反應堆關鍵電動閥門電機低電壓穿越技術研究
2018-12-29 05:18:10張斯其
微特電機 2018年12期
關鍵詞:閥門
張斯其
(中國核動力研究設計院,成都614106)
0 引言
反應堆關鍵閥門負責向反應堆內注水、余熱排出,保證整個反應堆的安全運行。這些閥門的動作性能直接關系到整個反應堆系統的安全可靠性。而電動閥門中,最為關鍵的部件便是閥門電機,閥門電機需要完成在閥門的整個行程中對閥門起始端和終止端的精確控制,同時為了保證整個反應堆的安全性,必須能夠保證任何工況和負載情況下均能夠在規定時間內完成整個開閥或關閥動作。
傳統閥門電機采用全壓直接起動并運行的方式,其在理想工況下能夠滿足設計中對于開、關閥速度的要求。但反應堆供電系統是一個特殊的系統,尤其是與安全相關的關鍵閥門往往需要在應急狀態下進行動作,在這種狀態下,整個反應堆供電系統處在孤島運行狀況下。此時電網很容易出現短時間內的供電電壓波動,這種供電電壓波動,尤其是電壓的突然下降,會使得閥門電機運行速度出現大幅度跌落,使得閥門開、關閥動作時間延長,影響反應堆的安全性。
針對傳統閥門電機控制系統在電網波動情況下存在的無法有效執行開、關閥動作的問題,本文提出了一種新型反應堆關鍵閥門電機低電壓穿越技術,在閥門電機控制中采用電壓反饋補償弱磁控制策略,即在傳統控制的弱磁曲線上,疊加相應的電壓補償量。在閥門電機運行過程中,對電機磁鏈繼續動態補償,當電網電壓出現短時間跌落,母線電壓值不足以維持當前轉速的情況下,動態判斷進入弱磁狀態,通過勵磁電流給定值動態計算以及電壓補償器的比較值來確定弱磁程度,以消除電壓跌落對于閥門電機轉速的影響。同時,與傳統的閥門電機運行方式進行了對比,在實驗中取得了良好的效果。
1 閥門電機弱磁控制原理
由于電網電壓大小的限制,以及電機驅動器中主要驅動器件電壓電流的限制,使得閥門電機在運行過程中轉速總存在一個限值,無法繼續提高。而當電網電壓下降時,這一轉速限值也隨之下降,這就是閥門電機轉速性能迅速下降的直接原因。同時,閥門電機中磁路飽和、溫升和絕緣等問題也限制了電機轉速的提高。在電壓下降的情況下,為了保證閥門電機轉速穩定在一定范圍內,不發生大幅度跌落,就需要在滿足電壓與電流約束條件的前提下,對閥門電機進行弱磁控制。
電機運行區間一般按照轉速來進行劃分,以基速ωb作為分界點。當電機運行速度低于ωb時,電機處于正常運行狀態下,這時電機能夠保持恒定轉矩輸出,此時電機磁鏈保持額定磁鏈不變,故這一區間為恒轉矩運行區間;當電機運行速度高于ωb時,電機運行受到電壓極限與電流極限的限制,若要進一步提高轉速則需要減小電機的額定磁鏈,削弱電機的負載特性以換取轉速特性,在這一區間內運行時,電機的功率保持恒定。電壓運行區間如圖1中所示。其中,ωb為運行基速角頻率,ωr為電機當前運行角頻率,ω1為電機運行速度受到電流極限圓約束下的最高角頻率,高于ω1運行角頻率的電機將只受到電壓極限圓的限制,ωe為電機同步角頻率,Te為電機電磁轉矩,Lm定轉子互感,Ls為定子電感,Lr為轉子電感,p為電機極對數。

圖1 電壓約束圓,電流約束圓和恒轉矩曲線
在運行過程中,電機轉子磁鏈的時間常數一般很長,變化很慢,所以可以根據轉子d軸電流來對轉子磁鏈給定值進行計算,如下:
根據感應電機電壓與電流方程,可得電壓約束橢圓方程,如下:

從圖1中和式(3)可以看出,電壓約束橢圓的大小隨著運行速度的增加而減小,如圖1中的橢圓與圓交叉的區域就是電機額定點的運行區域。轉矩在電流平面上可表示為反比例曲線,如下:

