
半自動泊車系統實驗室仿真測試
2019-01-04 07:57:50孫運璽谷原野節忠海黃春鵬孫久龍
汽車電器 2018年12期
關鍵詞:系統
孫運璽,谷原野,節忠海,孫 云,黃春鵬,孫久龍
(一汽轎車股份有限公司,吉林 長春 130000)
高級駕駛輔助系統目前已經普遍應用于乘用車,并逐步變為乘用車的標準配置,其中半自動泊車系統是高級駕駛輔助系統的一個重要功能。泊車系統可部分替代駕駛員觀察和判斷,能夠輔助駕駛員快速、準確、定位車位,整個泊車的過程中,駕駛員只需要按照系統的指示操作即可,并能夠按照系統指示安全、方便泊入或泊出車位,提高了泊車的方便性,減少泊車事故。泊車系統控制算法較為復雜,需要采集多路雷達的數據信息,判斷障礙物及車位信息,結合實際車速,并與EPS、TCU、IC等控制器協同控制實現泊車操作。研發過程中控制器的算法開發不是很完備,存在軟件漏洞和策略錯誤等情況,并且泊車系統涉及到駕駛安全,因此在實車驗證之前,必須在實驗室進行仿真測試,對泊車系統的控制策略進行充分的測試,降低實車測試的風險[1]。
1 半自動泊車系統
本文中所述的半自動泊車系統由控制器、短距和長距超聲波雷達構成,通過超聲波測量道路兩側的車位長度,選定適合的車位后,系統計算倒車軌跡并自動控制車輛的轉向系統,將車輛停靠在選定的車位中,駕駛員只需按照儀表的聲音或圖像提示控制車輛的擋位切換、油門及制動踏板。半自動泊車功能由水平泊入、垂直泊入、水平泊出3個子功能組成[2],泊入時分為車位搜索、泊車引導2個階段;泊出時只有泊車引導階段。聲音警示及系統操作提示通過儀表來實現,轉向操作與EPS控制器配合完成,換擋操作由TCU控制器配合完成。
半自動泊車系統共包括12個雷達傳感器,如圖1所示,其中前4個和后4個為短距超聲波雷達,主要探測前后距離,探測距離短;車輛兩側各有2個長距超聲波雷達,探測距離長。根據超聲波測距原理,控制器輪詢各傳感器發射和回波的時間差,內部經過濾波和運算,計算出實際可探測到的車位。
