基于節曲線凸性判別的行星輪系移栽機構解析
2019-01-05 07:43:44徐亞丹黃恒敏王振飛張國鳳武傳宇
農業機械學報 2018年12期
孫 良 徐亞丹 黃恒敏 王振飛 張國鳳 武傳宇
(1.浙江理工大學機械與自動控制學院, 杭州 310018; 2.浙江省種植裝備技術重點實驗室, 杭州 310018;3.杭州職業技術學院, 杭州 310018)
0 引言
非圓齒輪行星輪系機構廣泛應用于移栽機構、劍桿織機引緯機構、RCM機構等各種機械[1-5]。常用的設計方法有正向設計法與反向設計法。正向設計法通過調節輪系齒輪節曲線的形狀獲得滿足設計要求的運動軌跡,反向設計法基于給定軌跡通過剛體導引等方法求解機構參數[6]。以上兩種設計方法在實際應用過程中尚存在許多問題:正向設計法盲目性大,軌跡形狀與輪系齒輪節曲線形狀之間的關系不明確,難以獲得滿足設計要求的理想軌跡;反向設計法雖然給定了滿足設計要求的理想運動軌跡,但是求解出的齒輪節曲線形狀凹凸變形程度大,難以獲得合理的非圓齒輪。另外通過給定的運動軌跡求解出的機構參數存在尺寸不合理和在回轉過程中機構雙臂干涉的情況。
針對上述問題,本文提出一種基于非圓齒輪節曲線形狀和機構尺寸優化的軌跡反求方法。在反向設計法的基礎上,將實現平面運動軌跡的行星輪系機構簡化為平面開鏈二桿機構。在軌跡平面所在的全局坐標系內,通過對輪系中心解析區域內單行星架輪系機構非圓齒輪節曲線凸性值和桿長參數的求解,給出約束條件下的理想參數解域。通過設置解析區域給定輪系中心點在參考坐標系內的變化范圍,求解在解析區域內實現給定軌跡的輪系機構參數和齒輪節曲線凸性值。根據解析區域的求解結果,得到單行星架輪系機構參數信息圖。由圖可得各點對應的齒輪節曲線的凸性值、桿長、桿長比參數等信息,為對輪系中心位置和機構尺寸的選取提供指導,以得到滿足設計要求的最優行星輪系機構[7-9]。
1 運動學模型建立與計算
1.1 行星輪系機構簡化
單行星架輪系機構的運動軌跡C由行星輪上某一點Q的運動所形成,且行星輪軸心與點Q連線的絕對運動為往復擺動,即行星輪的絕對角位移為某一小角度的周期性函數[10-13]。不考慮輪系中傳動齒輪的嚙合關系,將這類輪系機構簡化為二桿二自由度開鏈機構,并以太陽輪中心為坐標系中心建立參考坐標系,如圖1所示。本文運用已知運動軌跡反求機構參數的方法,以給定的平面軌跡所處的坐標系為全局坐標系,在全局坐標系內以輪系中心O1為原點建立參考坐標系和輪系機構簡化模型,如圖2所示。在全局坐標系中隨著輪系中心點位置的變化,可以求解出無數組開鏈二桿機構實現軌跡再現,每組解對應的桿長和齒輪節曲線形狀各不相同。因此,確定輪系中心的位置是求解平面開鏈二桿機構的關鍵。
