基于一維激光雷達(dá)數(shù)據(jù)的交通車輛分類研究
2019-01-02 09:01:18尹寧浩,劉瑞安,劉楠,曾貝貝
軟件 2019年12期
尹寧浩,劉瑞安,劉楠,曾貝貝
摘 ?要: 為滿足特殊場景中交通管理系統(tǒng)的高時(shí)效性、高準(zhǔn)確率、低成本需求,本文以一維激光雷達(dá)距離數(shù)據(jù)為基礎(chǔ),將RGB圖像、SAR圖像等視覺圖像處理方法中使用的角點(diǎn)特征的概念用于一維離散數(shù)據(jù),從而獲取一維離散數(shù)據(jù)的輪廓特征。本文提出了利用均值差變和離差獲得離散角點(diǎn)數(shù)據(jù)的方法,然后通過對(duì)數(shù)據(jù)樣本的長、寬、高、離散角點(diǎn)數(shù)據(jù)等信息進(jìn)行分析,獲得每類目標(biāo)的統(tǒng)計(jì)特征,進(jìn)一步調(diào)整基于決策樹的分類系統(tǒng)參數(shù),提高目標(biāo)分類的準(zhǔn)確率。實(shí)驗(yàn)結(jié)果表明,該方法對(duì)目標(biāo)分類的正確率在91%以上,能夠滿足特定環(huán)境場景的需求。
關(guān)鍵詞: 激光雷達(dá);一維距離數(shù)據(jù);角點(diǎn);目標(biāo)分類
中圖分類號(hào): TN181 ? ?文獻(xiàn)標(biāo)識(shí)碼: A ? ?DOI:10.3969/j.issn.1003-6970.2019.12.045
本文著錄格式:尹寧浩,劉瑞安,劉楠,等. 基于一維激光雷達(dá)數(shù)據(jù)的交通車輛分類研究[J]. 軟件,2019,40(12):206210
Car Classification Based on One-Dimensional Lidar Data
YIN Ning-hao, LIU Rui-an, LIN Nan, ZENG Bei-bei
(College of Electronic and Communication Engineering of Tianjin Normal University, Tianjin, 300387, China)
【Abstract】: To meet the high timeliness, high accuracy and low cost requirements of the traffic management system ? in special scenarios. This paper uses the one-dimensional lidar distance data as the basis, and applies the corner features from the visual image processing methods such as RGB images and SAR images to one-dimensional discrete data, thereby obtaining the contour features of the one-dimensional discrete data. In this paper, a method of obtaining discrete corner data using mean difference variation and dispersion is proposed. Then, by analyzing the length, width, height and discrete corner data, etc, the statistical characteristics of each type of target are obtained. It is used to adjust the parameters of the classification system that based on decision tree to improve the accuracy of the target classification. The experimental results show that the correct rate of the target classification is over 91%, which can meet the needs of specific environmental scenarios.