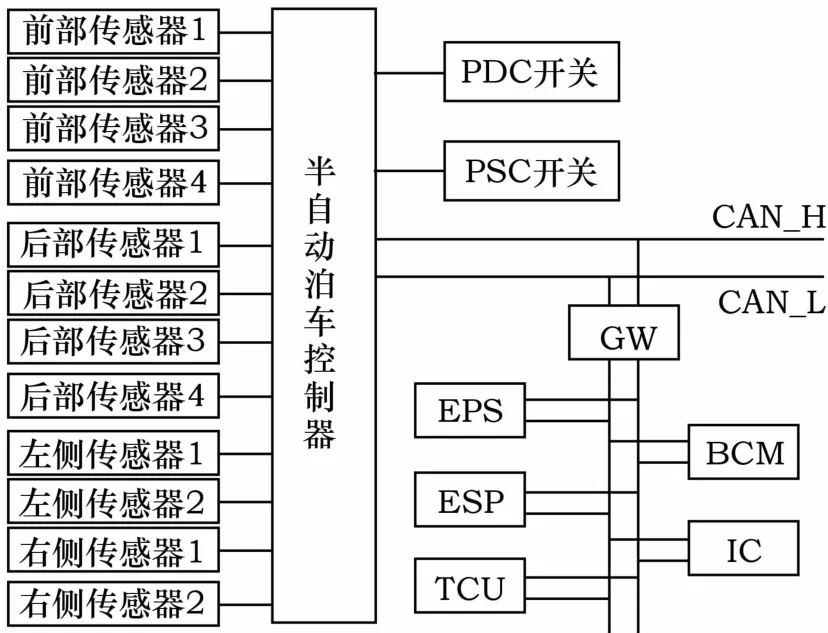
圖1 半自動泊車系統構成
2 自動化測試應用
2.1 自動化系統搭建
實驗室仿真測試系統主要由實時仿真系統、試驗管理系統、顯示系統構成,其系統搭建示意如圖2所示。其中實時仿真系統是自動化測試系統的核心,能夠運行車輛動力學模型和交通場景模型[3],可以正確模擬真實的車輛及其動力系統工作過程和車輛的運行外部環境 (交通場景、交通標志、建筑物等)。試驗管理系統由上位機和運行于上位機的試驗管理軟件組成,通過以太網線連接至實時仿真計算機,從而實現對系統的總體控制。通過試驗管理軟件,可以實現模型設置編譯下載、模型運行監控、讀取車輛實時信息、在線調參和對整個仿真平臺進行配置管理的功能。顯示系統用來顯示動畫場景,實現人-機互動,提升虛擬駕駛體驗。
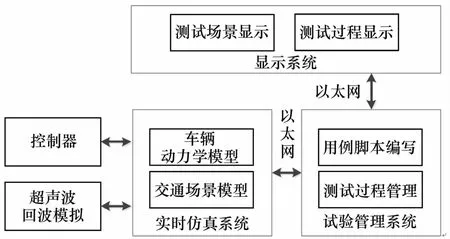
圖2 自動化系統搭建示意圖
半自動泊車控制器通過超聲波傳感器發送超聲波,同時接收反射后的超聲波判斷障礙物的位置。實驗室仿真系統的難點在于仿真超聲波信號,也是本實驗室測試仿真系統搭建的關鍵。超聲波回波模擬設備采用真實的超聲波傳感器與一個聲音換能器一起布置,障礙物的距離信息由車輛動力學仿真軟件通過硬件IO板卡發送到聲音換能器中,聲音換能器形成的超聲波由超聲波傳感器傳遞到自動泊車控制單元中,即可模擬障礙物的距離信息。
2.2 自動化測試執行
實驗室仿真測試的關鍵在于測試工況的開發,測試工況以ISO國際標準以及控制器的開發要求為基礎,覆蓋泊車的基本功能、泊車過程中出現故障后控制策略驗證以及泊車系統與整車其他控制器之間的交互功能,驗證泊車系統是否符合主機廠的規定以及安全性的要求,其中故障注入類的測試及各種極限工況的測試尤為重要,也是仿真測試的重點,下面舉例說明仿真測試的執行過程[4]。
2.2.1 測試用例1:PAC水平泊入測試
測試工況:水平車位長度6.8m,本車以速度10 km/h尋車位,車位找到后開始進行泊入和泊出驗證。