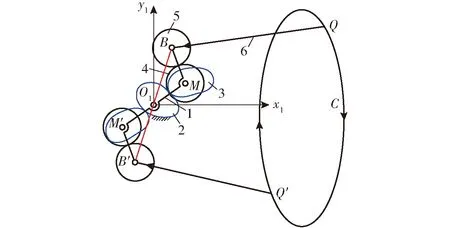
圖1 行星輪系機構原理圖Fig.1 Schematic of planetary gear mechanism1.行星架 2.太陽輪 3.下中間輪 4.上中間輪 5.行星輪 6.運動臂

圖2 開鏈二桿機構模型Fig.2 Two-link open loop chain mechanism model
圖2中Oxy為全局坐標系,O1x1y1為參考坐標系,矩形框為解析區域,O1點為輪系中心,Q點為與行星輪固連的某一點,圖1中C為在輪系周轉過程中Q點在全局坐標系下形成的運動軌跡。Lo表示在運動過程中輪系中心點O1與Q點的連線長度,La(第1桿)表示輪系的行星架長度,即太陽輪軸心到行星輪軸心的距離,Lb(第2桿)表示行星輪軸心到運動臂尖點Q的距離,L1表示軌跡曲線與輪系中心最近距離,L2表示軌跡曲線與輪系中心最遠距離。β1表示x1軸正方向到O1Q1的夾角,β2表示O1Q1到O1B的夾角,θ1表示x1軸正方向到O1B的夾角,θ2表示x1軸正方向到BQ1的夾角。
當輪系中心O1點坐標為(x0,y0)時,行星架La做周轉運動,Q從初始位置(x,y)沿給定軌跡移動,行星齒輪軸心B點坐標為(x1,y1)。根據其運動學理論可知,行星輪軸心與點Q連線的絕對運動為在(-π/2, π/2)范圍內往復擺動。由圖2可知,輸入角θ1和輸出角θ2計算公式為
θ1=β1+β2
(1)
(2)
行星架做周轉運動,在轉動過程中不會出現回轉的情況,故θ1是周期為2π的單調函數。根據β1、β2的定義可知,β1、β2均為矢量角,β2大小為三角形O1BQ1的內角。當桿La和桿Lb所在直線重合時,即Q處在軌跡曲線上距離輪系中心最遠、最近兩點。上述參數計算公式為
(3)
(4)
(5)
在單行星架周轉輪系機構中,太陽輪與機架固定,行星架勻速轉動。假設行星架的轉速為nH(即第1桿的轉速),行星輪的轉速為ni(即第2桿的轉速)。單行星架周轉輪系機構的總傳動比計算公式為
(6)
1.2 非圓齒輪傳動比的分配
單行星架輪系機構采用二級齒輪傳動,故需要對計算得到的總傳動比進行分配。一對非圓齒輪傳動要保證主動齒輪轉動一周從動齒輪也轉動一周,傳動比應滿足
i=i1i2
(7)

(8)
式中i1——一級齒輪傳動比
