三維激光掃描和全站儀結合的建筑物立面測量方法研究與工程實踐
2019-01-03 09:07:58曾攀立劉傳逢李翅童欣王龍馳夏寅
城市勘測 2018年6期
曾攀立,劉傳逢,李翅,童欣,王龍馳,夏寅
(武漢市測繪研究院,湖北 武漢 430022)
1 引 言
城市快節奏發展,智慧城市的建設已到來。隨著智慧城市概念的提出,城市三維模型的構造、獲取建筑物立面信息顯得愈發重要,尤其是在研究建筑物日照時間、古建筑的保護、建筑物美化和擴建、異形建筑物的核實面積測量、大型土木工程、立體量測、變形監測等領域[1]。
傳統建筑物立面測量方法是利用全站儀獲取建筑物的三維點坐標,結合卷尺及測距儀量取建筑物的細部尺寸,繪制測量略圖,然后將測量數據進行格式轉換,在測繪軟件中展點繪圖,依照外業現場繪制的草圖構建建筑物平立面圖。這種方法原理簡單,但是工作量大,需要投入大量工作人員,消耗時間長,效率低下,且越是復雜異性的建筑物精度越低[2~6]。而三維激光掃描技術是一種非接觸主動測量全自動高精度立體掃描技術,通過高速激光掃描測量方法,以點云的方式獲取建筑物表面采樣點的三維坐標,彌補了傳統測量方法的局限性、高效快速、簡單精確、實時主動、信息豐富,但是三維掃描技術有效測量距離有限,容易受到周邊環境的影響,在掃描的時候,容易把周圍的樹、電線、花壇、車輛、行人等附屬物體一起掃描,摻雜在點云數據里面,影響數據精度[7]。為此,本文綜合利用兩種方法的優缺點,提出了三維激光掃描和全站儀結合的建筑物立面測量方法,以三維激光掃描技術得到的點云數據作為基礎,全站儀免棱鏡測距技術所測得的數據即可以作為缺失部分點云數據的補充,也可以作為部分建筑物表面點云數據的核實,實現建筑物立面測量。
2 建筑物立面測量方法
2.1 測量方法
三維激光掃描技術用來獲取建筑物整體點云數據,點云數據的后處理使用與硬件配套的點云數據處理軟件Cyclone 9.1,建筑物平立面圖的繪制及面積計算使用AutoCAD軟件。整個點云數據后處理過程包括點云拼接、坐標系歸一化、點云去噪、點云合并、點云切割及平立面圖繪制等幾個流程。