目標(biāo)跟蹤技術(shù)研究?
2019-01-03 07:36:12
艦船電子工程 2018年12期
關(guān)鍵詞:模型
(北京西三環(huán)中路19號 北京 100841)
1 引言
雷達作為一種重要的目標(biāo)探測手段,以其全天時、全天候的使用特點,在現(xiàn)代軍事和民用領(lǐng)域扮演著重要的角色。自二戰(zhàn)時期美軍使用的第一部雷達以來,雷達便以驚人的速度向前發(fā)展,各類型雷達相繼面試,已逐漸被應(yīng)用于航海、航空、安防、海防以及軍事目標(biāo)探測等眾多領(lǐng)域中。隨著雷達技術(shù)的發(fā)展,雷達數(shù)據(jù)處理能力也提出了不斷升級的要求。雷達數(shù)據(jù)處理中最重要的步驟就是目標(biāo)跟蹤,目標(biāo)跟蹤技術(shù)是雷達數(shù)據(jù)處理的核心技術(shù),它利用雷達所獲取的運動目標(biāo)狀態(tài)信息,通過具體的濾波算法處理,從而獲得探測目標(biāo)的航跡信息。當(dāng)前世界軍事競爭形勢日趨激烈,隱身飛機的出現(xiàn)、高速/超高速導(dǎo)彈的增多、干擾技術(shù)手段的發(fā)展、目標(biāo)的高機動飛行、飛行姿態(tài)的多樣性變化等等,都給目標(biāo)跟蹤帶來了不小的困難,使其面臨著目標(biāo)易丟失或易跟錯等問題。因此,研究目標(biāo)跟蹤技術(shù)對提高雷達的目標(biāo)狀態(tài)估計精度以及對高速度、高機動目標(biāo)的跟蹤能力具有重要的意義。
目標(biāo)跟蹤[1]是運用跟蹤濾波算法盡可能地消除傳感器目標(biāo)量測值與實際值之間的差值,從而獲得目標(biāo)當(dāng)前的運動狀態(tài)估值并對下一時刻的運動狀態(tài)進行預(yù)測。目標(biāo)的運動狀態(tài)包括航向、航速、距離、位置、加速度等。目標(biāo)跟蹤過程中存在諸多不確定因素,這些因素直接影響著系統(tǒng)對目標(biāo)的跟蹤濾波精度。因此,目標(biāo)跟蹤系統(tǒng)必須適時地變化以適應(yīng)這些不確定因素發(fā)生的改變。雷達系統(tǒng)通過跟蹤濾波技術(shù),不斷減少不確定因素對系統(tǒng)造成的影響,持續(xù)對目標(biāo)狀態(tài)進行估計和預(yù)測,這也就是不同目標(biāo)跟蹤算法需要持續(xù)改進的原因。常用的目標(biāo)跟蹤算法包括四個部分:量測數(shù)據(jù)的預(yù)處理、目標(biāo)運動模型的建立、機動檢測與識別、濾波及預(yù)測。其中,目標(biāo)運動建模和濾波是目標(biāo)跟蹤過程中最主要的兩大問題[2]。目標(biāo)運動建模是對目標(biāo)不確定運動狀態(tài)的數(shù)學(xué)抽象,主要解決目標(biāo)處于何種運動狀態(tài)的問題。濾波是對目標(biāo)運動狀態(tài)參數(shù)的估計,估計結(jié)果的好壞直接影響目標(biāo)跟蹤精度。目標(biāo)跟蹤基本原理框圖如圖1所示。下面,本文分別對目標(biāo)跟蹤理論和多模型目標(biāo)跟蹤算法的國內(nèi)外研究進行歸納和總結(jié),希望能夠為國內(nèi)同行在目標(biāo)跟蹤領(lǐng)域的研究提供一些參考與幫助。
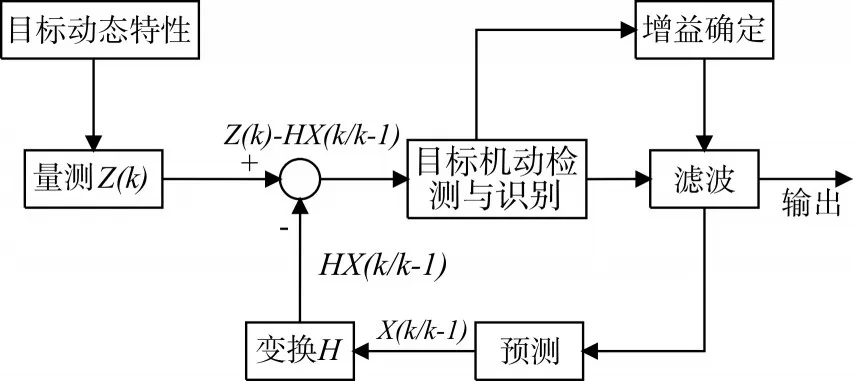