2 閥門電機低電壓穿越技術原理研究
本文閥門電機控制中采用電壓反饋補償弱磁控制的策略,即在傳統控制的弱磁曲線上,疊加相應的電壓補償量。在閥門電機運行過程中,對電機磁鏈繼續動態補償,以實現閥門電機的低電壓穿越,在規定時間內完成開、關閥動作,本文所采用的電壓閉環反饋表達式,如下:
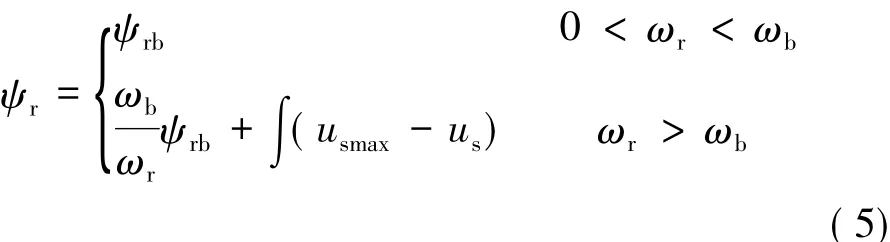
式中:ψr為當前磁鏈給定值,ψrb為初始狀態給定的額定磁鏈值。
從式(5)中可以看出,閥門電機在正常運行過程中,電機運行速度并沒有達到電壓極限圓,輸出電壓值與電壓極限圓差值為正值,調節器沒有補償作用,磁鏈給定值仍然保持在額定值,能夠有效利用閥門電機的負載驅動能力。
當母線電壓突然出現跌落時,閥門電機的基速ωb迅速下降,使得當前電壓值已經無法維持閥門電機當前轉速的運行,閥門電機運行進入弱磁區,此時電壓補償調節器將電機維持當前轉速所需要的電壓計算值與實際測量得到的電壓圓約束幅值進行比較,得到弱磁補償量,并與傳統弱磁曲線進行疊加合成。由于電壓跌落的影響,計算得到的電壓賦值總是會大于電壓極限圓,故輸出補償量永遠為負值,進一步減小給定磁鏈的值。通過這一補償量將一部分電機d軸電壓量分配給q軸進行控制,從而能夠使得閥門電機轉速穩定在額定轉速附近,不會出現大幅度的轉速波動。電壓反饋補償弱磁控制框圖如圖2所示。

圖2 電壓反饋磁鏈補償控制框圖
由于補償控制器位于反饋回路,為了避免在補償過程中出現代數環,所以補償器采用積分環節。積分環節中最重要的就是積分比例系數ki,下面對比例系數公式進行推導。
由于uqsuds,所以在求解過程中對磁鏈補償控制器進行化簡,在此假設us≈uqs,將圖2的弱磁補償控制器框圖化簡為如圖3所示。
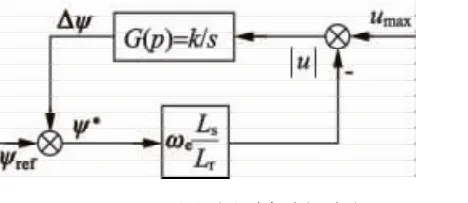
圖3 磁鏈補償控制器
由于磁鏈等于電壓的積分,令Δψ=G(p)(umax-其中,G(s)=k/s,在此設磁鏈補償值為Δψc,可得穩態時磁鏈ψ=Δψc+ψref,則:得到控制器的時間常數

時間常數的大小在很大程度上影響著系統的性能,時間常數越小代表著系統的動態性能越好,但是越小的時間常數代表著越大的積分常數,積分常數的增大在給系統帶來更高的穩定性的同時,也會使得整個控制系統開始振蕩,甚至最終使系統無法收斂。所以在系統設計中,選擇時間常數與磁鏈時間常數相等,故得到補償器積分系數如下:

式中:Tf為磁鏈時間常數
3 閥門電機低電壓穿越技術仿真研究
根據前文原理推導,可得到閥門電機低電壓穿越控制系統框圖,如圖4所示。

圖4 閥門電機低電壓穿越控制系統框圖
建立閥門電機低電壓穿越控制器仿真模型。使用的感應電機參數如表1所示。

表1 閥門電機仿真參數
圖5為從感應電機起動到出現電壓跌落,進入弱磁控制區這一時段內電機三相電流的變化情況。

圖5 起動到低電壓跌落點三相電流變化
從圖5中可以看出,起動和升速過程中電流較大,當出現電壓跌落的情況時,能夠快速進入弱磁控制區,穩定轉速。在進入弱磁控制之前存在一定的波形畸變,但在電壓跌落過程穩定后恢復正常。
仿真過程中,在500 ms時刻,突然加入15%的母線電壓跌落,并繼續保持500 ms,如圖6所示。同時為了使得仿真過程與閥門緊急關閥過程接近,并滿足負載適應性的要求,在電壓開始跌落的瞬間同時施加一個40 N·m的關閥負載轉矩。從圖6(a)中可以看出,傳統控制方式在出現電壓跌落時,電機輸出轉矩無法跟隨負載轉矩變化,轉矩減小是導致電機轉速迅速下降的最直接原因。而圖6(b)中,采用電壓反饋補償的弱磁算法來實現閥門電機低電壓穿越,由于弱磁區域控制的存在,使得輸出轉矩能夠有效跟隨給定值,能夠保證整個關閥過程中閥門電機轉速的穩定。