【Key words】: Lidar; One-dimensional distance data; Corner; Target classification
0 ?引言
近幾年,國產(chǎn)汽車的產(chǎn)量以及質(zhì)量不斷地提高,加之人們對(duì)高質(zhì)量生活的向往,使得國內(nèi)汽車數(shù)量在短期內(nèi)急速增長,尤其在三四線城市。因此,加強(qiáng)車輛以及道路管理,優(yōu)化交通系統(tǒng)的需求也亟待滿足。在這些欠發(fā)達(dá)的地區(qū),現(xiàn)存的交通管理系統(tǒng)過于低端老舊的,不能很好地滿足新時(shí)代新的需求;這些系統(tǒng)通常是基于視覺圖像的,極易受到天氣以及光線的影響。激光雷達(dá)傳感器以其特有的優(yōu)勢逐漸成為新興的數(shù)據(jù)采集傳感器,其具有遠(yuǎn)距離測距能力,能有效地監(jiān)測目標(biāo)物體的方位和深度信息,受天氣、光照等條件的影響較小。
付林等[1]利用激光雷達(dá)獲取一維目標(biāo)距離像,使用時(shí)間序列分析法,并構(gòu)建最小二乘估計(jì)器和線性滑動(dòng)更新器,實(shí)現(xiàn)對(duì)目標(biāo)的特征提取,最終可以實(shí)時(shí)對(duì)目標(biāo)進(jìn)行識(shí)別。陳曉清等[2]首先對(duì)激光雷達(dá)數(shù)據(jù)進(jìn)行二維小波變換提取奇異值特征,然后利用遺傳算法對(duì)支持向量機(jī)進(jìn)行訓(xùn)練,取得較好識(shí)別效果。馬君國等[3]從高維距離像中提取多種不變矩構(gòu)成組合矩,利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對(duì)地面目標(biāo)進(jìn)行分類識(shí)別,在低載噪比下獲得較高的識(shí)別率,但是成本較高。于加其等[4]通過激光雷達(dá)獲取三維點(diǎn)云圖像,對(duì)目標(biāo)進(jìn)行分割后,綜合目標(biāo)的長寬高信息以及姿態(tài)特征,構(gòu)建人工神經(jīng)網(wǎng)絡(luò)對(duì)特征進(jìn)行訓(xùn)練,具有較好的識(shí)別率和容錯(cuò)性。孫劍鋒等[5]采用激光雷達(dá)強(qiáng)度像,使用SVM對(duì)樣本進(jìn)行訓(xùn)練,并利用數(shù)字信號(hào)處理以滿足單幀實(shí)時(shí)性要求。以上研究內(nèi)容多使用高維激光雷達(dá)圖像為源數(shù)據(jù),包含的信息量很大,計(jì)算量也大,而且獲取源數(shù)據(jù)的成本較高,數(shù)據(jù)處理的實(shí)時(shí)性也有待提高。為滿足特定環(huán)境下的交通管理的需求,本文使用激光雷達(dá)獲取一維距離數(shù)據(jù),可從根本上降低計(jì)算量和成本,保證高時(shí)效性。由于一維離散數(shù)據(jù)所包含的有效信息過于稀少,本文首次將視覺圖像處理方法中的角點(diǎn)概念用于一維離散數(shù)據(jù)中,從而豐富數(shù)據(jù)的信息量,在不提高計(jì)算量的情況下,獲得盡可能多的有效信息。
