
國外智能汽車電子電氣架構綜述及分析
2019-01-04 07:57:46華一丁龔進峰唐風敏王文揚趙洪林
汽車電器 2018年12期
華一丁, 龔進峰, 戎 輝, 唐風敏, 王文揚, 趙洪林
(1.天津大學,天津 300072;2.中汽研 (天津)汽車工程研究院有限公司,天津 300300;3.中國汽車技術研究中心有限公司,天津 300300;4.天津職業技術師范大學,天津 300222)
近年來,隨著計算機、互聯網、通信導航、自動控制、人工智能、機器視覺、精密傳感器、高精度地圖等高新技術與先進汽車技術的快速融合,智能汽車 (或無人駕駛汽車、自動駕駛汽車)已經成為世界汽車工程領域的研究熱點和汽車產業增長的新動力。
智能汽車若要實現各種智能、互聯功能,取決于電子電氣架構的先進性以及數據處理的速度。目前,國內普遍以增加電子控制單元 (ECU)數量來應對額外的電子電氣系統需求,但是這種解決方案不僅成本高,而且會阻塞網絡、減慢數據傳輸、降低系統可靠性。國外主流主機廠采用基于通信主干網,分支網絡,多域控制器和貨架控制器的電子電氣架構,從而降低系統的復雜度[1]。因此,有必要研究國外先進車企 (以奧迪A8、寶馬7系和特斯拉為例)有關智能駕駛及整車電子電氣的先進架構,進而分析出相關自動駕駛控制器、車載傳感器、執行器以及所使用車載總線技術。最后,便可結合基于需求驅策型的自上而下和分層集成的電子電氣架構設計方法和流程,自主設計智能汽車電子電氣硬件系統架構。
1 奧迪A8
奧迪A8第5代搭載了L3級別的自動駕駛系統,是世界上首款實現L3級別自動駕駛的量產車。奧迪官方將該自動駕駛系統命名為“奧迪AI交通擁堵駕駛系統”,并加入了一個“Audi AI”操作按鈕來開啟自動駕駛功能,它允許車輛在低于時速60 km的情況下由系統完全接管駕駛[2-3]。屆時,汽車將自主完成加速、制動、轉向等駕駛操作。奧迪官方強調,駕駛員將不再需要在這個時候保持對車輛情況的監控,而是可以雙手離開方向盤,真正實現車輛在特定場景下的完全自動駕駛。如果車輛判斷這一情況下不能自主完成安全駕駛,會提醒駕駛員接管方向盤。
1.1 駕駛員輔助系統

圖1 奧迪A8傳感器位置
其中,G203~G206為后部駐車輔助傳感器,G252~G255為前部駐車輔助傳感器,G568~G569為前部自動泊車輔助傳感器,G716~G717為后部自動泊車輔助傳感器,R242為駕駛員輔助系統正面攝像頭,R243~R246為周圍環境攝像頭。