當被測物周圍有過多的雜物,如與鄰棟建筑間隔太近、門窗被樹木遮擋、墻體周圍有花壇等綠化、建筑物上方有較多電線穿過、鬧市街區行人較多等因素會直接影響點云數據的精確度和完整性。為此可采用全站儀免棱鏡測距技術進行數據采集,在適當位置設站,測量局部位置的三維坐標,通過全站儀測量坐標轉換方法轉換成二維坐標投影到立面圖上,實現建筑物立面測量。其作業流程如圖1所示。
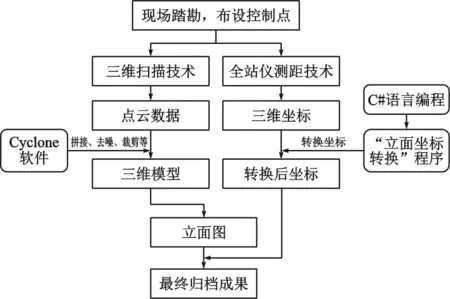
圖1 作業流程
2.2 坐標轉換
利用全站儀免棱鏡測距技術進行立面測量一般測量的是三維坐標,史經[8]等提出了一種全站儀編碼法實現建筑物立面測量,該方法通過一定的編碼規則,將采集的三維坐標轉換為距離和高程組成的二維坐標,再通過自動展點程序直觀地顯示正射投影的立面圖。但該方法需要在外業測量架設全站儀時事先確定立面基點和方向點,且必須嚴格按照編碼規則在測量每一特征點時根據該特征點是在立面基點的右側還是左側來確定編碼中該點的正負號。本文提出了一種無須在外業測量時確定立面基點和方向點的全站儀測量坐標轉換方法。該方法可以在內業測量數據處理時進行,且立面基點和方向點的確定可以在數據處理過程中多次選擇不同的組合,最終選擇誤差最小的一對。另外,該方法無須額外制定編碼規則,降低了數據采集人員的操作成本。
如圖2所示,O-XYZ為絕對坐標系。在某一建筑立面上,分別在立面左右兩端選取兩個測量特征點A和B。根據測量繪圖時自左向右的習慣,可以將A點叫作立面基點,B點叫作立面方向點。根據立體幾何原理可知,通過A、B兩點可以唯一確定一個垂直于平面YOZ平面的面W。立面數據轉換的目的就是將所有該立面的測量特征點坐標數據投影到W垂面上,也即W面為立面投影面。為了降低計算誤差,A、B兩點的間距應當盡可能大些。
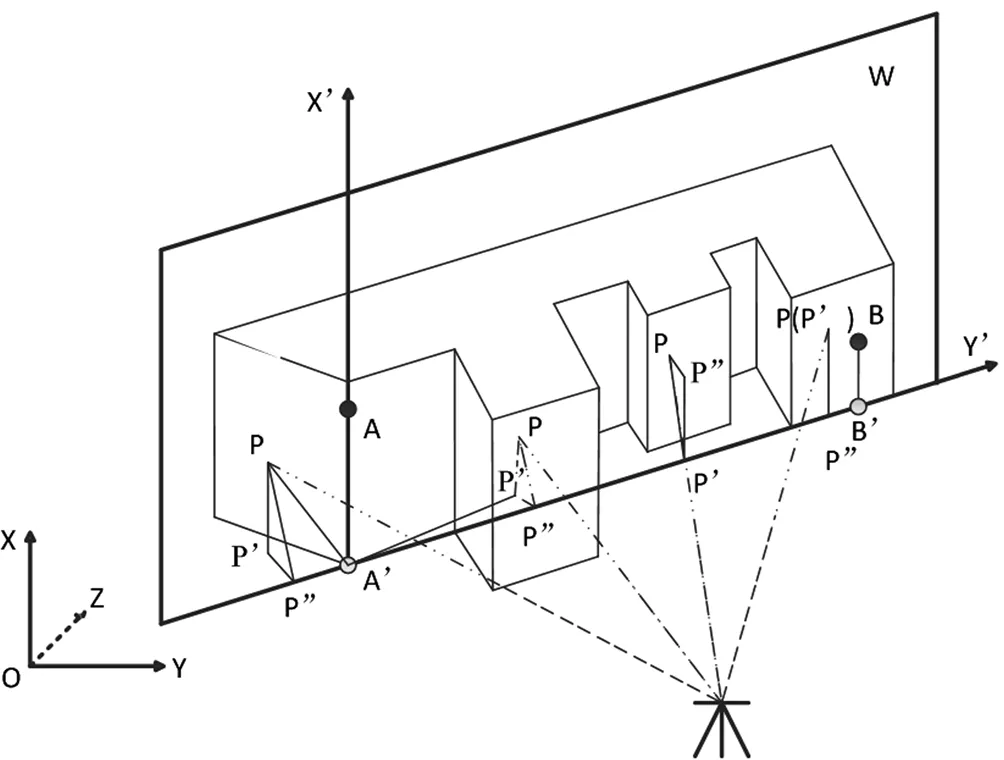
圖2 坐標轉換
分別作A、B兩點在YOZ平面平面上的投影點A′、B′。由A′、B′可以確定一條直線,設直線方程為:
Ax+By+C=0
(1)
