電子戰(zhàn)無人機(jī)對警戒雷達(dá)雙機(jī)干擾的路徑規(guī)劃研究?
2019-01-03 07:36:14汪宏宇李仙茂甘厚吉陳
艦船電子工程 2018年12期
關(guān)鍵詞:規(guī)劃
汪宏宇李仙茂甘厚吉陳 德
(1.31433部隊(duì) 沈陽 110034)(2.海軍工程大學(xué)電子工程學(xué)院 武漢 430033)
1 引言
無人機(jī)具有隱蔽性,無人員傷亡,低成本,起降條件低等優(yōu)點(diǎn),使其在現(xiàn)代戰(zhàn)爭中得到廣泛的應(yīng)用[1~2]。無人機(jī)海戰(zhàn)場的作戰(zhàn)運(yùn)用由來已久,并且越來越重要。電子戰(zhàn)無人機(jī)在海上作戰(zhàn)中的對海作戰(zhàn)、對岸作戰(zhàn)可起到了重要的作用[3]。在對岸作戰(zhàn)中,艦載機(jī)實(shí)施突防作戰(zhàn)時(shí),面臨敵方警戒雷達(dá)的威脅。針對敵方岸基警戒雷達(dá)對突防戰(zhàn)機(jī)的威脅,需要研究怎樣運(yùn)用雷達(dá)干擾無人機(jī)對岸基警戒雷達(dá)進(jìn)行干擾,特別是干擾運(yùn)用過程的航線規(guī)劃問題[4~5],以滿足空中編隊(duì)突防的需要。本文研究兩架艦載電子戰(zhàn)無人機(jī)協(xié)同對岸基搜索警戒雷達(dá)進(jìn)行干擾,以掩護(hù)對岸作戰(zhàn)中作戰(zhàn)飛機(jī)突防。在雙機(jī)干擾運(yùn)用的過程中,無人機(jī)的路徑規(guī)劃尤為重要,本文重點(diǎn)研究雙無人機(jī)對岸基警戒雷達(dá)干擾過程中的航路規(guī)劃。
2 無人機(jī)干擾的有效干擾扇面
有效干擾扇面是指在最小干擾距離上干擾應(yīng)能壓制的信號扇面,在此扇面內(nèi)雷達(dá)完全不能發(fā)現(xiàn)目標(biāo)。無人機(jī)干擾雷達(dá)時(shí),單架無人機(jī)形成的干擾扇面,是指雷達(dá)到無人機(jī)的連線相對雷達(dá)形成的掩護(hù)扇面角。
2.1 單無機(jī)干擾的有效干擾扇面