圖2展示的是自適應駕駛輔助系統用到的控制單元。
1.2 預測式高效輔助系統
使用車輛導航系統預測出的道路數據調節車輛的縱向動力學狀態,從而實現高效駕駛并能減輕駕駛員的負擔,如圖3所示。根據MMI-設置,車速限制、道路形態 (彎道、十字路口等)以及地形 (上坡、下坡)都集成在ACC-調節過程中了。
1.3 智能泊車輔助系統
智能泊車輔助系統在下述泊車情形時為駕駛員提供幫助:倒車進入縱向停車位;前行退出縱向停車位;在先駛過橫向停車位后前行進入橫向停車位;未駛過橫向停車位時前行進入橫向停車位;倒車進入橫向停車位。智能泊車輔助系統原理框圖如圖4所示。

圖2 自適應駕駛輔助系統用到的控制單元

圖3 預測式高效輔助系統原理框圖 (縱向調節)
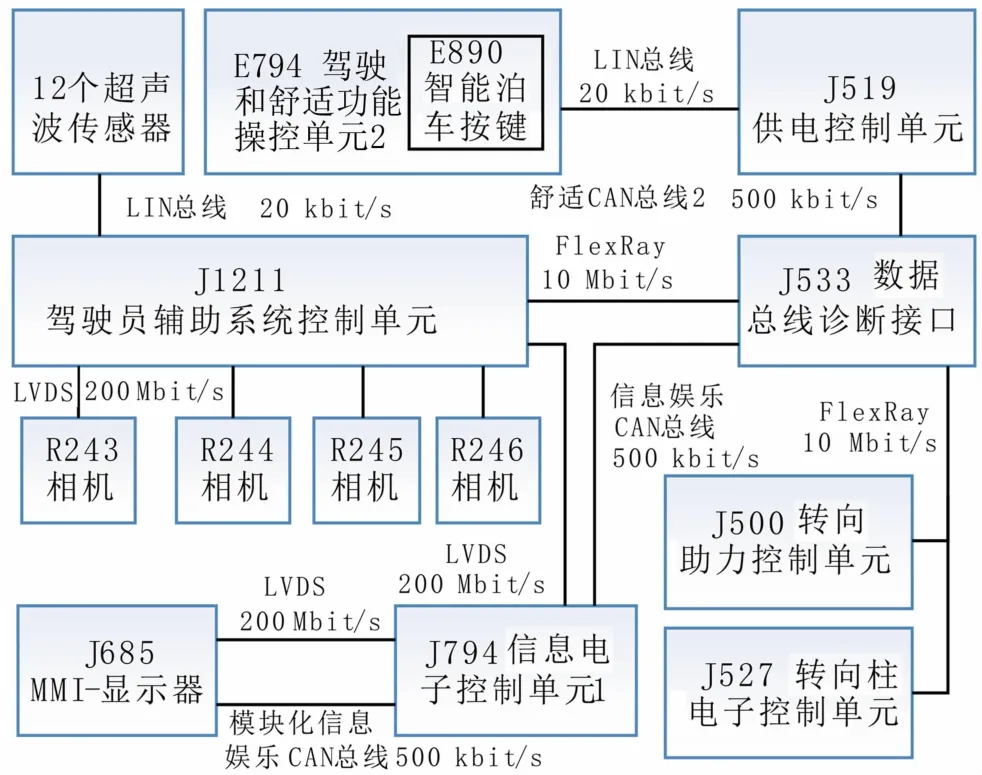
圖4 智能泊車輔助系統原理框圖
1.4 橫向輔助功能系統聯網
橫向輔助 (也可稱交叉路口輔助或十字路口輔助)是一種新型駕駛員輔助系統,首次用于Audi A8(車型4N)上,該系統可幫助駕駛員避免與本車前部橫向通過的車輛相撞。橫向輔助系統在本車前部橫向通過的車輛因視野受限而稍晚才能被駕駛員看到時為駕駛員提供幫助。這樣的視野受限情形比如有:十字路口以及穿行窄出口時。另外,在復雜交通情形時,比如駕駛員因注意看其他交通參與者而忽略了橫穿的交通參與者時,該系統也能為駕駛員提供幫助。橫向輔助系統原理框圖如圖5所示。
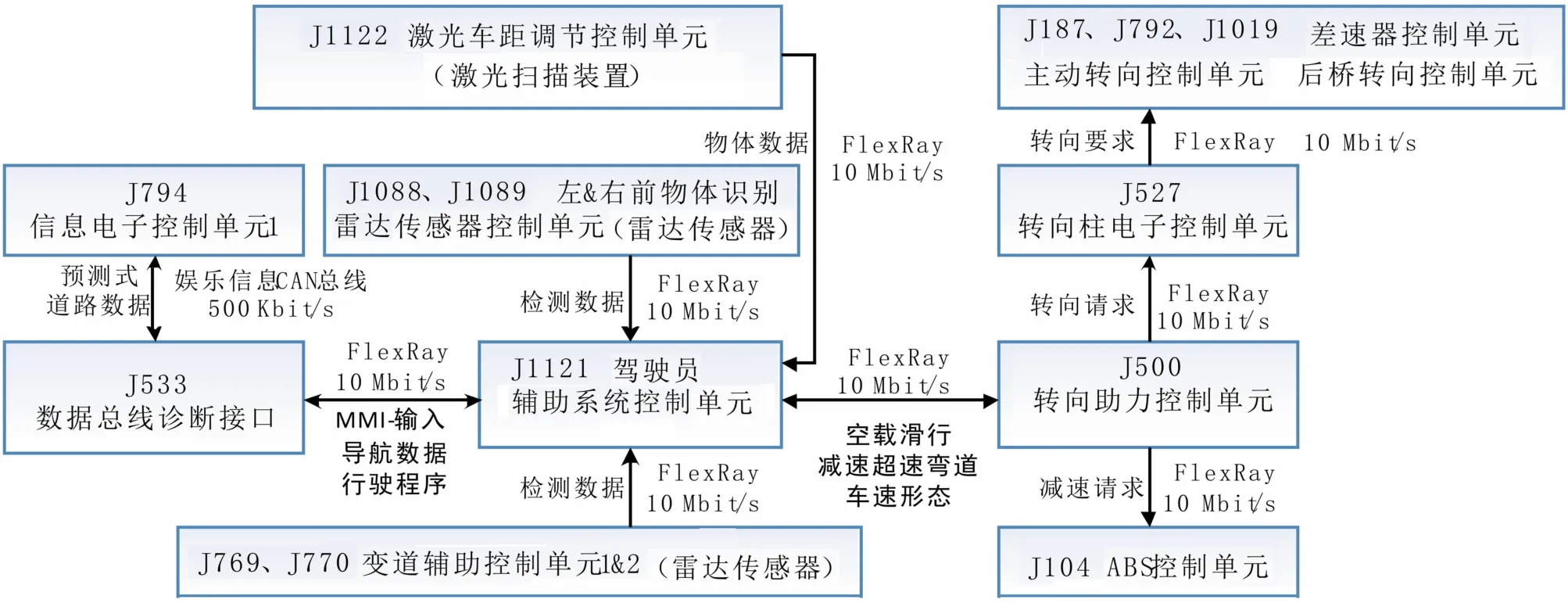
圖5 橫向輔助系統原理框圖
1.5 倒車攝像頭
奧迪A8上的倒車攝像頭是少數幾個不使用駕駛員輔助系統控制單元J1121的系統之一。攝像頭廣角圖像的修正、攝像頭的校準以及攝像頭上的輔助線投射,均由專用的倒車攝像頭控制單元J772來完成。
倒車攝像頭的圖像經屏蔽的FBAS-線直接被送到信息電子控制單元1-J794,圖像從這里再經2根屏蔽的LVDS-線傳至MMI-顯示器J685,從而顯示出圖像。倒車系統原理框圖見圖6。
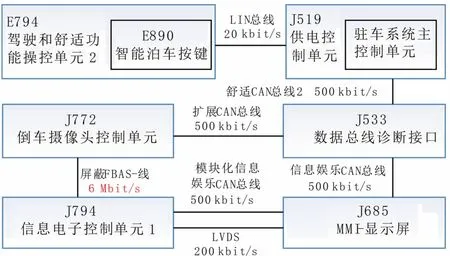
圖6 倒車系統原理框圖
1.6 第5代A8(4N)與第4代A8(4H)對比
第5代奧迪A8(4N)相較于第4代奧迪A8(4H)主要擴展了駕駛員輔助駕駛的范圍,且能在更多情形時通過最新的技術為駕駛員提供幫助。主要體現在以下幾個方面。
