng)PID算法,改進(jìn)后的BFO算法到達(dá)既定航向角更加迅速;相比傳統(tǒng)PD算法,超調(diào)量更小,穩(wěn)定更快.
基本BFO算法和改進(jìn)BFO算法在優(yōu)化中最佳適應(yīng)度的變化見圖4.
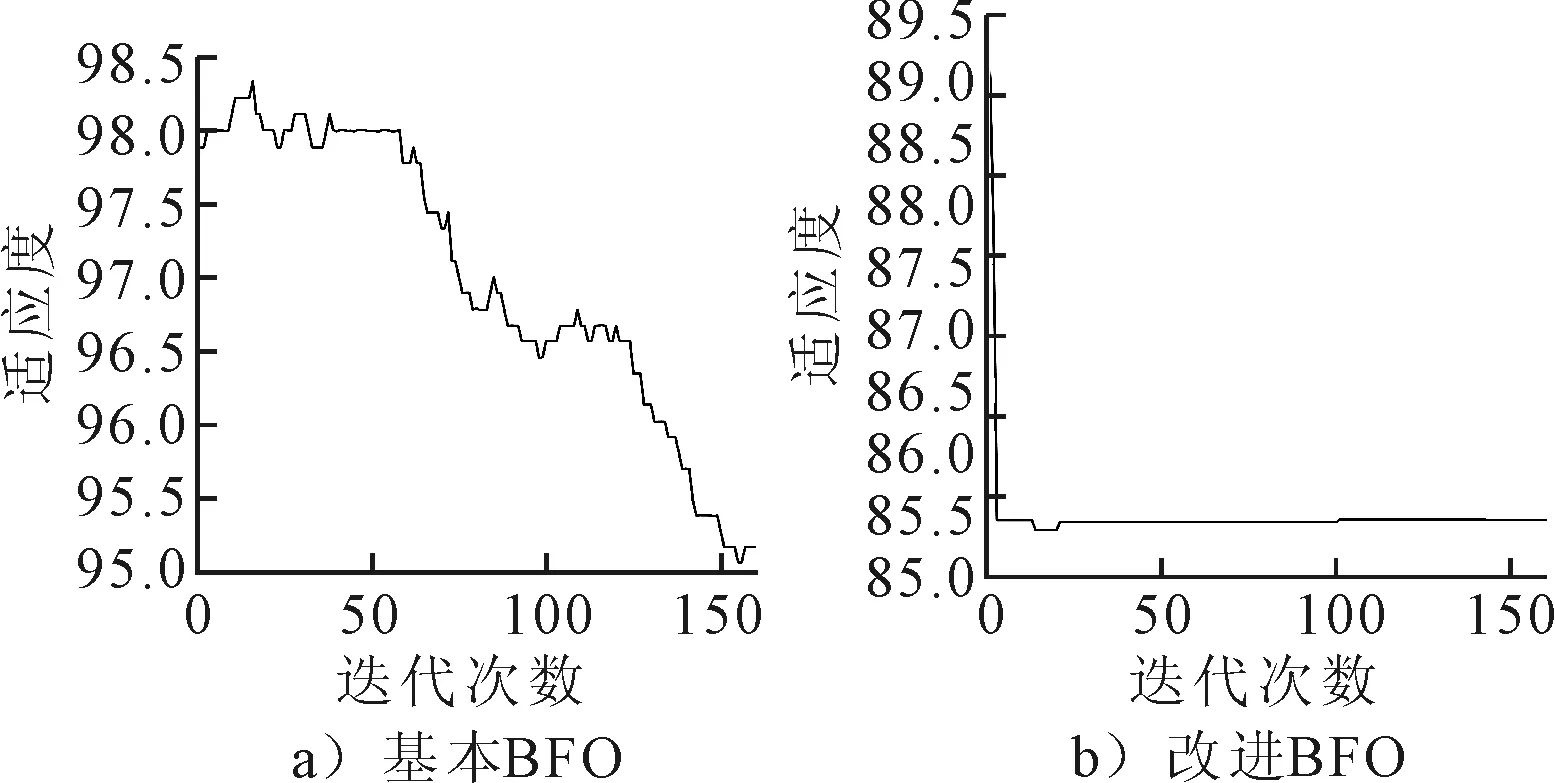
圖4 基本BFO算法和改進(jìn)BFO算法最佳適應(yīng)度
由圖4可知,改進(jìn)BFO算法可以搜索到更優(yōu)的結(jié)果,同時(shí)收斂速度明顯加快,且到達(dá)最優(yōu)值時(shí)函數(shù)值大小更加穩(wěn)定,這些都使改進(jìn)后的BFO算法擁有更優(yōu)良的控制性能.
3.2 考慮風(fēng)浪流干擾的航向控制仿真
船舶航行時(shí),不可避免的會(huì)遇到風(fēng)浪流的干擾,這些干擾會(huì)加大操舵的難度,給航行帶來安全隱患.
在考慮風(fēng)浪流的干擾時(shí),BFO算法設(shè)置參數(shù)見表3.經(jīng)過計(jì)算,三種不同算法得到的優(yōu)化值見表4,參數(shù)含義同表1~2.