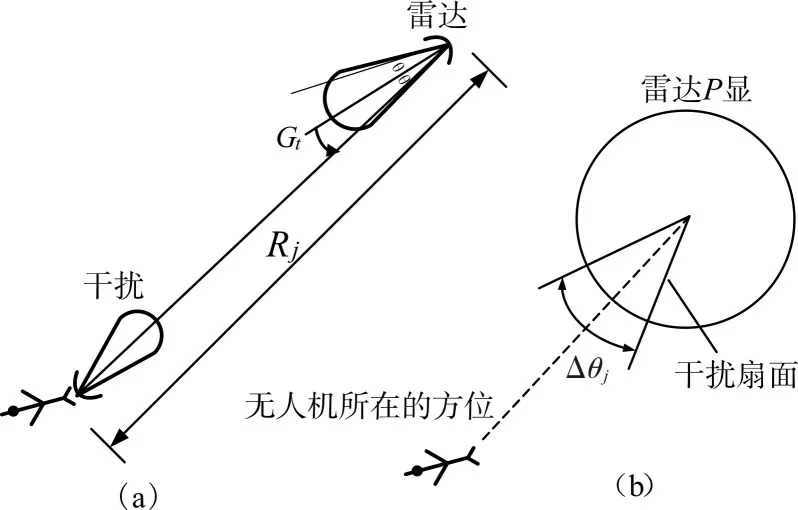
圖1 無人機(jī)雷達(dá)有效干擾扇面
這時(shí),接收機(jī)輸入端的干擾信號功率應(yīng)滿足[6]:

式中:Prj雷達(dá)接收到的干擾功率;Kj為端外壓制系統(tǒng);Prs為雷達(dá)接收到的目標(biāo)回波信號功率。
有效干擾扇面Δθj的關(guān)系式為[7]

式中:PjGj為等效雷達(dá)功率;PtGt為等效干擾功率;σ為目標(biāo)有效反射面積;Rt為被掩護(hù)飛機(jī)至雷達(dá)的斜距;Rj為無人機(jī)至雷達(dá)的斜距;γj為干擾信號對雷達(dá)天線的極化系統(tǒng),取γj=0.5;θ0.5為雷達(dá)天線半功率波束寬度;K為系數(shù)取0.04~0.10。
2.2 雙無機(jī)干擾的有效干擾扇面
無人機(jī)與雷達(dá)的直線距離為Rj,水平距離為Dj,無人機(jī)飛行高度為Hj;突防飛機(jī)與雷達(dá)直線距離為Rt,水平距離為Dt,突防飛行高度為Ht。實(shí)施抵近干擾時(shí),有效干擾扇面跟突防目的、干擾機(jī)的配置方式和雷達(dá)密切相關(guān)。有效干擾扇面覆蓋角度為[8]
取θ=Δθj,此時(shí)可形成最大的有效干擾扇面(區(qū)域)。當(dāng)兩架無人機(jī)的相對位置配置達(dá)到最佳時(shí),雙無人機(jī)的有效干擾扇面可以是單無人機(jī)的兩倍[9~10]。可以求得此時(shí)兩機(jī)之間的間距d的最大值:

3 雙無人機(jī)側(cè)向干擾
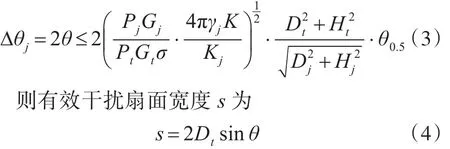
當(dāng)干擾無人機(jī)為側(cè)向干擾時(shí),一側(cè)的干擾覆蓋角度約為120o,這就要求干擾無人機(jī)側(cè)向?qū)?zhǔn)警戒雷達(dá)才能實(shí)施有效干擾。此時(shí),無人機(jī)的干擾波束掃描中心在無人機(jī)機(jī)身正側(cè)向,朝左或朝右,干擾路徑規(guī)劃中,應(yīng)將路徑中的直道設(shè)置為接近垂直于無人機(jī)與受干擾雷達(dá)之間的連線,如圖2所示。