一般情況下,二維圖像中灰度改變劇烈的點(diǎn)或圖像輪廓邊緣上曲率達(dá)到極大值的點(diǎn)稱為角點(diǎn)(Corner)[6]。目前,角點(diǎn)檢測的方法主要分為基于圖像灰度的方法和基于邊緣輪廓的方法。陳繼華等[7]提出了一種改進(jìn)的輪廓曲線角點(diǎn)檢測方法,改善傳統(tǒng)基于邊緣輪廓的角點(diǎn)檢測方法的漏檢和誤檢測問題,有效地提高準(zhǔn)確率。李云紅等[8]提出利用不同方向的Gabor濾波器對(duì)圖像進(jìn)行平滑,能有效的減少漏檢的概率,但是檢測算法的重復(fù)率不如傳統(tǒng)的算法。張倩[9]首次將二階輪廓差分的特性用于角點(diǎn)響應(yīng)的判斷,更為精確地判斷輪廓的彎曲程度,從而選定角點(diǎn)。廖夢怡等[10]提出SGP算法有效地改善光照強(qiáng)烈變化情況下圖像灰度值的差異性變化,該算法在視頻幀中,平均耗時(shí)少,檢測效率較之前幾種傳統(tǒng)算法(Fast算法、Harris算法[11])高,但在仿射變換情況下,正確率一般。駱榮坤等[12]基于現(xiàn)有的算法提出了基于四鄰域?qū)蔷€上灰度約束的角點(diǎn)檢測方法,并采用 SINC函數(shù)灰度分布約束角點(diǎn)位置,從而實(shí)現(xiàn)亞像素級(jí)精度的角點(diǎn)檢測。可知,目前關(guān)于角點(diǎn)的方法都主要集中在視覺圖像等連續(xù)數(shù)據(jù)的處理方法中,算法的基礎(chǔ)都是可視化的圖像數(shù)據(jù)。易知,角點(diǎn)的方法主要用于獲取圖像邊緣特征,而本文的數(shù)據(jù)基礎(chǔ)就是關(guān)于目標(biāo)邊緣的離散數(shù)據(jù)。為實(shí)現(xiàn)離散角點(diǎn)的想法,本文使用均值差變以及離差的方法獲得目標(biāo)的角點(diǎn)數(shù)據(jù),豐富目標(biāo)數(shù)據(jù)的信息量,然后利用統(tǒng)計(jì)特征優(yōu)化分類系統(tǒng),最終將車輛分為小客車(car)、大客車(bus)、小貨車(small truck)、中貨(medium truck)、大貨(big truck)、特大貨車(huge truck)以及摩托(moto)(包括電動(dòng)車、自行車等非客非貨車)。
1 ?算法理論
1.1 ?一維激光雷達(dá)距離數(shù)據(jù)的獲取
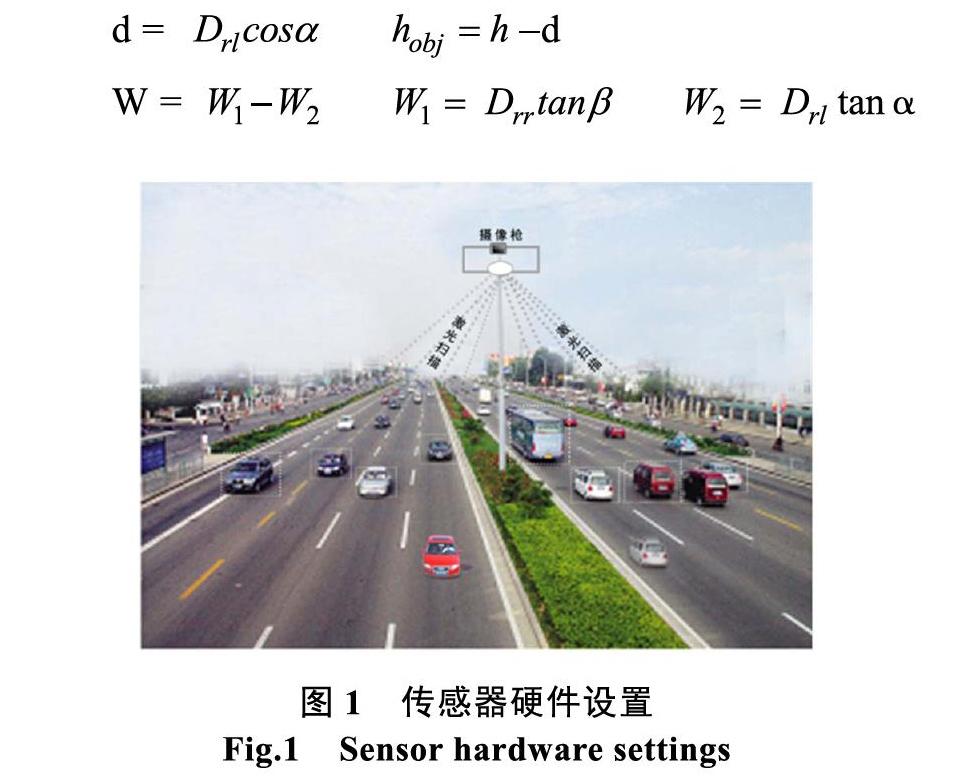
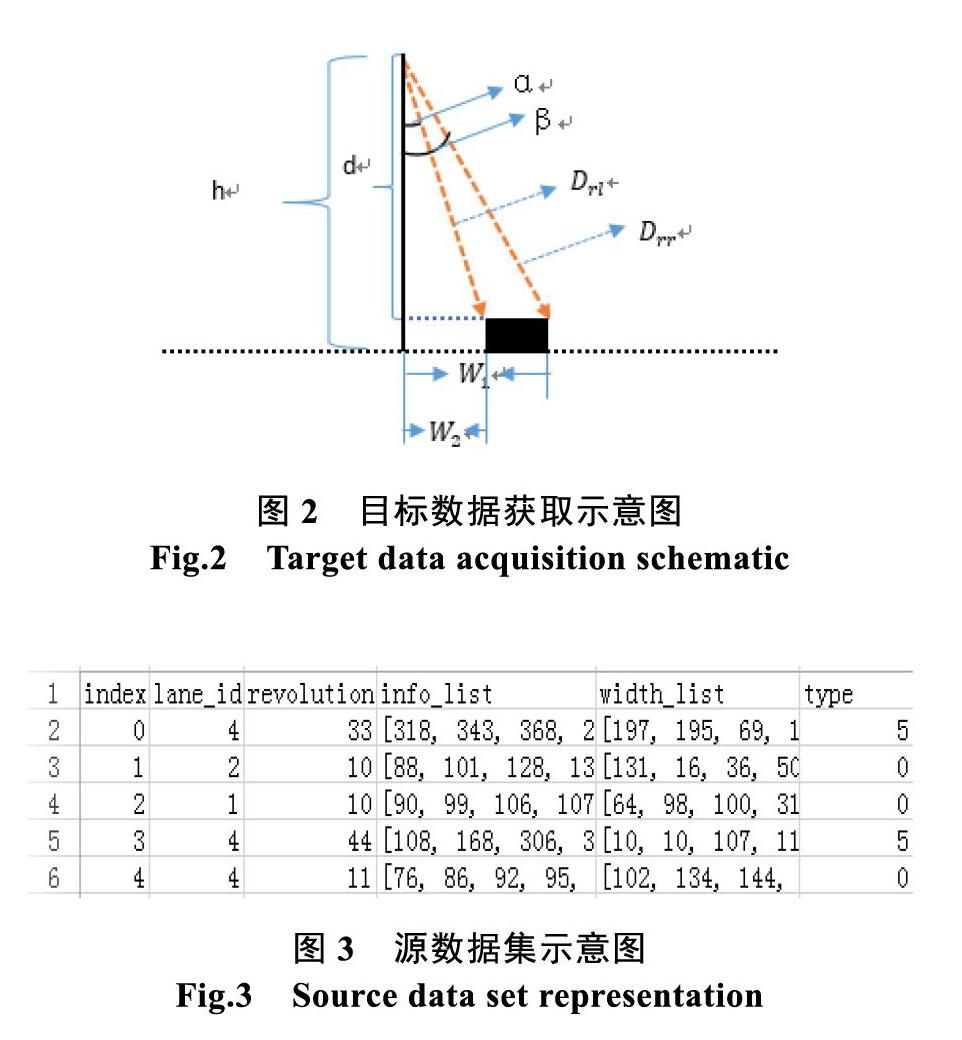
隨著傳感器技術(shù)的不斷發(fā)展,激光雷達(dá)傳感器也不斷的革新以滿足不同的場景需求,所得的數(shù)據(jù)量和數(shù)據(jù)種類越來越多,為高精度的數(shù)據(jù)處理帶來便利,但在一些簡單場景下,過大的數(shù)據(jù)量,反而給計(jì)算帶來難題。為從根本上保持分類系統(tǒng)的時(shí)效性,本文使用一維激光雷達(dá)距離數(shù)據(jù),傳感器安裝方式如圖1,利用激光的最基本特性獲取傳感器距目標(biāo)的距離,以及距地面的距離,從而求差得到此刻目標(biāo)的高度數(shù)據(jù)。由于采用的激光雷達(dá)的掃描是一個(gè)三角形面,車輛的前進(jìn)方向與掃描面的垂直的,所以從車頭經(jīng)過掃描面開始到車尾離開掃描面,激光雷達(dá)不斷的發(fā)射脈沖,每次發(fā)射脈沖到收到回波為一個(gè)掃描周期,獲得此時(shí)車輛的高度信息,車輛完全穿過掃描面后得到的離散數(shù)據(jù)構(gòu)成了該車的一維距離數(shù)據(jù)。計(jì)算示意圖如圖2,假設(shè)傳感器安裝高度為h,傳感器的掃描面輻射地面的寬度是已知的,這樣就可以根據(jù)目標(biāo)所在位置得到夾角或者,傳感器到達(dá)目標(biāo)的距離可通過傳感器獲得,假設(shè)為圖中所示和,那么可根據(jù)如下公式計(jì)算目標(biāo)的高度和寬度信息,計(jì)算公式:
d = d
W = ? ? ? tanα
圖1 ?傳感器硬件設(shè)置
Fig.1 ?Sensor hardware settings