i2——二級齒輪傳動比
1.3 非圓齒輪節曲線凸性判定
假設一對嚙合齒輪中主動齒輪為齒輪1,從動齒輪為齒輪2,兩齒輪中心距為a。由一對嚙合齒輪傳動的原理可知傳動比i12為
(9)
式中n1——主動齒輪轉速
n2——從動齒輪轉速
r1——主動齒輪節曲線半徑
r2——從動齒輪節曲線半徑
當主動齒輪轉過φ1時,從動齒輪轉角φ2為
(10)
對于一對非圓齒輪傳動時,當主動齒輪的轉角為φ1時,對應的齒輪傳動比為函數i(φ1),在極坐標系中主動齒輪半徑為
(11)
封閉非圓齒輪節曲線為全凸形即節曲線的曲率半徑為非負數。在極坐標方程中曲線曲率半徑ρ的計算公式為
(12)
式中r——齒輪節曲線半徑
當主動齒輪節曲線為全凸形時,主動齒輪節曲線曲率半徑ρ1≥0。將主動齒輪節曲線半徑函數式(11)代入式(12)中可得ρ1為
(13)
由式(11)可得
(14)
(15)
式中i′——傳動比曲線的一階導函數
i″——傳動比曲線的二階導函數
式(14)、(15)代入式(13)中可得
(16)
由式(16)知,主動非圓齒輪為全凸形齒輪時,ρ1≥0。因為式(16)的分子為正數,所以分母
pa=1+i+i″≥0
(17)
式中pa——主動齒輪凸性值
從動齒輪的轉角為φ2,在極坐標系中從動齒輪的半徑
(18)
從動齒輪節曲線為全凸形時,從動齒輪節曲線曲率半徑ρ2≥0。將從動齒輪節曲線半徑函數式(18)代入曲率公式(12)中可得ρ2為
(19)
由式(10)可得

(20)
(21)
(22)
式(21)、(22)代入式(19)中可得
(23)
由式(23)可知,從動非圓齒輪為全凸形齒輪時,ρ2≥0。因為齒輪傳動比為正數,即分子為正數,所以分母為非負數。
pb=1+i-ii″+i′2≥0
(24)
式中pb——從動齒輪凸性值
將各子級傳動比代入式(17)、(24),計算表示非圓齒輪節曲線凸性值pa、pb,越小表明非圓齒輪節曲線上該位置的凸性越差,選取pa、pb較小值表示一對非圓齒輪節曲線凸性。
2 運動軌跡求解與分析
2.1 圓軌跡的求解與分析
在全局坐標系內給定滿足設計要求的運動軌跡曲線,并確定輪系中心解析區域范圍。設置搜索步長確定計算精度,在解析區域內輪系中心點坐標(x0,y0)按步長遞進。在軌跡曲線不變的情況下,輪系中心點的變化使得形成該軌跡的輪系機構參數(桿長La、桿長比、齒輪節曲線凸性值)發生變化。