設P(xp,yp,zp)點為建筑立面上的某一已知測量點,P′(xp′,yp′,zp)為P點在YOZ平面上的投影點。過P′點作直線A′B′的垂線,交A′B′于點P″。根據點到直線的距離公式可得P′P″的長度為:
(2)
又因為投影之后P′點的橫縱坐標與P點相等,所以
(3)
根據兩點間的距離公式可得P′點到A′點的距離為:
(4)
根據勾股定理可得:
(5)
由圖1可以看出,P點高程測量值h=zp,P″在直角坐標系XAY中的坐標值為(XP″,YP″),XP″=zp,YP″=A′P″,通過P′A在豎向投影線X的左右兩側來判斷P′A值的正負,左為“-”,右為“+”。
3 工程實踐及分析
以武漢地產開發投資集團有限公司(東湖綠道二期驛站及公共廁所改造)現狀建筑平立剖復原測量項目為例,本文采用三維激光掃描和全站儀結合的建筑物立面測量方法進行建筑物立面測量。整項工作分為內業外業兩部分:外業作業方法采用三維激光掃描儀及全站儀進行外業數據采集;內業配合Cyclone軟件對點云數據進行拼接、裁切、量測等操作,使用C#語言編寫“立面坐標轉換”程序,處理三維坐標,最后采用CAD編繪成圖。
3.1 外業測量
現場踏勘時,拍攝照片,記錄周邊環境,提前設計最佳掃描路線、選取設站和標靶位置。三維掃描采用徠卡Nova MS60全站掃描儀,該方法的優點是掃描得到的點云數據無須手動拼接。掃描步驟大致分為儀器安置、儀器參數設置、開始掃描、換站掃描等幾個過程。對某建筑物外業數據的采集工作耗時 1.5 h,共架設8站,獲取到包括測區全部區域在內的73萬個三維點。
由于測區客觀因素復雜,樹木、電線、沙堆等干擾遮擋嚴重,或者建筑物表面材料對激光的反射和吸收,導致建筑物表面的一些地物特征不明顯,點云數據缺失或者不精確,三維模型圖甚至有些能明顯看出是不完整的,因此還需要全站儀測量來作為輔助。使用徠卡TM50全站儀的免棱鏡測量功能獲取缺失部分的三維坐標,精度完全符合本次測量工作要求。免棱鏡測量技術不需要工作人員手持棱鏡,選點靈活,特別是可以在建筑物特征點多、比較隱蔽,三維激光掃描儀無法測量的位置進行工作,如門窗、屋面凸凹線,樓梯、欄桿以及被遮擋嚴重的要素等。