以上示例是單一目標(biāo)的數(shù)據(jù)獲取,而實(shí)際應(yīng)用中,應(yīng)如圖1所示的場景,車輛在不同的車道持續(xù)不斷地穿過激光雷達(dá)的三角形掃描面。此時(shí),如何區(qū)分不同目標(biāo)的數(shù)據(jù)也極其重要。當(dāng)有車輛在掃描面時(shí),獲得的高度數(shù)據(jù)始終是大于0的,所以當(dāng)獲得數(shù)據(jù)是0時(shí),可作為判斷接下來的數(shù)據(jù)是否是當(dāng)前目標(biāo)的數(shù)據(jù)。考慮到噪聲因素,所以本文將連續(xù)n個(gè)值為0(n>=2)作為判斷是否為同一目標(biāo)的閾值,這樣就可以有目的的獲取目標(biāo)數(shù)據(jù)。為便于后期處理,本文將獲得的數(shù)據(jù)以CSV的形式保存,包括目標(biāo)的全部高度數(shù)據(jù),掃描周期數(shù),所在車道,寬度數(shù)據(jù)以及目標(biāo)類型,圖3是以Excel軟件打開的一個(gè)數(shù)據(jù)集形式。
圖2 ?目標(biāo)數(shù)據(jù)獲取示意圖
Fig.2 ?Target data acquisition schematic
圖3 ?源數(shù)據(jù)集示意圖
Fig.3 ?Source data set representation
1.2 ?一維離散數(shù)據(jù)角點(diǎn)原理
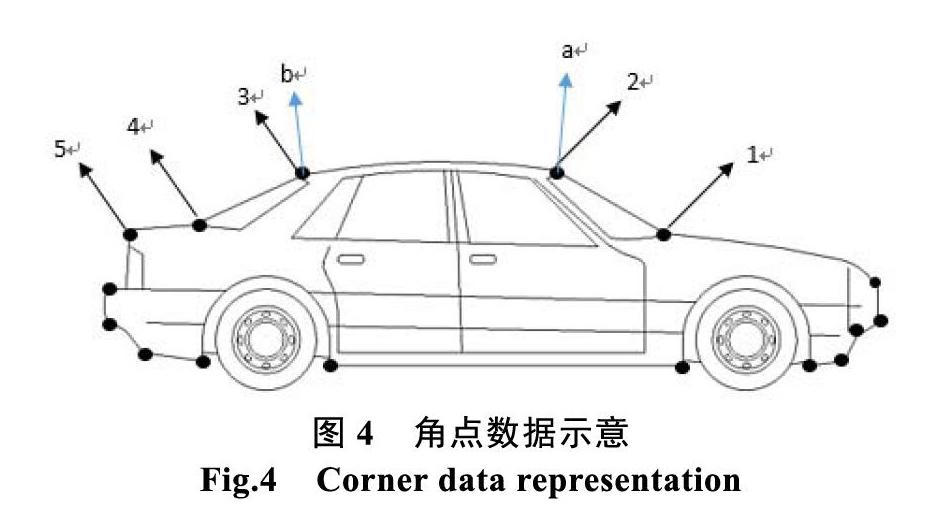
如圖4所示,假如忽略圖中小客車的細(xì)節(jié)內(nèi)容,只考慮外部輪廓,以視覺圖像中角點(diǎn)檢測的方法處理,得到的角點(diǎn)數(shù)據(jù)應(yīng)是圖中黑色圓點(diǎn)的位置。如果只考慮車輛頂部的輪廓,則可以作為角點(diǎn)的數(shù)據(jù)是標(biāo)號(hào)為1~4的黑色圓點(diǎn)。基于角點(diǎn)的基本概念,可以發(fā)現(xiàn)圖中角點(diǎn)所在位置,皆是狀態(tài)發(fā)生明顯變化的位置,而在本文的源數(shù)據(jù)中,一個(gè)目標(biāo)所有的數(shù)據(jù)是該目標(biāo)頂部輪廓的離散表示,但是由于車輛處于高速行駛的過程中,所以其頂部輪廓的離散狀態(tài)并不會(huì)和圖示車輛頂部離散化的一樣。所以,在本文的離散數(shù)據(jù)中能夠表征目標(biāo)頂部輪廓明顯變化的點(diǎn)是類似1~4的黑色原點(diǎn),然而,在實(shí)際實(shí)驗(yàn)中發(fā)現(xiàn),點(diǎn)1和2可考慮為一個(gè)位置的變化,3和4同樣如此,那么最終,我們要獲得就是像a,b這樣的點(diǎn)。因?yàn)椴煌愋偷能囕v的頂部輪廓是不同的,所以其頂部的突出特征也不相同,為獲得離散數(shù)據(jù)的角點(diǎn),本文提出了一種基于均值差變和離差的離散數(shù)據(jù)的角點(diǎn)檢測的方法。
圖4 ?角點(diǎn)數(shù)據(jù)示意
Fig.4 ?Corner data representation
1.3 ?基于均值差變和離差的角點(diǎn)判斷
通過對(duì)源數(shù)據(jù)分析發(fā)現(xiàn),源數(shù)據(jù)中相鄰位置的元素的差值變化太大,作為判斷角點(diǎn)的基礎(chǔ)時(shí),就會(huì)出現(xiàn)以下情況:(1)當(dāng)以能夠確定是角點(diǎn)的突變差值作為閾值時(shí),可能出現(xiàn)偽角點(diǎn)的問題;(2)以剔除偽角點(diǎn)為目的設(shè)置閾值時(shí),可能會(huì)出現(xiàn)漏檢的問題。可見,使用源數(shù)據(jù)的相鄰差不能有效的確定突變點(diǎn)的位置。為解決以上問題,首先要減少疑似點(diǎn)的數(shù)量。已知目標(biāo)頂部輪廓的大致特征,除突變處之外,大多數(shù)據(jù)點(diǎn)處于平穩(wěn)的狀態(tài),即數(shù)據(jù)應(yīng)該是相同或者差值在5厘米以內(nèi)的。本文提出使用均值差變和離差來獲取目標(biāo)數(shù)據(jù)中發(fā)生突變的點(diǎn),也即離散數(shù)據(jù)的角點(diǎn)。