對輪系中心點位于解析區域內各位置點時輪系機構屬性進行計算,并將計算結果用桿長等高線、桿長比等高線、齒輪節曲線凸性值等高線表示,繪制單行星架輪系機構屬性圖,計算過程如下:輪系中心的坐標為(x0+Δx0,y0+Δy0),其中Δx0、Δy0為中心點坐標的變化量即步長,在解析區域內按步長搜索整個目標區域。軌跡方程為f(x,y),軌跡上某點到輪系中心的距離為L。輪系中心點和軌跡曲線最近距離為L1,最遠距離為L2。式中輪系中心坐標值已知,軌跡曲線x、y為自變量,有
(25)
(26)
由式(5)可得,輪系中心在該位置點時形成該軌跡的機構桿長和桿長比參數。由式(1)~(6)可計算出機構復演該軌跡兩桿轉角角位移曲線與輪系總傳動比。將總傳動比按照運動學原理分配成兩級子傳動比,并計算由子傳動比曲線得到的非圓齒輪節曲線的凸性值。按步長移動輪系中心的坐標重復上述計算過程。將解析區域內輪系中心在各點時的輪系機構參數以La等高線、桿長比等高線、非圓齒輪節曲線凸性值等高線連接,形成單行星架輪系機構參數信息圖。
通過分析解析區域內單行星架機構參數信息圖,為設計可形成特定軌跡的輪系機構提供參考。以上方法建立了非圓齒輪節曲線形狀與運動軌跡之間的直接聯系,避免了調試非圓齒輪節曲線的盲目性。另外,解析區域內的單行星架輪系機構參數信息圖將指導特定目標運動軌跡的單行星架輪系機構的快速求解,給出了約束條件下最理想的實用解[14-15]。
例如,利用上述求解方法對全局坐標系內的圓形軌跡進行分析計算。計算精度取0.1 mm,解析區域選取(-50 mm,-50 mm)—(50 mm,50 mm)矩形范圍進行分析計算,計算結果如圖3所示。
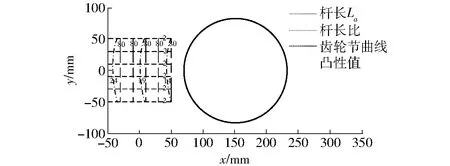
圖3 圓軌跡單行星架輪系機構參數信息圖Fig.3 Parameter information diagram of single planetary gear train mechanism with circular trajectory
從計算結果可知,對于形成圓軌跡的行星輪系機構,其行星架長度La為圓軌跡的半徑,與輪系中心位置無關;其傳動齒輪組均為圓齒輪且傳動比恒為1,節曲線凸性值為2,齒輪節曲線形狀與輪系中心位置無關;桿長比隨著輪系中心位置不同而變化,隨著輪系中心遠離軌跡曲線而增大。對于圓齒輪傳動的單行星架輪系機構,行星輪上固連點Q形成的軌跡與行星輪中心點形成的軌跡形狀相同但位置不同。通過運動學分析可知,傳動比恒為1的單行星架輪系機構行星輪繞著太陽輪周轉,其齒輪中心點形成的軌跡是以太陽輪中心為原點,以行星架長度為半徑的圓。行星輪固連點與齒輪中心距離的變化引起運動軌跡位置的改變。驗證了圓軌跡單行星架輪系機構參數信息圖求解的正確性。Lb可以通過圖中桿長比參數的最優解來確定。設計者可以根據設計需要改變解析區域的范圍,進而重新計算單行星架輪系機構參數信息圖。