無人機(jī)的干擾路徑選擇用跑道形,跑道直邊邊長為Dr。兩無人機(jī)之間的間距d一般只有幾公里,相對較近,可以考慮將兩架無人機(jī)布置在同一跑道上進(jìn)行干擾,如圖2所示。
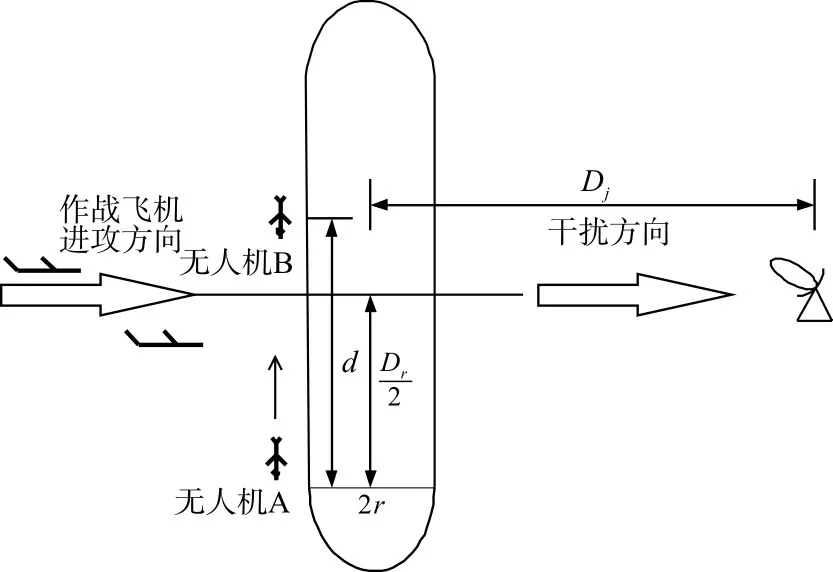
圖2 雙無人機(jī)干擾跑道規(guī)劃示意圖
從圖2可以得出干擾無人機(jī)跑道的限制條件。
1)兩架無人機(jī)不可同時(shí)處于同一轉(zhuǎn)彎弧線(變道中)中,即dmax≥πr。
2)兩架無人機(jī)不可同時(shí)處于兩個(gè)轉(zhuǎn)彎弧線(變道中)中,即 Dr≥dmax。
3)兩架無人機(jī)不可同時(shí)處于直線軌道的同一半范圍,否則意味著干擾角度穩(wěn)定覆蓋范圍太小,即Dr≤2dmax。
結(jié)合以上3項(xiàng)限制條件,如下:

無人機(jī)跑道Dr的設(shè)軒與無人機(jī)到雷達(dá)的距離有關(guān)。結(jié)合式(3)和式(5),兩架無人機(jī)采用相同的參數(shù),利用Matlab仿真,結(jié)果如圖3所示。
由圖3可知,干擾無人機(jī)與雷達(dá)的水平距離越遠(yuǎn),無人機(jī)干擾跑道的直線距離Dr也越大,但是Dr的變化不明顯。結(jié)合圖2給出的作戰(zhàn)場景,當(dāng)無人機(jī)起飛提前2min到達(dá)指定干擾區(qū)域后,以一前一后、相距dmax的隊(duì)形在同一跑道上實(shí)施干擾,當(dāng)無人機(jī)布置在距警戒雷達(dá)20km處時(shí),無人機(jī)的干擾跑道的直線跑道距離Drmax≤5.534km,設(shè)彎道半徑r為0.5km。
圖3 無人機(jī)干擾跑道Dr與水平距離Dj的關(guān)系示意圖
為計(jì)算無人機(jī)運(yùn)動,建立坐標(biāo)系如圖3所示。
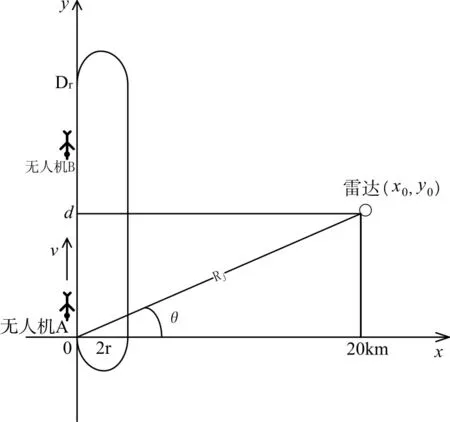
圖4 無人機(jī)運(yùn)動坐標(biāo)系