圖1 目標(biāo)跟蹤基本原理框圖
2 目標(biāo)跟蹤理論的研究現(xiàn)狀
2.1 目標(biāo)運動模型
目標(biāo)運動模型是目標(biāo)跟蹤中的重要方面,目標(biāo)模型的構(gòu)建要考慮目標(biāo)運動的特點,且要便于計算,從而提高跟蹤的實時性。目標(biāo)運動模型構(gòu)建的好壞,直接影響了目標(biāo)跟蹤系統(tǒng)的性能優(yōu)劣。通過幾十年的發(fā)展,各國的專家學(xué)者在這方面做了大量的研究,并形成了一系列的目標(biāo)運動模型。
目前,目標(biāo)跟蹤領(lǐng)域中最基本的模型分別為勻速(Constant Velocity,CV)模型[3]、勻加速(Constant Acceleration,CA)模型[3]和勻速轉(zhuǎn)彎(Coordinated Turn,CT)模型[3]。CV模型是用來描述目標(biāo)處于勻速運動時的數(shù)學(xué)模型,CA模型則可以實現(xiàn)描述目標(biāo)處于勻加速狀態(tài)時的數(shù)學(xué)模型。當(dāng)目標(biāo)以數(shù)值恒定的速率和角速度運動時,它在作轉(zhuǎn)彎運動,則此時可利用轉(zhuǎn)彎CT模型進行數(shù)學(xué)描述。它們的結(jié)構(gòu)比較簡單,但是在目標(biāo)跟蹤領(lǐng)域中的應(yīng)用卻是最多的,同時也為研究更高級的模型做了鋪墊。
由于上述模型只能用在目標(biāo)運動狀態(tài)沒有發(fā)生改變下的情形,一旦目標(biāo)的加速度狀態(tài)信息有了變化,或者當(dāng)目標(biāo)的運動狀態(tài)發(fā)生機動時,它們就與當(dāng)前狀態(tài)不會匹配,誤差將會變大。CV模型中的速度和CA模型中的加速度通常假設(shè)均服從均值為0的高斯白噪聲分布,但是這不符合實際情況。1970年,R.A.Singer提出的Singer模型[4]認為,機動模型是相關(guān)噪聲模型而不是白噪聲模型,而目標(biāo)加速度是具有指數(shù)自相關(guān)的零均值隨機過程。該模型用兩個量(加速度的方差和時間相關(guān)函數(shù))來描述目標(biāo)的一維機動,加速度的方差表示運動目標(biāo)的機動幅度,時間相關(guān)函數(shù)表示目標(biāo)機動的持續(xù)時間。
Singer模型仍具有一定的局限性,不能完全表征目標(biāo)的運動過程。為了更加貼近機動目標(biāo)的運動特性,擺脫Singer模型使用零均值的限制,多種改進模型隨之發(fā)展而來。半Markov模型是其中一個具有代表性的改進型,它將目標(biāo)機動的加速度或加速度變化率單獨分割出來,將其描述為一個隨機變量,相較于Singer模型多引入一個非零加速度,該非零加速度是由Markov過程的轉(zhuǎn)移概率確定的有限指令。當(dāng)運動目標(biāo)進行劇烈逃避機動時,一般模型的誤差都會變大,為解決這一問題Noval模型[5~6]引入了目標(biāo)機動的法向加速度,它也是一個時間相關(guān)過程。我國學(xué)者周宏仁教授于1983年提出了當(dāng)前統(tǒng)計(Current statistical,CS)模型[1,7],同Singer模型相比,Singer模型采用的是均值為0的高斯相關(guān)噪聲模型,而當(dāng)前統(tǒng)計模型采用的是非0均值的修正瑞利分布來描述加速度特性。