2.2 水稻移栽機構軌跡的計算與分析
常見的水稻移栽軌跡有適用于高速插秧機構的“海豚形”軌跡和“腰子形”軌跡;適用于水稻缽苗移栽機構的“8字形”軌跡和“鷹嘴形”軌跡。為了能得到更好滿足農藝要求的水稻移栽機構[16-19],本文對水稻移栽軌跡進行計算分析。
2.2.1高速插秧機構軌跡計算與分析
(1)“海豚形”軌跡
對高速插秧機構的“海豚形”軌跡進行計算,在全局坐標系內給定控制軌跡整體形狀的若干型值點(表1),通過三次非均勻B樣條擬合求得軌跡曲線如圖4a所示。綜合軌跡在全局坐標系內的范圍和輪系中心點的范圍,選取(-80 mm, -30 mm)—(20 mm, 50 mm)為解析區域進行求解,計算結果如圖4b所示。
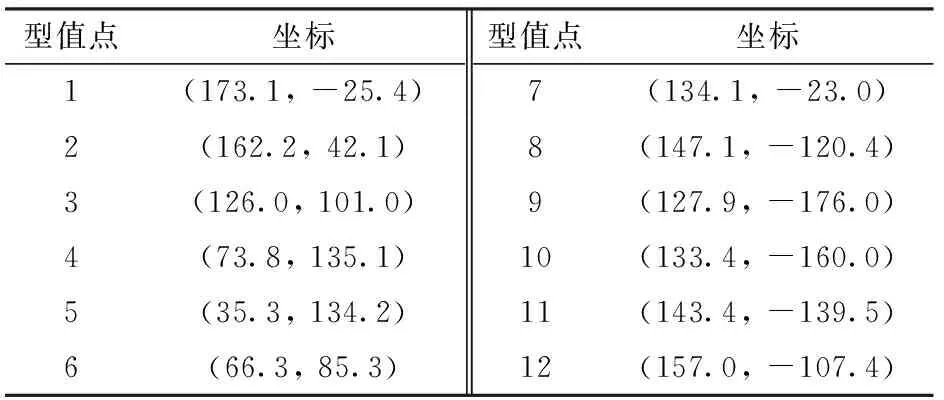
表1 “海豚形”軌跡型值點坐標Tab.1 Dolphin-shaped trajectory point coordinates mm
圖4b中桿長La曲線在解析區域內漸變式分布,桿長隨輪系中心由上到下逐漸減小;由于軌跡平面形狀較為復雜,形成該軌跡的輪系齒輪是非圓齒輪,輪系中心點在不同位置時齒輪節曲線凸性值有很大差別,齒輪節曲線凸性值等高線在解析區域內分布不均勻,解析區域從上到下齒輪節曲線內凹程度迅速增長;桿長比曲線在解析區域內從右上角向左下角逐漸增大。在輪系機構設計過程中,根據齒輪節曲線形狀和桿長條件的設計要求,在所需解析區域內尋找約束條件下的最優解[20-21]。

圖4 “海豚形”軌跡單行星架輪系機構參數信息圖Fig.4 Parameter information diagram of single planetary gear train mechanism with dolphin-shaped trajectory
(2)“腰子形”軌跡
對高速插秧機構的另一種移栽軌跡“腰子形”軌跡進行計算。在全局坐標系內給定控制軌跡整體形狀的若干型值點(表2),通過三次非均勻B樣條擬合求得軌跡曲線如圖5a所示。綜合軌跡在全局坐標系內的范圍和輪系中心點的范圍,選取(-50 mm, -30 mm)—(50 mm, 50 mm)為解析區域進行求解,計算結果如圖5b所示。