均值差變顧名思義就是均值的差值變化。首先,根據(jù)公式(1)逐一計(jì)算目標(biāo)數(shù)據(jù)對(duì)應(yīng)位置時(shí)的均值,即從目標(biāo)數(shù)據(jù)的第一個(gè)數(shù)據(jù)開始,求每增加一個(gè)數(shù)據(jù)對(duì)應(yīng)的均值,作為一個(gè)新的列表。然后求得源數(shù)據(jù)與對(duì)應(yīng)均值的離差,得到一個(gè)關(guān)于源數(shù)據(jù)與對(duì)應(yīng)均值的離差的新數(shù)據(jù)(列表)。
(為第i個(gè)數(shù)據(jù)值) (1)
通過分析離差列表,可以確定目標(biāo)頂部輪廓的變化趨勢,獲得數(shù)據(jù)發(fā)生突變的點(diǎn),即疑似角點(diǎn)的數(shù)據(jù)。通過對(duì)比疑似點(diǎn)列表與原始數(shù)據(jù)發(fā)現(xiàn),疑似點(diǎn)列表的首尾元素就是突變的數(shù)據(jù),也就是說角點(diǎn)就是這兩個(gè)元素所在位置。L為隨機(jī)選擇的某小客車的高度數(shù)據(jù)列表,L = [83, 92, 99, 103, 118, 133, 143, 146, 148, 146, 143, 141, 104]。根據(jù)均值公式求得數(shù)據(jù)L的均值A(chǔ)_L=[83,88,91,94,99,105,110,115, 118,121,123,125,123],為計(jì)算方便A_L的數(shù)據(jù)都經(jīng)過取整處理,根據(jù)離差的定義求得源數(shù)據(jù)的均值差變,然后結(jié)合源數(shù)據(jù)分析并選擇合適的閾值,找到疑似點(diǎn)的數(shù)據(jù)列表[133, 143, 146, 148, 146, 143]以及它們的索引[5,6,7,8,9,10,11](索引,是程序處理中對(duì)序列類數(shù)據(jù)元素定位的表示方法,位置對(duì)應(yīng)從0開始)。分析疑似數(shù)據(jù)可知,這些數(shù)據(jù)是源數(shù)據(jù)中發(fā)生突變后的數(shù)據(jù),而角點(diǎn)是指發(fā)生開始突變的數(shù)據(jù),即疑似數(shù)據(jù)列表的首尾元素。通過編程對(duì)疑似數(shù)據(jù)列表處理得到索引為5的數(shù)據(jù)133是第一個(gè)角點(diǎn),索引為11的數(shù)據(jù)143是第二個(gè)角點(diǎn),其中第一個(gè)角點(diǎn)是突變增大的點(diǎn),而第二個(gè)角點(diǎn)是突變減小的點(diǎn)。
通過對(duì)源數(shù)據(jù)進(jìn)行離散角點(diǎn)的處理,我們可以獲得關(guān)于目標(biāo)頂部輪廓的變化狀態(tài),豐富了源數(shù)據(jù)的信息量,從而為準(zhǔn)確識(shí)別車輛的類型提供除長寬高以外,可描述的特征。基于以上,目前獲得關(guān)于目標(biāo)的數(shù)據(jù)包括長度表征(掃描周期數(shù))、高度、寬度、所在車道以及角點(diǎn)數(shù)據(jù)(包括突變增大點(diǎn)、突變減小點(diǎn)的位置和個(gè)數(shù))。其中長度是在目標(biāo)以高速穿過掃描面后所獲得的掃描周期數(shù),只能表示目標(biāo)的相對(duì)長度,而寬度數(shù)據(jù)由于并不是傳感器的主要作用,所以這兩類數(shù)據(jù)不能以現(xiàn)實(shí)知識(shí)作評(píng)判,所以提出利用統(tǒng)計(jì)特征獲取每一類目標(biāo)的有關(guān)特征。
1.4 ?統(tǒng)計(jì)特征的獲取