這種分布的優(yōu)點是分布隨均值的變化而變化,方差由均值決定。因此,該算法不僅能夠估計目標(biāo)的運動狀態(tài),而且使得加速度的均值比較容易獲取,有利于對加速度的分布進行實時的修正。該模型具有兩個特點:通過運算得到的一個均值項來認為是“當(dāng)前”的運動加速度;同時將修正的瑞利分布來表示“當(dāng)前”運動加速度的概率密度函數(shù)。
為了更好地描述目標(biāo)的強機動運動,1997年Kishore Mehrotra等提出了Jerk模型[8]。此模型通過引入加速度變化率“Jerk”,并借鑒Singer模型的建模思想,將Singer模型中三維(位置、速度、加速度)狀態(tài)向量增加到四維(位置、速度、加速度、Jerk),其基本思想是認為目標(biāo)以某加速度變化率飛行時,下一刻的加速度變化率只能在當(dāng)時加速度變化率的基礎(chǔ)上擾動變化,且是非常有限的,即認為目標(biāo)的狀態(tài)分量加速度變化率是一階相關(guān)的穩(wěn)態(tài)馬爾科夫過程,其均值近似為零。目標(biāo)機動性的強弱采用相關(guān)時間的長短來表征:若時間相關(guān)時間值越小,表明目標(biāo)的機動性越強,即加速度變化率變化越快,當(dāng)時間相關(guān)時間值越大,表明目標(biāo)的機動性越弱。Jerk模型在跟蹤高速的復(fù)雜運動目標(biāo)時表現(xiàn)出良好的跟蹤精度,但計算復(fù)雜度較高,實時性較差。
2.2 濾波算法
早在1809年,高斯提出了一種最早的最優(yōu)濾波算法,即最小二乘法。盡管該算法的濾波性能并不高,但是它不要求先驗信息就可以運行,所以最小二乘法目前還廣泛用于某些領(lǐng)域中。20世紀(jì)40年代,控制論奠基人維納(Wiener)通過在頻域設(shè)計的Wiener濾波器在隨機平穩(wěn)過程系統(tǒng)下首先實現(xiàn)了線性最優(yōu)動態(tài)估計,完成了對包含多種信息的信號的抑制和選通。但是Wiener濾波器對信號的條件十分嚴格,它們一定得服從平穩(wěn)隨機過程,而且運算復(fù)雜度比較高同時還得非常大的內(nèi)存空間來存儲信息,因此Wiener濾波器并沒有被廣泛應(yīng)用。
1960年,R.E.Kalman為了解決阿波羅計劃的軌道預(yù)測,提出了Kalman(Kalman Filter,KF)濾波算法[9]。該算法適合計算機運算,因而快速發(fā)展,同Kalman濾波計算量小,實用性強等特點也讓其沿用至今,是目前應(yīng)用最廣泛的濾波算法之一。然而標(biāo)準(zhǔn)的Kalman的跟蹤精度很依賴數(shù)學(xué)模型,同時還需要已知目標(biāo)的狀態(tài)噪聲強度。另外,Kalman算法僅可以應(yīng)用于線性系統(tǒng)中,所以很多專家學(xué)者發(fā)現(xiàn)了許多相關(guān)改進的Kalman算法。
在接下來的很長時間里,Bucy等在KF理論的基礎(chǔ)上,研究了一種基于非線性系統(tǒng)和非線性觀測下的目標(biāo)跟蹤方法,即擴展卡爾曼濾波(Extended Kalman Filter,EKF)[10~11]。其主要思想是對非線性系統(tǒng)進行線性化處理,然后再按照標(biāo)準(zhǔn)的卡爾曼濾波方法來對系統(tǒng)狀態(tài)進行估計。然而EKF釆用的是高斯分布去逼近估計量的后驗分布,在強非線性情況下,存在著極大的線性化誤差,從而導(dǎo)致其估計性能較差。