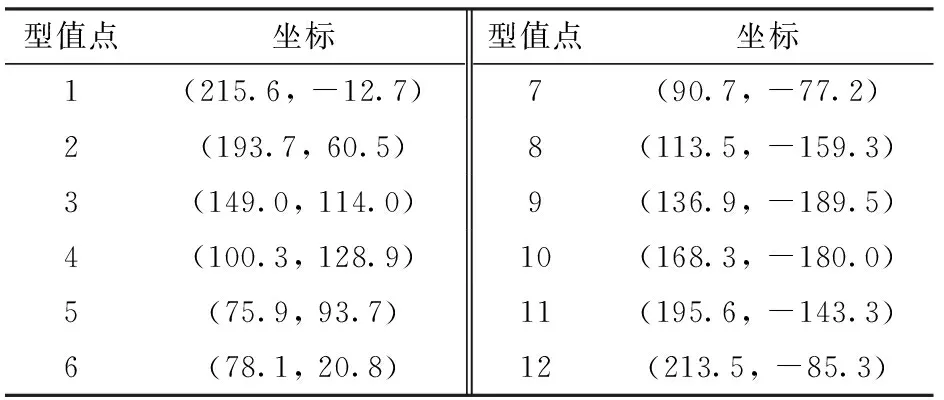
表2 “腰子形”軌跡型值點坐標Tab.2 Porcine lumbar trajectory point coordinates mm
由計算結果可知,“腰子形”軌跡和“海豚形”軌跡機構參數信息圖類似,桿長La、桿長比、非圓齒輪節曲線呈漸變式分布,桿長La隨輪系中心由右上到左下逐漸減小;由于軌跡形狀與圓軌跡類似,較為簡單。輪系中心點在不同位置時齒輪節曲線凸性值差別較小,齒輪節曲線凸性值等高線在解析區域內分布不均勻,解析區域從左上到右下齒輪節曲線內凹程度變大;桿長比曲線在解析區域內從右向左逐漸增大。在輪系機構設計過程中,根據齒輪節曲線形狀和桿長條件的設計要求,在所需解析區域內尋找約束條件下的最優解。
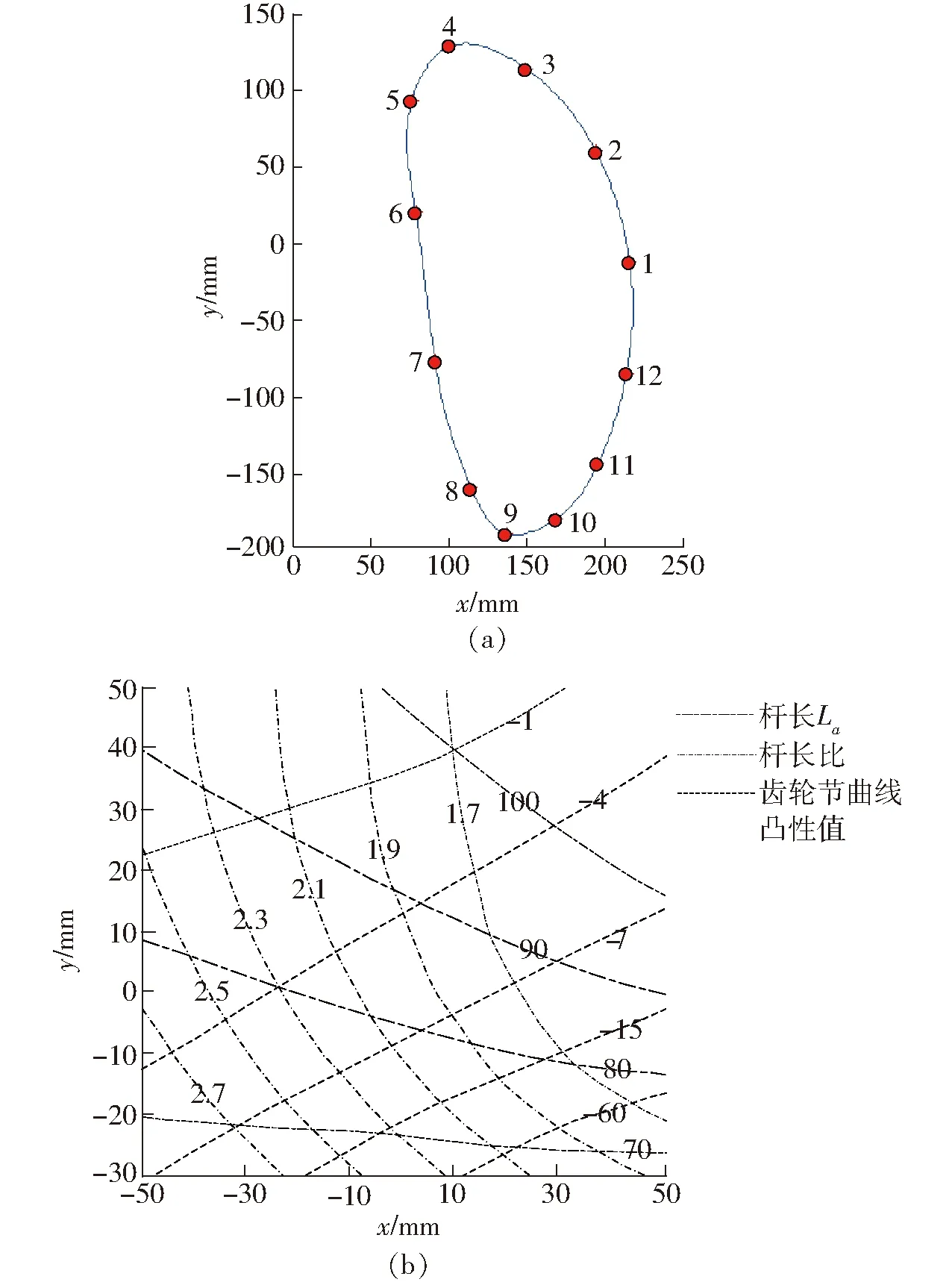
圖5 “腰子形”軌跡單行星架輪系機構參數信息圖Fig.5 Parameter information diagram of single planetary gear train mechanism with porcine lumbar trajectory
2.2.2水稻缽苗移栽機構軌跡計算與分析
(1)“8”字形軌跡
夾苗式行星輪系水稻缽苗移栽機構的移栽軌跡為形狀不規則且較為復雜的“8”字形軌跡,取若干型值點如表3所示,利用三次非均勻B樣條擬合出“8”字形軌跡曲線如圖6a所示。根據實際需要,選取(-30 mm, -30 mm)—(50 mm, 50 mm)為解析區域,求解結果如圖6b所示。
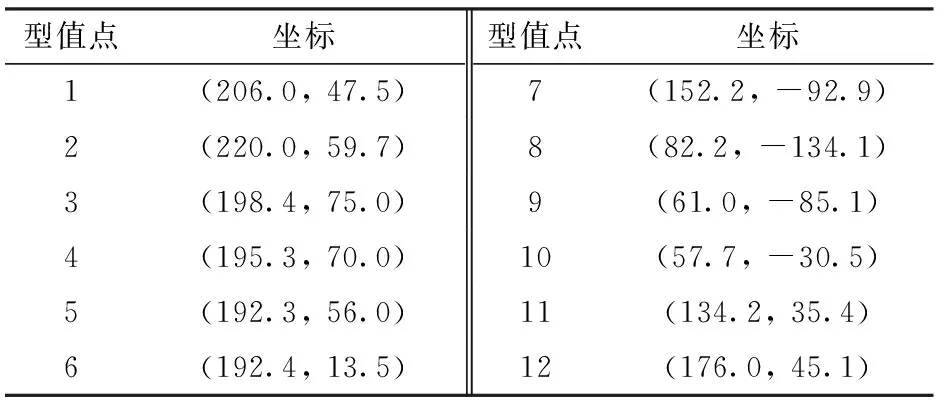
表3 “8”字形軌跡型值點坐標Tab.3 “8” shaped trajectory point coordinates mm

圖6 “8”字形軌跡單行星架輪系機構參數信息圖Fig.6 Parameter information diagram of single planetary gear train mechanism with “8” shaped trajectory
從圖6b可以看出,桿長La曲線在解析區域內呈漸變式分布,桿長隨輪系中心位置的變化而變化;因為軌跡平面形狀較為復雜,形成該軌跡的輪系齒輪節曲線凸性值比較小即齒輪節曲線內凹,且在解析區域內分布不均勻,解析區域從下到上齒輪節曲線內凹程度迅速增長;桿長比曲線在解析區域內從右下角向左上角逐漸增大。在輪系機構設計過程中,根據設計要求的約束條件在解析區域內尋找最優解。