表3 BFO算法參數(shù)設(shè)置
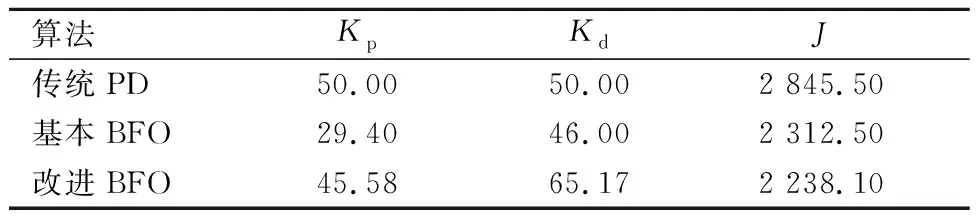
表4 考慮干擾不同算法最終優(yōu)化結(jié)果
由表4可知,改進(jìn)的BFO算法相比基本BFO和傳統(tǒng)PD算法具有更優(yōu)更小的適應(yīng)度函數(shù)值.
三種不同算法在考慮風(fēng)浪流的干擾時(shí),輸入規(guī)定轉(zhuǎn)向角度為30°時(shí),航向角的變化見圖5.

圖5 考慮干擾時(shí)的不同算法航向角變化
圖5顯示使用改進(jìn)BFO算法計(jì)算的PID參數(shù)值所構(gòu)成的PD控制器,在有風(fēng)浪流的干擾下,改進(jìn)BFO算法比傳統(tǒng)PID擁有更小的超調(diào)量,比基本BFO算法有更小的調(diào)節(jié)時(shí)間,同時(shí)后期比傳統(tǒng)PID有更強(qiáng)的穩(wěn)定性.
而在考慮風(fēng)浪流的干擾時(shí),基本BFO算法和改進(jìn)的BFO算法的計(jì)算過程同樣有所不同,兩種算法在優(yōu)化過程中適應(yīng)度值的變化見圖6.

圖6 基本BFO算法和改進(jìn)BFO算法最佳適應(yīng)度
由圖6可知,在有風(fēng)浪流的干擾下,改進(jìn)BFO算法具有更強(qiáng)的收斂性,同時(shí)在后期有更強(qiáng)的穩(wěn)定性.
4 結(jié) 論
1) 改進(jìn)的分維自適應(yīng)步長策略,實(shí)現(xiàn)了算法步長的自適應(yīng)調(diào)整,解決了基本BFO使用固定步長容易導(dǎo)致算法遺失局部最優(yōu)解的問題.
2) 智能探針操作方法,即對(duì)細(xì)菌即將進(jìn)入的下個(gè)位置提前計(jì)算位置適應(yīng)度值大小,優(yōu)于目前位置則前進(jìn),劣于目前位置則不前進(jìn),解決了基本BFO重復(fù)游動(dòng)可能性高的缺點(diǎn).
3) 自適應(yīng)遷徙概率算法的提出避免了基本BFO采用固定遷徙概率可能導(dǎo)致最優(yōu)解消失的劣勢(shì).
4) 不論在有風(fēng)浪流干擾還是沒有干擾的情況下,改進(jìn)BFO算法都比基本BFO算法展現(xiàn)出了更強(qiáng)的收斂性和穩(wěn)定性,同時(shí)擁有更好的優(yōu)化結(jié)果,改進(jìn)BFO算法克服了基本BFO算法收斂速度慢的缺陷.
5) 將改進(jìn)BFO算法應(yīng)用于船舶航向控制PID參數(shù)的尋優(yōu)中,經(jīng)過半物理仿真實(shí)驗(yàn),可以得知:不論是有風(fēng)浪流干擾還是沒有風(fēng)浪流的干擾,與基本BFO算法和傳統(tǒng)PID相比,經(jīng)過改進(jìn)BFO尋優(yōu)后的PID控制器加快了反應(yīng)速度,同時(shí)也減小了超調(diào)量,獲得了更好的控制性能.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45