20世紀(jì)90年代,牛津大學(xué)的Julier等人提出了無跡卡爾曼濾波(Unscented Kalman Filter,UKF)算法[12],UKF的主要思想是基于一種新的變換方法——Unscented變換(Unscented Transform,UT),UT是一種計算非線性變換中的隨機變量的統(tǒng)計特征的新方法,他用確定的釆樣對狀態(tài)的后驗分布進行近似,可以有效減少因非線性系統(tǒng)線性化而帶來的誤差,相比EKF,UKF在濾波性能上有很大改善。近幾年來,基于UKF的基本理論又出現(xiàn)了許多改進算法,其中包括基于平方根的無跡卡爾曼濾波算法(SRUKF)[13~14]、迭代無跡卡爾曼濾波算法(IUKF)[15]、高斯和無跡卡爾曼濾波算法[16]等,使得UKF及相關(guān)算法得到廣泛的應(yīng)用。由上述分析可知:濾波跟蹤算法慢慢開始由高斯向非高斯噪聲環(huán)境轉(zhuǎn)變,由線性向非線性系統(tǒng)下的濾波過程進行過渡。
鑒于EKF和UKF只適應(yīng)觀測方程為高斯的情況下,而在非高斯的情況下,其濾波誤差增大甚至?xí)?dǎo)致濾波發(fā)散,針對這個問題,Gordon等于20世紀(jì)90年代初在前人的基礎(chǔ)上提出了重要性重采樣(Sampling Importance Resampling,SIR)算法,這就是粒子濾波(Particle Filter,PF)算法[17,18],該算法是一種基于蒙特卡洛和貝葉斯估計理論的求解非線性系統(tǒng)問題的最優(yōu)算法。PF算法通過尋找一組在狀態(tài)空間中傳播的隨機粒子來近似表示狀態(tài)向量的后驗概率密度,利用粒子均值來代替積分運算,并且以遞歸的方式對量測數(shù)據(jù)進行序貫處理,不需要對前的量測數(shù)據(jù)進行保存和再處理,有利于減小存儲空間。PF算法跟蹤精度較高,但是需要數(shù)量眾多的采樣點,計算量大,且容易產(chǎn)生濾波發(fā)散以及粒子退化等問題。針對粒子退化問題,近年來許多學(xué)者做了大量研究,并提出了許多改進算法,其中包括,殘差系統(tǒng)重采樣算法(Residual Systematic Resampling,RSR)[19]、高斯粒子濾波算法[20]、自適應(yīng)粒子濾波算法[21]。
3 基于多模型的跟蹤算法研究現(xiàn)狀
目標(biāo)跟蹤算法可分為單模型跟蹤算法和多模型跟蹤算法。單模型算法主要基于KF濾波器以及其它改進算法與單一的運動模型進行組合使用。近年來,許多學(xué)者都通過對單模型跟蹤算法的研究提出了自己的方法[22~24]。但是,隨著技術(shù)的發(fā)展和目標(biāo)機動性的增強,目標(biāo)的運動越來越呈現(xiàn)出機動性的特點。單模型在跟蹤此類目標(biāo)時,常常會因為運動模型不匹配,造成跟蹤誤差過大,甚至目標(biāo)丟失等問題。