對于無人機(jī)A,假設(shè)運(yùn)動時(shí)間為t,t T的余數(shù)為t0,跑道周長s0=2πr+2Dr其運(yùn)動坐標(biāo)有以下幾種情況:
1)當(dāng) 0≤t0≤Dr·T/s0時(shí),x=0,y=vt0;
2)當(dāng) Dr·T/s0<t0<(Dr+πr)/s0·T 時(shí),無人機(jī)在彎道上,對雷達(dá)沒有干擾作用,所以此時(shí)的干擾扇面 Δθj=0;
3)當(dāng) (Dr+πr)/s0·T≤t0≤(2 Dr+πr)/s0·T 時(shí) ,x=2r,y=Dr-vt0;
4)當(dāng) (2 Dr+πr)/s0·T<t0<T 時(shí),同2)。
兩無人機(jī)間距的飛行時(shí)間為tj=d/v,對于無人機(jī)B,對(t+tj)T取余為t1,其運(yùn)動坐標(biāo)有以下幾種情況:
1)當(dāng)0≤t1≤Dr·T/s0時(shí),x=0,y=vt1;
2)當(dāng) Dr·T/s0≤t1≤(Dr+πr)/s0·T 時(shí),無人機(jī)處于彎道,Δθj=0;
3)當(dāng) (Dr+πr)/s0·T≤t1≤(2 Dr+πr)/s0·T 時(shí) ,x=2r,y=Dr-vt1;
4)當(dāng) (2 Dr+πr)/s0·T<t1<T 時(shí),同2)。
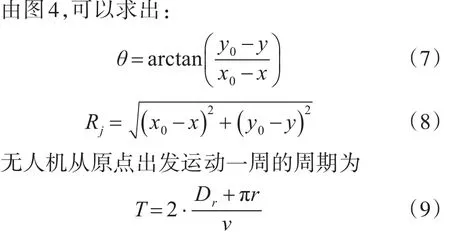
結(jié)合有效干擾扇面的計(jì)算公式(3)仿真計(jì)算可以得到無人機(jī)的有效干擾區(qū),如圖5所示。
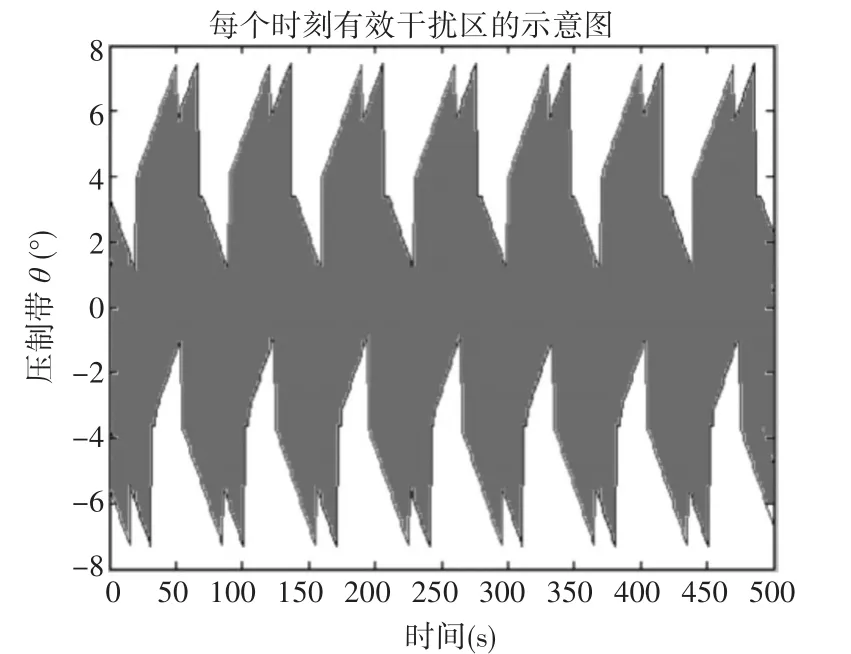
圖5 側(cè)向干擾的干擾帶示意圖
如圖5所示,是兩架無人機(jī)對于雷達(dá)形成干擾帶的疊加,當(dāng)其中一架無人機(jī)在轉(zhuǎn)向時(shí),其對雷達(dá)無干擾作用即沒有干擾帶,此時(shí)另一架無人機(jī)對雷達(dá)還在繼續(xù)干擾,形成一條干擾帶,保證同一時(shí)刻最多只有一架無人機(jī)在轉(zhuǎn)向。對應(yīng)時(shí)刻在帶狀里面的就是兩架無人機(jī)疊加形成的有效干擾區(qū),由圖可以看出在不同時(shí)刻兩架無人機(jī)掩護(hù)的角度是不同的,都是以達(dá)到掩護(hù)突防編隊(duì)在0°左右不被發(fā)現(xiàn)和鎖定為目的。