3.2 內業數據處理
點云數據后處理過程包括點云拼接、坐標系歸一化、點云去噪、點云合并、點云切割及平立面圖繪制等幾個流程。軟件的自動拼接報告中,拼站的精度都在mm級別,能夠滿足整體測區拼站后的精度要求。同時,軟件可對點云數據進行剖面裁切,方便地物特征性的提取。如圖3所示為徠卡MS60三維掃描儀掃描得到的整體點云數據。

圖3 某建筑物點云數據
全站儀測量的三維坐標點,無法直接進行展繪,需要通過坐標轉換使每個立面測點坐標相對獨立,程序需要實現三維坐標轉換成二維坐標的功能。本文采用C#語言編寫了自動處理坐標轉換的工具,如圖4所示。該工具操作簡單,快速高效,只需將存儲了三維坐標的文本文件導入到工具中,即可一鍵實現坐標轉換。圖5為將轉換后的坐標在CAD中展點連線得到的局部立面圖。
結合以上兩種方法最終得到的建筑物四個立面圖如圖6所示。
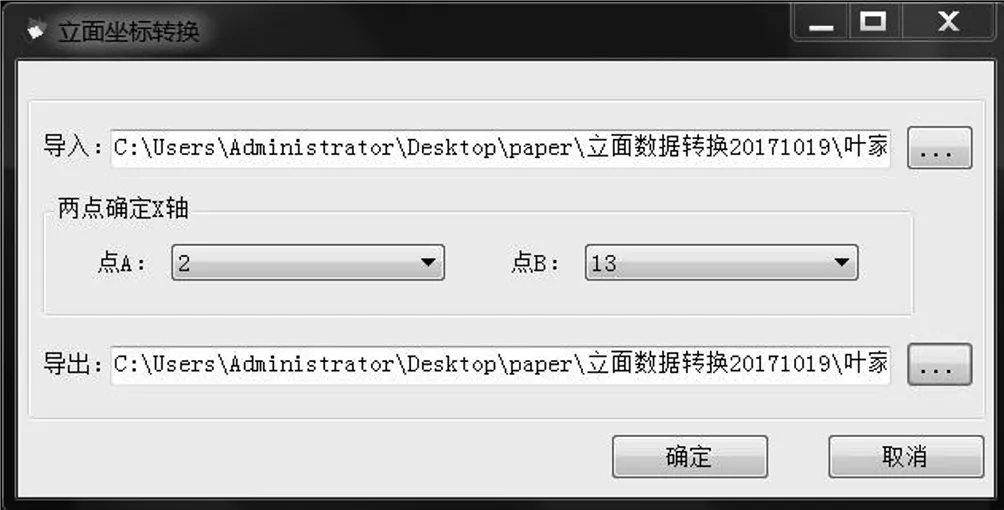
圖4 立面坐標轉換過程

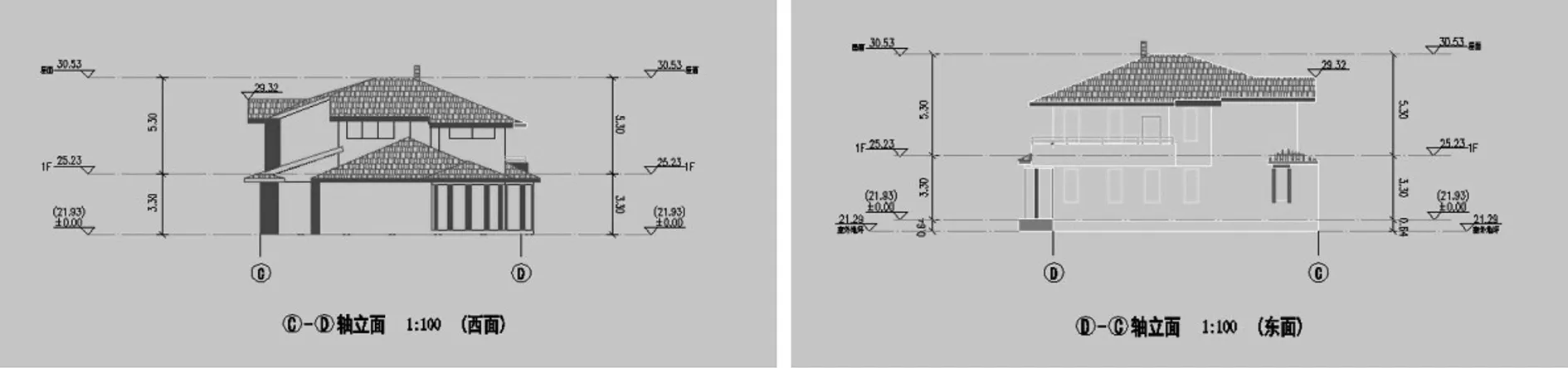
圖6 立面圖成果
以多站點掃描得到的點云數據為基礎,在3ds Max軟件中,遵循點云數據的空間結構特征規律,先在某一明顯特征點建立XY、YZ或者XZ方向的參考面,參照上述得到的建筑物立面圖,構建建筑物的三維基礎模型,如圖7所示。

圖7 建筑物三維模型
4 結論與展望
實踐表明:本文提出的三維激光掃描和全站儀結合的建筑物立面測量方法,可以彌補傳統測繪手段和新興測繪手段各自的不足,三維激光掃描技術主要用于獲取高精度點云數據、建筑物平面、立面、剖面測量和三維模型重建,它測量精度高、采集速度快,結合全站儀免棱鏡測距技術獲取點云數據不完整區域的三維坐標,利用C#語言編寫了實用工具實現了本文提出的坐標轉換方法,將轉換后的數據在CAD中展點連線繪制出建筑立面圖。全站儀測量方法彌補了不完整的點云數據造成的數據缺失問題,同時也可以作為點云數據精確性的一種檢驗。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