1965年,D.T.Magill針對單運動模型跟蹤中存在的問題,提出了多模型(Multiple Model,MM)算法[25],MM算法使用固定個數(shù)的運動模型,各運動模型通過各自的濾波器并行工作,各濾波器之間沒有交互,最后將每個濾波器的輸出結(jié)果按照一定的權(quán)值輸出。該算法克服了使用單一運動模型匹配目標(biāo)運動不夠精確的問題,缺點是未考慮到模型之間的切換及交互的問題。
為了解決MM算法各濾波器間不能交互的問題,Bar Shalom等在20世紀(jì)70年代在多模型的基礎(chǔ)上提出了交互式多模型(Interacting Multiple Model,IMM)算法[26],該算法考慮到了運動模型之間的跳變,同時使用多種運動模型跟蹤目掠運動,并使用馬爾科夫矩陣進行模型之間的切換,最后將濾波的結(jié)果加權(quán)輸出。IMM算法計算量與一階廣義偽貝葉斯(First Order Generalized Pseudo Bayesian,GPB1)算法基本相當(dāng),性能卻接近于二階廣義偽貝葉斯(Second Order Generalized Pseudo Bayesian,GPB2)算法。IMM算法憑借著良好的性能己經(jīng)在目標(biāo)跟蹤領(lǐng)域得到了廣泛應(yīng)用。
IMM算法若要使目標(biāo)跟蹤更精確,則需要匹配更多的運動模型,這會導(dǎo)致計算量的加大。模型數(shù)量和計算量之間達到平衡也是研究的重點。X.R.Li等在20世紀(jì)90年代提出了變結(jié)構(gòu)以及模型集的MM 算法[27~28]。W.D.Blair和 D.Kazakos提出了一種二階的IMM算法[29],該算法需要考慮過去兩個采樣時間間隔內(nèi)的歷史,每個模型的估計都由不同的先驗條件下的估計組合而成。
目前改進IMM算法的研究主要集中在兩個方面:一是變結(jié)構(gòu)多模型算法[30~32],是使用時變的模型集代替固定的模型集的IMM算法,適用于解決結(jié)構(gòu)和參數(shù)未知的估計問題,但是變結(jié)構(gòu)多模型算法存在著計算量大、結(jié)構(gòu)復(fù)雜、缺乏統(tǒng)一的標(biāo)準(zhǔn)等缺點。二是自適應(yīng)多模型算法[33~35],這些算法根據(jù)目標(biāo)的實際運動情況自適應(yīng)的進行參數(shù)的調(diào)整,適用于機動目標(biāo)跟蹤的情況。
4 結(jié)語
結(jié)合目標(biāo)跟蹤技術(shù)的國內(nèi)外研究現(xiàn)狀,下一步的研究重點從以下及各方面考慮:
1)現(xiàn)有的目標(biāo)運動模型還比較老舊,還不能完全描述當(dāng)前高機動目標(biāo)的運動特性,在這方面有待進一步研究;
2)現(xiàn)有的濾波算法也只是基于較早的經(jīng)典濾波算法如EKF算法、UKF算法、PF算法等針對特定問題做了些許改進,沒有本質(zhì)上解決當(dāng)前的目標(biāo)狀態(tài)估計問題;
3)現(xiàn)有的多模型跟蹤算法研究可以考慮利用深度學(xué)習(xí)等人工智能算法估計出目標(biāo)的運動模型,做到多個運動模型之間的自適應(yīng)切換,從而滿足目標(biāo)高機動跟蹤要求;
4)現(xiàn)有目標(biāo)跟蹤研究還大多建立在數(shù)字仿真的基礎(chǔ)上,對于實測數(shù)據(jù)驗證方面還有待進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