統(tǒng)計(jì)特征是使用數(shù)理統(tǒng)計(jì)的方法,從所有數(shù)據(jù)中獲得構(gòu)成總體中某類個(gè)體的某些特征,在用數(shù)理統(tǒng)計(jì)方法研究總體時(shí),我們關(guān)注不再是組成總體的各個(gè)個(gè)體本身,而是與它們相聯(lián)系的某些特征。首先,根據(jù)獲取數(shù)據(jù)時(shí),記錄的視覺圖像數(shù)據(jù)對(duì)部分目標(biāo)的一維離散數(shù)據(jù)進(jìn)行標(biāo)簽化處理。然后,分別抽取不同類型的車輛數(shù)據(jù),作為輸入獲得對(duì)應(yīng)的角點(diǎn)數(shù)據(jù),最后分別對(duì)每一類目標(biāo)的長、寬、高、所在車道以及角點(diǎn)數(shù)據(jù)進(jìn)行數(shù)據(jù)統(tǒng)計(jì),獲得每一類目標(biāo)對(duì)應(yīng)的統(tǒng)計(jì)特征,并根據(jù)所得的統(tǒng)計(jì)特征對(duì)分類系統(tǒng)進(jìn)行微調(diào)。其中通過角點(diǎn)數(shù)據(jù)可以根據(jù)突變增大和突變減小點(diǎn)的位置,對(duì)目標(biāo)頂部輪廓有基本的表示,所以在獲取統(tǒng)計(jì)特征時(shí),角點(diǎn)數(shù)據(jù)包含的信息是重要內(nèi)容。由于角點(diǎn)數(shù)據(jù)包含的部分特征表述起來較為復(fù)雜,所以文中僅給出易于用表格展示的部分特征,如表1。
表1 ?統(tǒng)計(jì)特征
Tab.1 ?Statistical characteristics
Car_
model I(掃描
周期數(shù)) h_A(高
度均值) w_A(寬
度均值) C_con
(連續(xù)點(diǎn)數(shù)) C(角
點(diǎn)數(shù))
car [7,22] [100,190] [100,180] [2,15] [1,3)
bus [15,30] [265,330] [130,230] [5,12] [2,4]
st [8,25] [123,246] [60,196] [5,16] [2,4]
mt [15,27] [188,334] [160,240] [10,21] [2,3]
t [26,37] [330,380] [117,230] [16,26] [2,6]
ht [38,72] [215,380] [143,240] [27,40] [3,5]
moto [,8] [60,150] [ ,100] [ ,3] 不考慮
2 ?實(shí)驗(yàn)分析及結(jié)果
我們設(shè)計(jì)并訓(xùn)練了用于本文目標(biāo)的決策樹作為分類系統(tǒng)的核心,按照表1的獲得的統(tǒng)計(jì)特征以及角點(diǎn)數(shù)據(jù)中未在表中顯示的特征對(duì)分類系統(tǒng)進(jìn)行微調(diào)。之后,使用剩余未打標(biāo)簽的數(shù)據(jù)對(duì)系統(tǒng)進(jìn)行測試。首先,從所有未打標(biāo)簽的數(shù)據(jù)包中隨機(jī)抽取5個(gè)數(shù)據(jù)包分別編號(hào)為:1,2,3,4,5,每個(gè)數(shù)據(jù)包中所含的目標(biāo)數(shù)據(jù)的個(gè)數(shù)是不同的。對(duì)編號(hào)后數(shù)據(jù)包的數(shù)據(jù)進(jìn)行排查,剔除無效數(shù)據(jù)(數(shù)據(jù)中間存在明顯不符事實(shí)的數(shù)據(jù)點(diǎn)),其中數(shù)據(jù)包1共有45個(gè)目標(biāo)數(shù)據(jù),包含1個(gè)無效數(shù)據(jù);數(shù)據(jù)包2共有45個(gè)目標(biāo)數(shù)據(jù),包含3個(gè)無效數(shù)據(jù);數(shù)據(jù)包3共有70個(gè)目標(biāo)數(shù)據(jù),包含3個(gè)無效數(shù)據(jù);數(shù)據(jù)包4共有39個(gè)目標(biāo)數(shù)據(jù),包含2個(gè)無效數(shù)據(jù);數(shù)據(jù)包5共有49個(gè)目標(biāo)數(shù)據(jù),包含1個(gè)無效數(shù)據(jù)。剔除無效數(shù)據(jù)后,總數(shù)據(jù)個(gè)數(shù)為248,將這些數(shù)據(jù)依次作為車輛分類系統(tǒng)的輸入,利用前述的方法識(shí)別出車輛目標(biāo)的類型。