(2)“鷹嘴形”軌跡
夾土式行星輪系水稻缽苗移栽機構的移栽軌跡為鷹嘴形,取若干型值點如表4所示,利用三次非均勻B樣條擬合形成軌跡曲線如圖7a所示。根據實際需要,選取(-50 mm, -30 mm)—(30 mm, 20 mm)為解析區域,求解結果如圖7b所示。
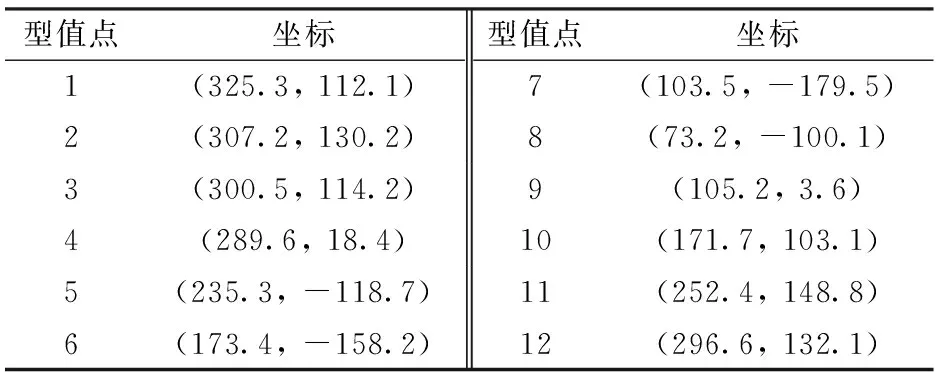
表4 “鷹嘴形”軌跡型值點坐標Tab.4 Eagle-nosed trajectory point coordinates mm
由圖7b可知,桿長La曲線在解析區域內漸變式分布,桿長隨輪系中心位置的變化而變化,在解析區域內由上到下逐漸變大;由于鷹嘴形軌跡形狀較為復雜,形成該軌跡的輪系齒輪節曲線凸性值比較小,解析區域內輪系中心點在不同位置時齒輪節曲線形狀差異較大且內凹較為嚴重;桿長比曲線在解析區域內從右向左逐漸增大。
從上述實現4種軌跡的單行星架輪系機構參數信息圖可以看出,軌跡形狀與圓形軌跡越相近,則在解析區域內齒輪節曲線凸性值越接近2,非圓齒輪工作性能越好。如“腰子形”軌跡齒輪節曲線凸性值接近圓齒輪凸性值,近似全凸形齒輪,工作性能優異。“8”字形、“海豚形”、“鷹嘴形”軌跡形狀較復雜,形成這類軌跡的輪系在解析區域內齒輪節曲線凸性值差異較大,齒廓存在一定程度的根切。圓軌跡的輪系機構的桿長La與輪系中心位置無關,只與圓軌跡的半徑有關;非圓軌跡的桿長La與輪系中心和軌跡的相對位置有關。桿長比與輪系中心在全局坐標系內的位置相關。在設計過程中根據解析區域內輪系機構的參數信息選取輪系中心避免了盲目性,可以達到機構參數的最優化。
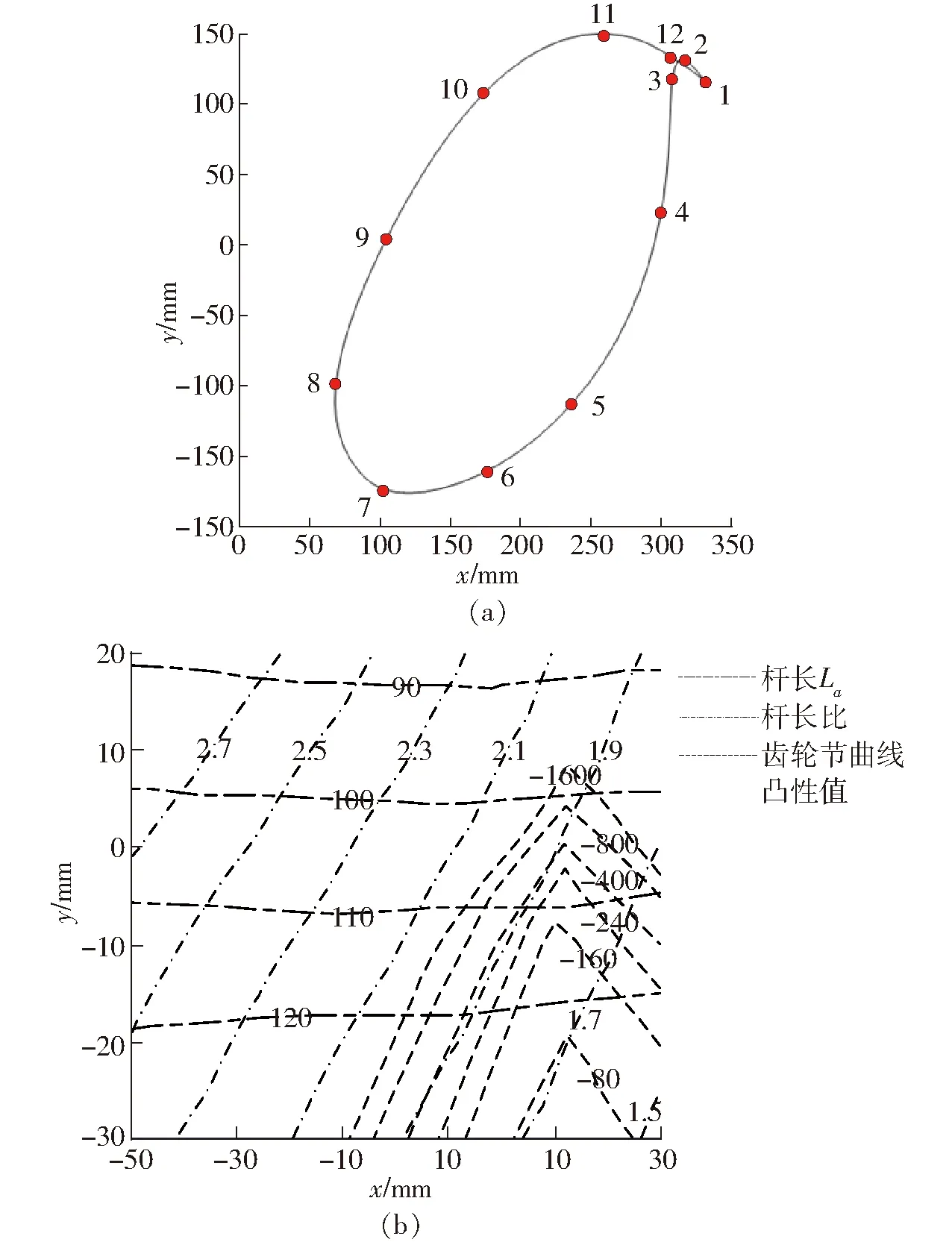
圖7 鷹嘴形軌跡單行星架輪系機構參數信息圖Fig.7 Parameter information diagram of single planetary gear train mechanism with eagle-nosed trajectory
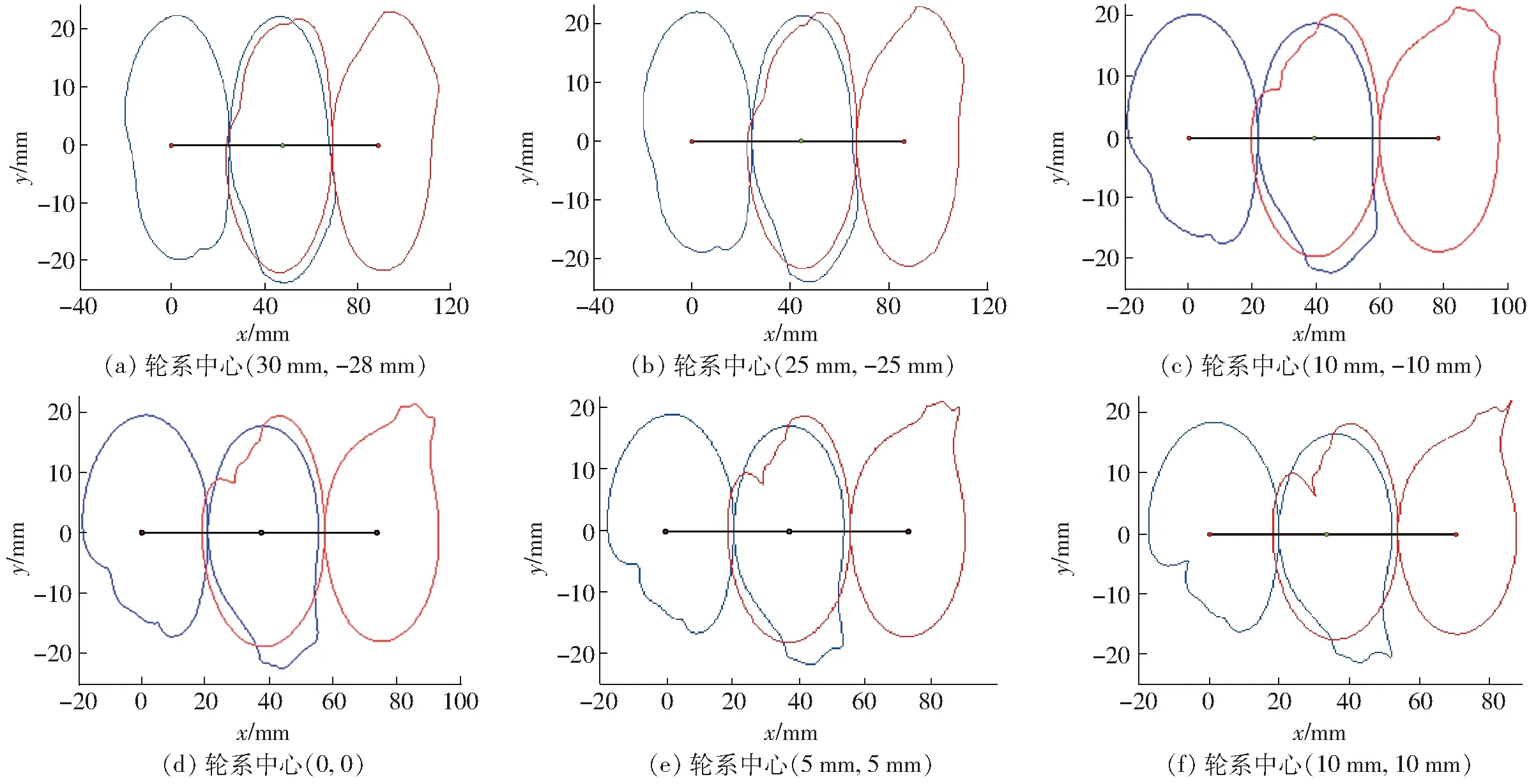
圖8 不同輪系中心位置對應機構齒輪節曲線組合Fig.8 Combination of gear pitch curves for each position of planetary gear train mechanism center