4 雙無人機(jī)前后向干擾
當(dāng)干擾無人機(jī)為前向干擾時(shí),干擾機(jī)的干擾波束分布無人機(jī)機(jī)身軸向朝前或朝后,一向的干擾覆蓋角度約為60o,這就要求干擾無人機(jī)前向或后向?qū)?zhǔn)警戒雷達(dá)才能實(shí)施有效干擾,所以無人機(jī)的干擾路徑選擇采用跑道形,跑道直邊邊長為Dr。此時(shí),無人機(jī)的干擾波束掃描中心在無人機(jī)機(jī)身軸向,干擾路徑規(guī)劃中,應(yīng)將路徑中的直道設(shè)置為接近平行于無人機(jī)與受干擾雷達(dá)之間的連線[11]。
設(shè)作戰(zhàn)飛機(jī)編隊(duì)在距警戒雷達(dá)600km的位置,要求干擾無人機(jī)以最快的速度達(dá)到干擾效果以掩護(hù)作戰(zhàn)飛機(jī)的突防,保證突防機(jī)群在50km以外不被敵方警戒雷達(dá)發(fā)現(xiàn)。根據(jù)前面給出的限制條件,即無人機(jī)的控制距離最大為200km,所以干擾無人機(jī)平臺(艦艇)應(yīng)機(jī)動到距對方警戒雷達(dá)200km的位置,然后放飛干擾無人機(jī)到最佳干擾位置。
因?yàn)椋瑹o人機(jī)是前后向干擾,只能頭部或者尾部對準(zhǔn)雷達(dá)實(shí)施干擾[12]。綜合前面的仿真計(jì)算和參數(shù)的設(shè)定,以及參考文獻(xiàn)[11]得到干擾無人機(jī)的轉(zhuǎn)彎半徑r可取500m,可以得到以下作戰(zhàn)場景下無人機(jī)實(shí)施有效干擾的路徑規(guī)劃如圖6所示。
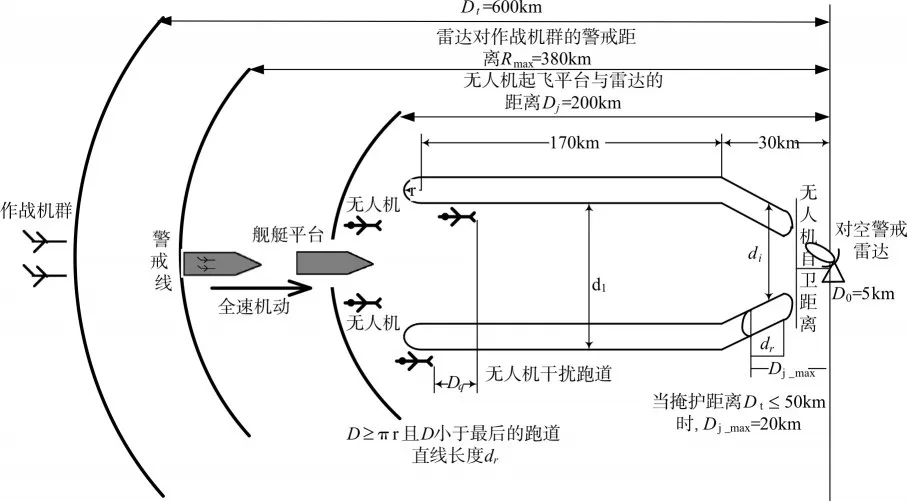
圖6 無人機(jī)是前向和后向干擾時(shí)的路徑規(guī)劃