2.1 ?算法性能
(1)數(shù)據(jù)包1共44個(gè)有效數(shù)據(jù),其中car類共有33個(gè),錯(cuò)誤識(shí)別3個(gè);moto類3個(gè);truck類共8個(gè),錯(cuò)誤識(shí)別2個(gè)(1個(gè)st,1個(gè)mt);該數(shù)據(jù)包中的數(shù)據(jù)的識(shí)別率為88.6%。
(2)數(shù)據(jù)包2共有42個(gè)有效數(shù)據(jù),car類35個(gè),錯(cuò)誤識(shí)別3個(gè);moto類2個(gè);truck類5個(gè),錯(cuò)誤識(shí)別1個(gè)(st),正確識(shí)別率為90.5%。
(3)數(shù)據(jù)包3共有有效數(shù)據(jù)67個(gè),其中car類57個(gè),錯(cuò)誤識(shí)別3個(gè);truck類9個(gè),錯(cuò)誤識(shí)別2個(gè)(1個(gè)st,1個(gè)mt);bus類1個(gè),該數(shù)據(jù)包的正確識(shí)別率為92.5%。
(4)數(shù)據(jù)包4共有37個(gè)有效數(shù)據(jù),其中car類34個(gè),錯(cuò)誤識(shí)別3個(gè);bus類1個(gè),truck類2個(gè),該數(shù)據(jù)包的正確識(shí)別率為91.9%。
(5)數(shù)據(jù)包5共有48個(gè)有效數(shù)據(jù),其中car類41個(gè),錯(cuò)誤識(shí)別2個(gè);bus類2個(gè);truck類6個(gè),錯(cuò)誤識(shí)別1個(gè)(st),該數(shù)據(jù)包的正確識(shí)別率為93.7%。如圖5所示。
2.2 ?結(jié)果分析
由以上實(shí)驗(yàn)數(shù)據(jù)可知,本次實(shí)驗(yàn)抽樣的數(shù)據(jù)總體為248個(gè)目標(biāo),其中有效數(shù)據(jù)238個(gè)。本文在數(shù)據(jù)有效的前提下進(jìn)行實(shí)驗(yàn)分析,其中正確識(shí)別218個(gè),總體的正確識(shí)別率為91.6%。根據(jù)實(shí)驗(yàn)結(jié)果的數(shù)據(jù)可以看出,道路中的車輛以小汽車(car)為主
圖5 ?實(shí)驗(yàn)結(jié)果分析圖
Fig.5 ?Analysis of experimental results
要車輛類型,總體識(shí)別率在90%以上。從錯(cuò)誤識(shí)別的數(shù)據(jù)分析,發(fā)現(xiàn)貨車類(truck),雖然數(shù)量不多,但是錯(cuò)誤識(shí)別數(shù)量相對(duì)于它的總量來說較高,總體識(shí)別率較低,而且多集中在小貨車(small truck)中,可能原因在于部分小貨車在經(jīng)過掃描后,在數(shù)據(jù)量以及數(shù)據(jù)值上與小汽車(car)接近,而且離散角點(diǎn)信息也很接近,另一種原因是truck類的目標(biāo)數(shù)據(jù)過少,在獲取的統(tǒng)計(jì)特征由于數(shù)據(jù)量的局限,使得所得關(guān)于truck類的特征不夠全面。
3 ?總結(jié)