黃斌主席要求,各級工會負責幫扶工作的干部要用改革理念創新幫扶工作思路,吸引社會資源,改變“單打獨斗、單兵作戰”模式,要加強和改進工作方法,深入困難職工家庭,摸實情、出實招、用硬招,努力向職工提供更高水平的幫扶和服務,咱們工會干部切實成為職工信得過、靠得住、離不開的知心人、貼心人、“娘家人”,讓廣大職工特別是困難職工切實感到工會組織是真正的職工之家。□
1)配備了新的橫向輔助系統,該系統在因視野受限(比如十字路口以及穿行窄出口)時為駕駛員提供幫助。具體幫助方式是發出各種警報來提醒駕駛員,以避免本車與前方橫向來車發生碰撞等。
2)首次采用了自適應駕駛輔助系統,該系統能在車速0~250 km/h之間時幫助駕駛員同時進行車輛橫向控制和縱向控制。自適應駕駛輔助系統是將以前多個駕駛員輔助系統 (這些系統在別的奧迪車型上早就使用了)合成為一個系統。使用自適應駕駛輔助系統,首次在車速0~250 km/h之間可同時進行車輛橫向控制和縱向控制。所謂縱向控制,指車輛的加速和制動;所謂橫向控制,指車輛的轉向。但是在橫向控制時駕駛員必須一直把手放在方向盤上。Audi A8 4N添加自適應駕駛輔助系統如圖7所示。

圖7 Audi A8 4N添加自適應駕駛輔助系統
3)奧迪公司在Audi A8(車型4N)上首次使用了駕駛員輔助系統中央控制單元,該控制單元是多個輔助系統的主控制單元。這個中央控制單元在售后服務中被稱作駕駛員輔助系統控制單元J1121,該控制單元取代了數個我們熟知的控制單元 (其功能現在已集成到J1121內了)。多個傳感器直接連接在駕駛員輔助系統控制單元J1121上,不再使用車上的總線系統。傳感器數據的處理是在控制單元J1121內進行的,這些數據涉及駕駛員輔助系統正面攝像頭和4個周圍環境攝像頭。控制單元J1121還通過FlexRay總線接收其它傳感器發來的數據。一個控制單元內現在就可使用所有傳感器數據,就可為駕駛員提供車輛周圍高品質測量數據功能,另外這也是各種駕駛員輔助系統繼續提高性能的一個基礎。Audi A8 4N J759帶攝像頭框架圖見圖8。
圖8 Audi A8 4N J759帶攝像頭
2 寶馬7系
寶馬7系整合主動車距定速控制系統、主動車道維持輔助、擁塞交通輔助系統、車側防撞輔助、前方車流警示、路口車流防撞輔助、閃避轉向輔助等功能,使駕駛可以在不需控制油門的情況下跟前車維持距離,并且能在偏離車道時自動修正方向盤將車輛導回正常路線,甚至還可偵測前方車流與路口車流,主動介入控制制動及轉向來避免碰撞危險[4]。2016款7系轎車將支持遠程遙控停車/出車位。