根據(jù)式(3),對圖7的對暴露區(qū)進(jìn)行仿真計(jì)算,可以得出干擾距離 Dj為200km, ||θ ≤θ0.5/2時(shí),無人機(jī)完全能夠掩護(hù)380km處的作戰(zhàn)機(jī)群,如圖7所示。因此在200km處起飛的無人機(jī)可以立即開機(jī)實(shí)施干擾掩護(hù)600km處起飛的作戰(zhàn)機(jī)群,讓其盡快的切入戰(zhàn)場實(shí)現(xiàn)突防。
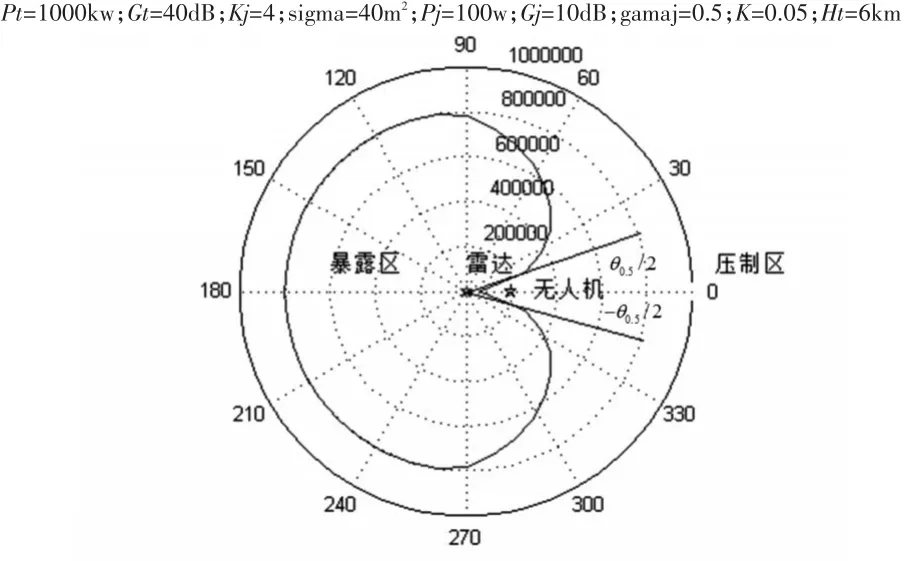
圖7 干擾距離Dj為200km時(shí)的暴露區(qū)
無人機(jī)起飛后立即開干擾機(jī),根據(jù)圖5場景仿真,可以得出當(dāng)無人機(jī)與雷達(dá)的距離Dj大于30km時(shí),d1=2.48km≤dmax;當(dāng)Dj小于30km但大于無人機(jī)自衛(wèi)距離時(shí),為了飛行方便無人機(jī)的間距呈線性變化以滿足掩護(hù)距離Dt為50km時(shí)有效干擾扇面最大的要求,如圖7所示。
由圖8可知,想要掩護(hù)作戰(zhàn)機(jī)群突防到50km,且滿足干擾扇面要求s=6km,那么干擾無人機(jī)的最大配置距離Dj約為20km。無人機(jī)的自衛(wèi)距離約為5km,因此無人機(jī)想要滿足干擾要求就必須在5km~20km的范圍內(nèi)進(jìn)行干擾。以500m為轉(zhuǎn)彎半徑,在轉(zhuǎn)彎過程中無人機(jī)對雷達(dá)處于非干擾狀態(tài),要保證全時(shí)干擾兩架無人機(jī)就必須在時(shí)間上達(dá)到互補(bǔ)的目的,因此不難得出無人機(jī)的前后間距Dq要滿足 πr≤Dq≤Dr。
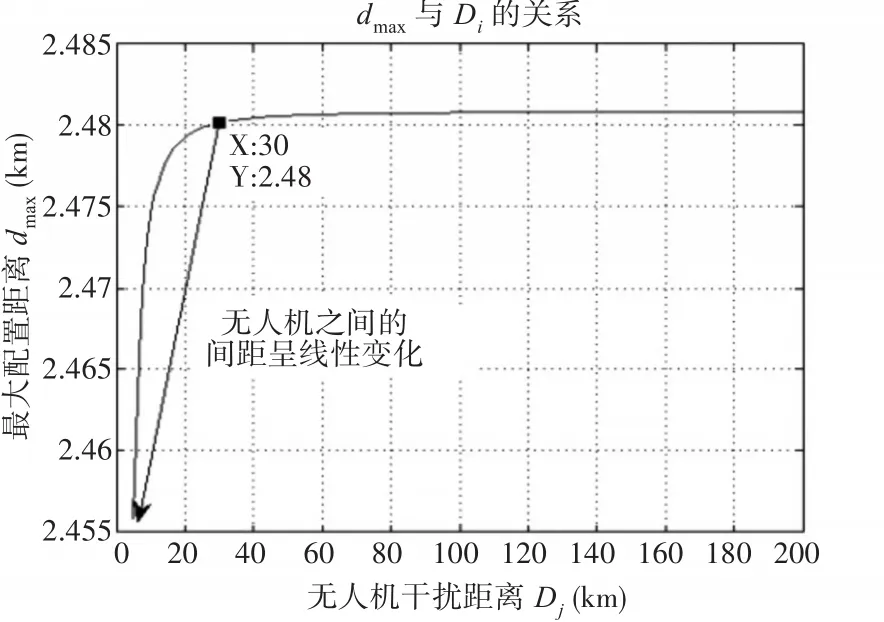
圖8 無人機(jī)配置距離示意圖
由于兩架無人機(jī)的間距di變化較小,所以在最后的干擾跑道上取di(滿足最大距離的要求)為定量進(jìn)行仿真計(jì)算。建立坐標(biāo)系如圖9所示。
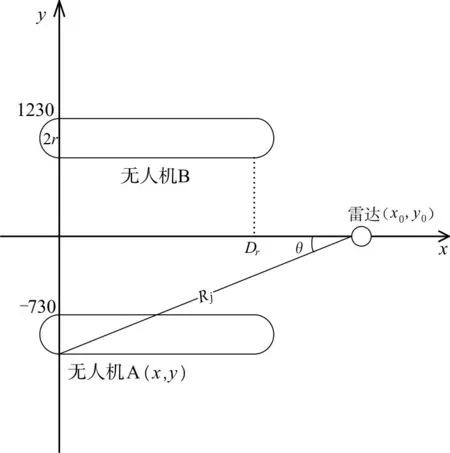
圖9 無人機(jī)前后干擾坐標(biāo)系