圖6 額定轉速下緊急關閥過程中母線電壓跌落時轉矩變化
仿真結果表明,本文的閥門電機低電壓穿越技術能夠有效克服緊急開關閥過程中母線電壓跌落的問題。
4 閥門電機低電壓穿越控制器設計
本文的閥門電機低電壓穿越控制器硬件電路及其拓撲結構如圖7所示,主要結構包括主控電路,功率驅動模塊與電機保護模塊。同時為了實現電機閉環控制功能,增加位置檢測電路與信號采集電路。

圖7 硬件電路總體設計
主功率電路采用三相全橋式的結構,同時帶有關斷續流保護結構,防止大電流沖擊。
5 實驗結果
閥門電機低電壓穿越控制器實驗平臺中閥門電機的主要參數如表2所示。
在實驗中,對閥門電機驅動實驗平臺的輸入電壓進行手動調節,用來模擬閥門電機開、關閥動作過程中出現的母線電壓跌落,母線電壓跌落值為60 V,約為母線總電壓的15%。實際電壓跌落時間控制存在一定偏差,跌落時間的控制無法像仿真一樣做到非常精確,電壓跌落時間約為300 ms。同時,在模擬的閥門電機動作過程中施加20 N·m的負載轉矩,來模擬閥門電機動作中的負載情況。電壓跌落轉速變化對比,如圖8所示。
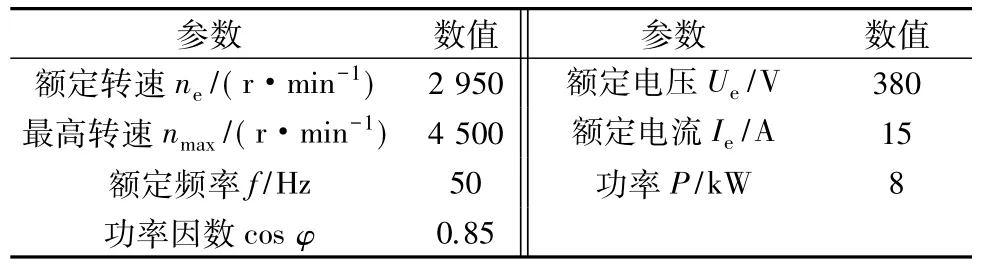
表2 閥門電機參數
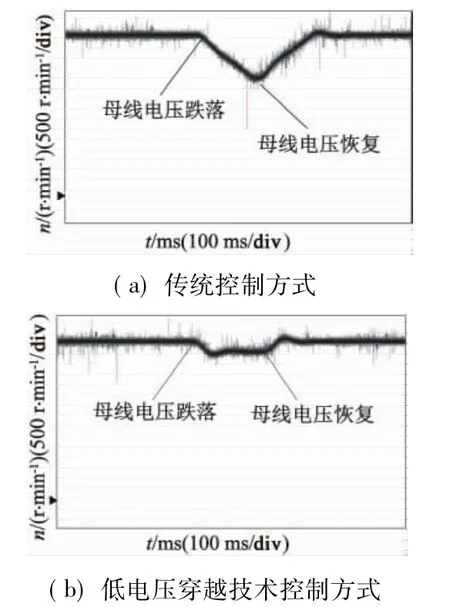
圖8 電壓跌落時轉速變化
從圖8(a)中可以看出,當母線電壓出現跌落的時刻,轉速也由于電機輸入電壓的下降而無法維持,也出現了一定程度的跌落,從2 900 r/min下降至2 500 r/min左右,直到母線電壓恢復到正常值時,才能有效跟隨給定值,在低電壓時間內閥門電機轉速均大幅低于額定轉速。
如圖8(b)所示,采用低電壓穿越技術控制算法后,在電壓出現跌落的時刻,轉速沒有發生大幅度的跌落,穩定在一定范圍內,轉速值從3 000 r/min跌至2 800 r/min左右,閥門電機基本能夠維持額定轉速運行,這說明本文的閥門電機低電壓穿越技術能夠消除電壓跌落對閥門電機轉速造成的影響。
6 結語
針對反應堆關鍵閥門電機的工作特點,本文研究了一套完整的閥門電機低電壓穿越技術,通過電壓反饋補償控制器,在電壓出現跌落時,對閥門電機進行電壓補償弱磁控制,實現閥門電機低電壓穿越,在整個低電壓時段內,轉速跌落較小,使得閥門在低電壓情況下能夠在規定時間內完成開、關閥動作,保證反應堆安全運行。實驗結果與理論分析相吻合,進一步證明本文的低電壓穿越控制策略的有效性。
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:10
流程工業(2022年3期)2022-06-23 09:41:08
流程工業(2022年3期)2022-06-23 09:41:02
流程工業(2022年3期)2022-06-23 09:40:50
流程工業(2022年5期)2022-06-23 07:19:22
流程工業(2022年5期)2022-06-23 07:19:16
中國核電(2021年3期)2021-08-13 08:57:02
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
智富時代(2018年5期)2018-07-18 17:52:04