2.1 車道偏離警告系統
通過車道偏離警告系統識別出偏離車道情況,借助振蕩執行機構產生相應方向盤振動,并通過相應警告燈發出車外后視鏡內的視覺警告時觸發,車速范圍在70~210 km/h。車道偏離警告系統原理框圖如圖9所示。
2.2 車道變更警告系統
首次將其應用于F01/F02車輛,車道變更警告系統SWW控制單元 (傳感器)位于后保險杠下方。車道變更警告系統SWW控制單元 (主控單元)位于右側,車道變更警告系統SWW2控制單元 (副控單元)位于左側。一些傳感器能夠根據天氣情況在最遠70m距離內進行有效探測。識別出車輛且啟用系統時,通過車外后視鏡內的相應顯示告知駕駛員情況。車道變更警告系統原理框圖見圖10。

圖9 車道偏離警告系統原理框圖

圖10 車道變更警告系統原理框圖
2.3 夜視系統
集成在BMW腎形格柵內,夜視系統可在夜間最佳條件下識別出最遠約100m處的行人和動物,在5°C以下溫度范圍內會接通一個加熱裝置,從而避免攝像機結冰。行人識別最遠約100m,大型動物識別最遠約150m,中型動物識別最遠約70m。夜視系統原理框圖見圖11。

圖11 夜視系統原理框圖
2.4 駐車和倒車系統
駐車操作輔助系統PMA可以測量停車位大小并根據測量結果確定停車位是否夠大,前部保險杠內的2個附加超聲波傳感器負責在行駛期間測量停車位,通過后部保險杠飾板內的4個超聲波傳感器和前部保險杠飾板內的另外4個超聲波傳感器測量與障礙物的距離,通過位于后部保險杠內的另外2個超聲波傳感器在停車入位過程中準確探測橫向停車位。通過附加 PDC傳感器測量與所識別目標的距離。駐車和倒車系統原理框圖見圖12。

圖12 駐車和倒車系統原理框圖
2.5 第6代G11/12與第5代F01/02對比
第6代7系寶馬在第5代的基礎上增添了如車道偏離警告系統、交通標志識別系統、環視系統、交叉行駛警告系統等智能輔助駕駛功能,同時更多地在娛樂、攝像機信號圖像傳輸等模塊使用高帶寬的以太網代替原來的LVDS傳輸。
中央網關模塊ZGM集成在BDC內,它可以說是控制單元中的控制單元,因為BDC內ZGM的工作方式就像是一個獨立的控制單元。ZGM將所有主總線系統彼此連接起來,將不同協議和速度轉換到其他總線系統上。通過ZGM可經過以太網將有關控制單元的編程數據傳輸到車輛上。