本文針對(duì)在一些特定區(qū)域交通系統(tǒng)的需求,利用一維激光雷達(dá)距離數(shù)據(jù),使用了在視覺圖像處理常用的角點(diǎn)特征的概念,提出使用均值差變和離差獲得目標(biāo)數(shù)據(jù)的離散角點(diǎn)數(shù)據(jù),極大豐富了原始數(shù)據(jù)的信息量,并充分利用目標(biāo)對(duì)象的統(tǒng)計(jì)特征,設(shè)計(jì)基于決策樹的分類系統(tǒng),從而獲得較高識(shí)別率的車輛分類系統(tǒng)。通過分析實(shí)驗(yàn)數(shù)據(jù)發(fā)現(xiàn),當(dāng)前系統(tǒng)對(duì)small truck類目標(biāo)的識(shí)別率有待提高。本文的研究是致力于為特定環(huán)境需求提供盡可能均衡的方法,采用過低的信息量對(duì)目標(biāo)分類的實(shí)時(shí)性有一定的好處,但對(duì)識(shí)別精度有較大影響,如果用于對(duì)精度要求較高的場景,足夠的數(shù)據(jù)信息量是必要的。此外,由于在離散數(shù)據(jù)中使用角點(diǎn)數(shù)據(jù)是一個(gè)新的
嘗試,可能存在一些有待改進(jìn)地方,在未來的工作中會(huì)進(jìn)一步探求并改進(jìn)。除此之外,數(shù)據(jù)種類的均衡性或許對(duì)目標(biāo)分類有一定影響,可嘗試通過對(duì)少數(shù)類特有特征的提取,從而提高少數(shù)類目標(biāo)的分類準(zhǔn)確率。
參考文獻(xiàn)
[1]付林, 李振華, 卞保民. 激光雷達(dá)一維距離像的特征提取與目標(biāo)識(shí)別算法研究[J]. 彈道學(xué)報(bào), 2004(01): 82-85+90.
[2]陳曉清, 馬君國, 趙宏鐘, 付強(qiáng). 基于二維小波變換的激光成像雷達(dá)目標(biāo)識(shí)別算法[J]. 激光與光電子學(xué)進(jìn)展, 2011, 48(04): 41-44.
[3]馬君國, 黃孟俊. 基于組合矩的激光成像雷達(dá)目標(biāo)識(shí)別算法[J]. 中國激光, 2012, 39(06): 200-204.
[4]于加其. 基于激光成像雷達(dá)距離像的地面目標(biāo)識(shí)別算法研究[D]. 北京理工大學(xué), 2015.
[5]孫劍峰, 李琦, 陸威, 王騏. 基于數(shù)字信號(hào)處理器的激光成像雷達(dá)目標(biāo)識(shí)別算法實(shí)現(xiàn)[J]. 中國激光, 2006(11): 1467-1471.
[6]張世征. 幾種輪廓曲率估計(jì)角點(diǎn)檢測算法研究[D]. 重慶大學(xué), 2016.
[7]陳繼華, 李響, 李棟. 一種改進(jìn)的輪廓曲線角點(diǎn)檢測方法[J]. 組合機(jī)床與自動(dòng)化加工技術(shù), 2016(07): 114-117+126.
[8]李云紅, 姚韻, 賈利娜. 基于圖像輪廓的角點(diǎn)檢測算法[J]. 計(jì)算機(jī)與數(shù)字工程, 2016, 44(10): 2015-2019.
[9]張倩. 基于輪廓的角點(diǎn)檢測算法研究[D]. 電子科技大學(xué), 2017.
[10]廖夢怡, 陳靚影, 徐如意, 等. 灰度值星型輻射投影角點(diǎn)檢測算法[J]. 計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào), 2018, 30(11): 2141-2149.
[11]Harris C J. A combined corner and edge detector[C]. Proceed-ings of 4th Alvey Vision Conference, 1988, (3): 147-151
[12]駱榮坤, 劉桂禮, 孔全存, 等. 基于四鄰域?qū)蔷€上灰度約束的亞像素角點(diǎn)檢測[J]. 計(jì)算機(jī)工程與設(shè)計(jì), 2019, 40(1): 77-83.