測試過程:①設置車位和目標車輛位置;②本車以10 km/h尋車;③尋到車位后本車開始進行泊入和泊出操作。
測試結果:車輛可以泊入到指定車位,泊出功能激活后本車可以泊出到指定位置。水平泊入泊出信號顯示如圖3所示。水平泊入泊出界面顯示如圖4所示。
2.2.2 測試用例2:POC泊出過程中出現方向盤轉角信號失效故障
測試工況:水平車位長度6.8m,本車以速度10 km/h尋車位,車位找到后開始進行泊入操作,提示等待轉向過程中出現方向盤轉角信號失效。
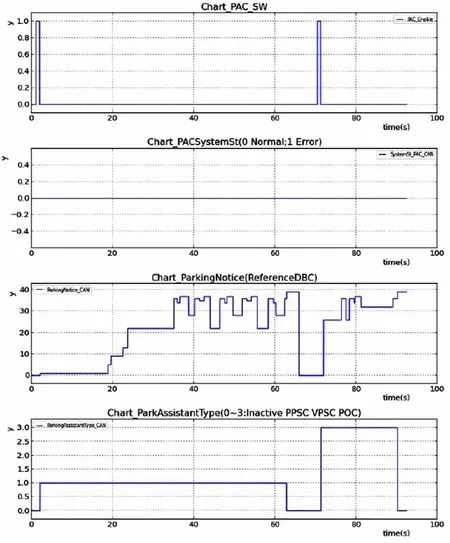
圖3 水平泊入泊出信號顯示
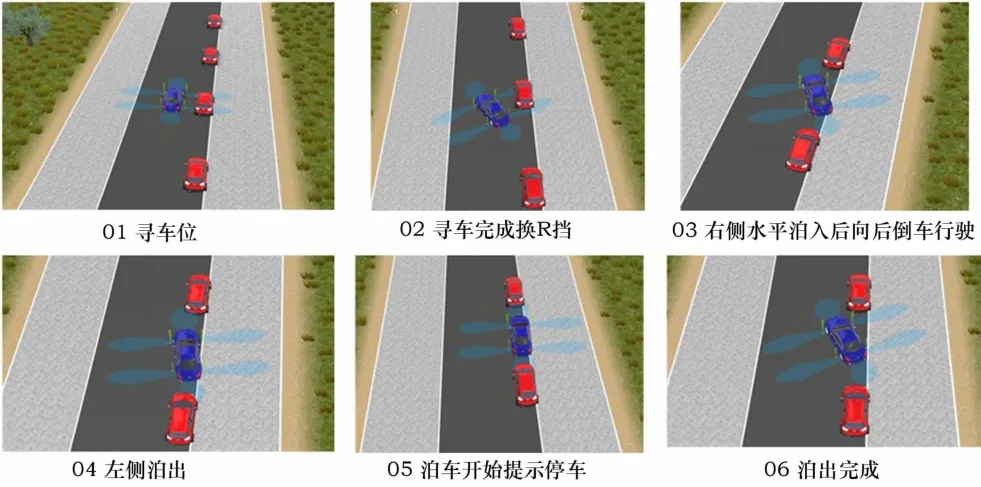
圖4 水平泊入泊出界面顯示
測試過程:①設置車位和目標車輛位置;②本車以10 km/h尋車;③尋到車位后本車開始進行泊入和泊出操作;④泊出過程在提示“等待轉向”過程中出現轉向盤轉角信號失效/超時故障。
測試結果:泊車退出,并給出提示信息。POC泊出過程中轉角信號失效顯示如圖5所示,泊車退出顯示如圖6所示。
通過實際測試驗證,本試驗仿真系統在泊車過程中的故障注入測試及雨雪天氣等故障狀態或極限工況的仿真測試非常方便,測試工況相對于實車測試具有可重復性和復現性,對于控制器泊車算法的測試驗證比較充分,對進入實車測試的安全性提供有利保障。
3 結論
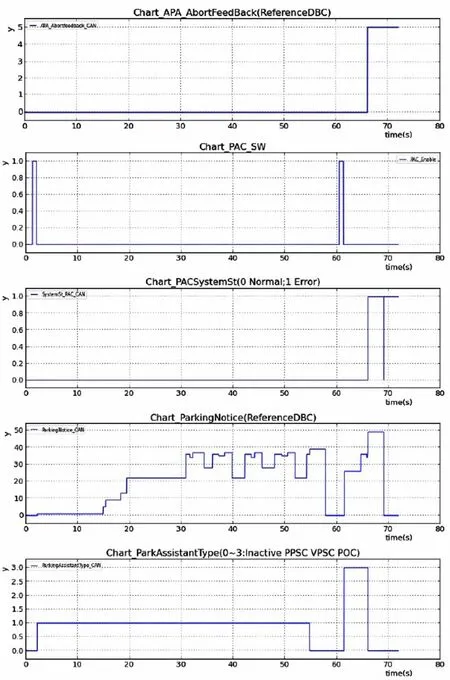
圖5 POC泊出過程中轉角信號失效顯示
本文詳細闡述了半自動泊車系統的工作原理,并介紹了實驗室仿真測試系統的搭建原理及測試方法,實驗室仿真測試能夠快速發現整車電氣在開發過程中出現的故障現象和極限工況,針對自動泊車復雜的控制策略和泊車算法,體現了明顯的測試效果和優勢,在實車測試前進行充分的驗證,有效降低實車測試的風險,保證了整車的泊車功能和性能。

圖6 泊車退出顯示
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