第3~6代輔助駕駛系統配置及智能駕駛分級見表1。
3 特斯拉M odel S
特斯拉Medel S有7種類型的控制器局域網 (CAN)總線。除2條總線外,所有的總線都連接到了中央網關。各個控制器使用這些總線在不同系統間傳遞數據。這些總線分別是底盤、車身、車身容錯 (Body-Fault tolerant)、動力總成、車載診斷II(On-Board Diagnostics II,OBDII)、快速充電 (Not connected to GTW)、穩定控制(Not connected to GTW)[5]。Medel S有5種LIN總線,它們具有以下功能:LIN 1——方向盤控制單元;LIN 2——12 V智能電池傳感器和監控單元;LIN 3——座椅加熱器和后視鏡;LIN 4——保留供將來使用;連接到整車控制模塊BCM的LIN總線傳輸來自左右車門傳感器的數據,因此車身控制器可以確保擋風玻璃刮水器、燈和HVAC系統的正確操作。特斯拉中央網關單元的媒體控制器有USB、e-net、line等線連接。特斯拉Medel S7控制器局域網總線框圖見圖13。
3.1 動力總成與快速充電總線
動力總成總線連接以下控制器:電池管理系統(Battery Management System,BMS)、主充電器 (Master charger)、從充電器 (Slave charger)、充電口 (Charge port)、直流-直流變換器 (DC-DC converter)、熱管理系統 (Tesla Thermal Controller,THC)、主驅動 變 頻 器(Master drive inverter);快速充電總線連接以下控制器:電池管理系統 (Battery Management System,BMS)、主充電器 (Master charger)。動力總成與快速充電總線圖見圖14。

圖13 特斯拉M edel S7控制器局域網總線框圖
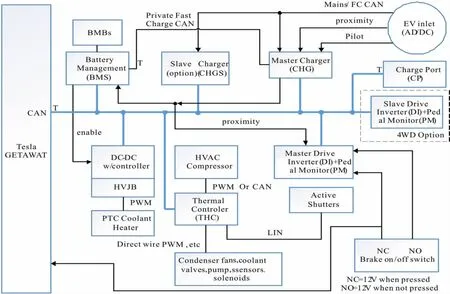
圖14 動力總成與快速充電總線圖
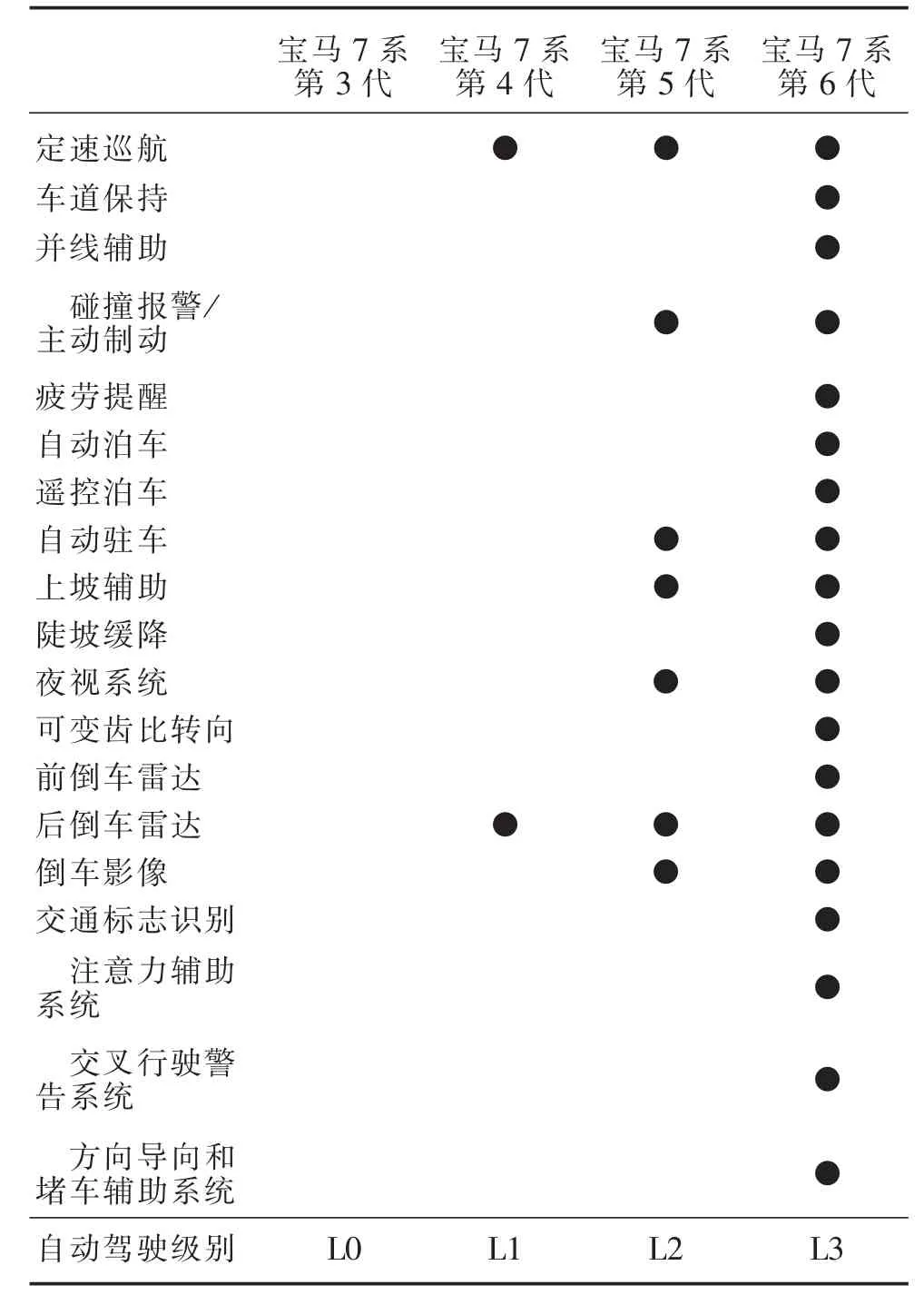
表1 第3~6代輔助駕駛系統配置及智能駕駛分級
動力總成與快速充電CAN在2個節點上都具有“T”。這表示總線的2個終止節點每個都為CAN總線增加120Ω。終止節點位于每條總線的末端,以幫助反映消息。從每個末端測量CAN總線的電阻值均為60Ω,這是由于2個120Ω在末端并聯的原因。