分析和計(jì)算思路同側(cè)向干擾飛行跑道的仿真方法,得到無人機(jī)的有效干擾區(qū)如圖10所示。
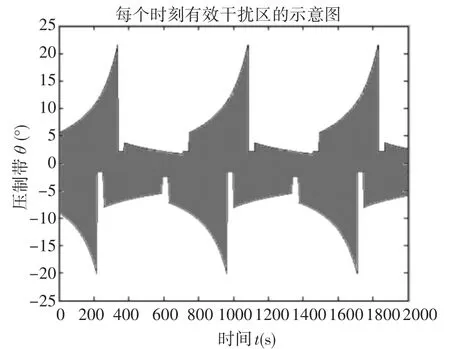
圖10 前后向干擾的干擾帶示意圖
如圖10可知,在帶狀內(nèi)部的都表示有效干擾區(qū),下邊沿是其中一架雷達(dá)干擾無人機(jī)形成的干擾帶的一個(gè)邊,凹進(jìn)去的一段時(shí)間是無人機(jī)處于轉(zhuǎn)向時(shí),為確保對雷達(dá)形成不間斷的干擾,兩架無人機(jī)不能同時(shí)處于轉(zhuǎn)向狀態(tài)(彎道),如圖9所示上下凹陷區(qū)域需要錯(cuò)開。零度方位在整個(gè)時(shí)間段基本都是干擾壓制區(qū),因此突防飛機(jī)可以選擇從零度方位進(jìn)行突防,但是考慮到敵方的打擊概率,因此在飛行過程中應(yīng)該適當(dāng)機(jī)動前進(jìn),根據(jù)每個(gè)時(shí)刻的壓制區(qū)做出在角度上的變化。
5 結(jié)語
綜合兩種干擾方式的干擾壓制區(qū)對比,側(cè)向干擾對無人機(jī)飛行控制要求較低。前后向干擾的干擾壓制區(qū)覆蓋角度較穩(wěn)定,更有利于無人機(jī)逐漸抵近雷達(dá)干擾,更有利于作戰(zhàn)飛機(jī)的突防。
本文研究了兩架無人機(jī)為掩護(hù)突防機(jī)群而對一部岸基警戒雷達(dá)進(jìn)行干擾的規(guī)劃問題,給出了干擾無人機(jī)實(shí)施前后向干擾和側(cè)向干擾時(shí)的規(guī)劃方法,得出了兩種情況下干擾無人機(jī)的干擾詳細(xì)航路,雖然只對一部雷達(dá)進(jìn)行了詳細(xì)的研究,對于多個(gè)雷達(dá)的干擾只需干擾無人機(jī)采用分布式的干擾方式,其他的思路和算法基本一致。進(jìn)一步的研究可以針對邊轉(zhuǎn)彎邊干擾的情況進(jìn)行研究,可進(jìn)一步提高干擾的時(shí)間覆蓋率。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