3.2 Tesla智能輔助駕駛系統對比其他車型
Autopilot1.0(現已很少使用)、Autopilot2.0(Tesla Model S)、Super Cruise (Cadillac CT6)、以及zFAS (Audi A8)傳感器比較如表2所示。

表2 智能輔助駕駛系統傳感器配置
在上述傳感器中,Autopilot2.0(Tesla Model S)目前8個攝像頭中,只有4個攝像頭用于智能輔助駕駛,分別為3個前視攝像頭 (正常、長焦、廣角)與一個后置攝像頭,無法像Super Cruise和zFAS一樣在車身兩側形成“環視+超聲波”的“雙保險”。zFAS(Audi A8)不用擁有最多的傳感器,更添加了激光雷達,這是Audi A8能夠先于Tesla Model S/X、Cadillac CT6成為全球首款自動駕駛level 3級別的量產車的重要原因之一。
3.3 Tesla智能輔助駕駛系統Autopilot發展及展望
在總線系統上,Tesla智能輔助駕駛系統Autopilot有著比較顯著的變化。在Autopilot 1.0中,所有總線幾乎都是通過CAN或LIN信號傳輸,在Autopilot 2.0中,控制器已經開始預留LVDS和以太網接口[6],Autopilot 2.5并對這些接口進行了進一步優化,Tesla智能輔助駕駛系統Autopilot進化史如表3所示。
3.4 Tesla Autopilot 2.0功能分析
如表4所示,Autopilot2.0核心內容由主動巡航控制[7]、輔助轉向、自動變道構成,可同時與車道輔助、防撞輔助、車速輔助等功能搭配使用。其中,主動巡航控制可以自動對車輛進行縱向控制,簡單來說就是開啟后系統接管了制動器,但駕駛員仍然需要手動控制方向盤。輔助轉向提供的自動橫向控制,取代了手動控制方向盤的操作。
4 總結
以太網總線技術是將來智能汽車電子電氣架構研究的發展方向。同時,單一傳感器已經無法滿足智能車輛高速發展的趨勢,因此,針對不同傳感器在空間及時間的多維數據進行標定及數據融合,同時引入機器學習算法,提高檢測的準確度,更加豐富完善的電子電氣硬件系統架構將是今后智能汽車研究的重點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