2.3 參數信息圖的分析
分析圖6b所示“8”字形軌跡單行星架輪系機構參數信息圖,在解析區域內分別選取輪系中心點為(30 mm, -28 mm)、(25 mm, -25 mm)、(10 mm, -10 mm)、(0, 0)、(5 mm, 5 mm)、(10 mm, 10 mm),計算形成該軌跡的輪系機構總傳動比,并對總傳動比進行兩級分配,得到傳動非圓齒輪節曲線形狀如圖8所示。對比圖8a~8f可知,輪系中心位置對非圓齒輪節曲線形狀有影響。
La為行星輪中心到太陽輪中心的距離,反映了行星架的尺寸。Lb為運動臂的長度。在設計過程中,設計不同用途的單行星架輪系機構時,由于對尺寸的要求不同,首先在La目標區域內確定輪系機構的參數,可以避免因行星架尺寸不滿足設計要求而引起的對定軌跡的多次反求計算。單行星架行星輪系機構一般采用雙運動臂布局用以提高工作效率,結構簡圖如圖9所示。O3G1D1、O5G2D2為兩個運動臂,輪系周轉運動過程中,雙臂做擺動運動。當桿長比值過大時,在周轉的過程中運動臂G1D1會與G2D2發生干涉。當桿長比大于2時即O3D1的長度大于O3O5時,G1D1在行星架周轉過程做擺動運動,會與行星齒輪軸O5發生干涉,影響輪系機構的正常運轉。故設計輪系機構時桿長比要小于2。不同功能的單行星架輪系機構運動臂有不同的結構,運動臂固定在行星架的初始角,所需移栽臂的運動軌跡會影響周轉過程中雙臂的干涉問題。設計者根據實際設計需要考慮G1H1的長度,運動臂初始安裝角的大小和運動軌跡的形狀,初步確定桿長比范圍求解最優機構參數。避免在設計過程中因桿長比過大而產生干涉;或因桿長比過小導致運動臂結構尺寸偏小,從而增加了零件結構設計的難度。本文通過計算解析區域內單行星架輪系機構參數信息圖使設計者明確機構的變化趨勢,為機構設計時參數的選取提供參考[22-23]。
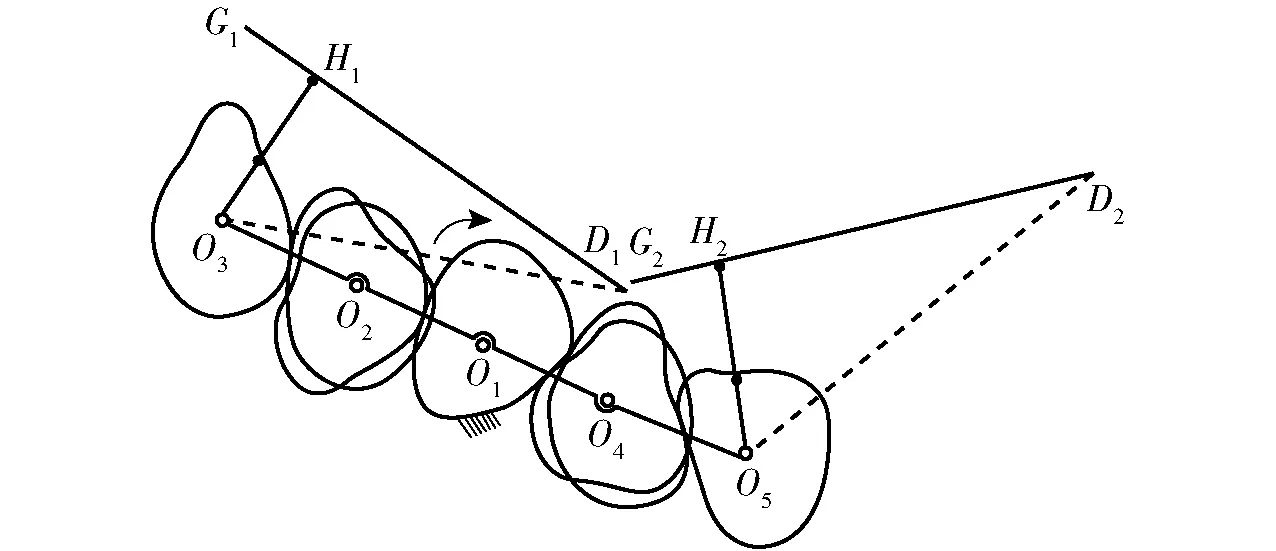
圖9 雙臂回轉示意圖Fig.9 Schematic of double transplanting arm rotation
3 應用實例

根據上述機構參數,進行移栽機構設計、樣機加工[24]與試驗驗證。將移栽機構虛擬樣機的仿真軌跡(圖11)、試驗軌跡(圖12)與理論軌跡(圖7a)作對比,可以看出仿真軌跡、試驗軌跡與理論軌跡基本一致,驗證了移栽機構物理樣機的正確性,進一步驗證了所提出的基于節曲線凸性判別的行星輪系移栽機構求解與分析方法的正確性。
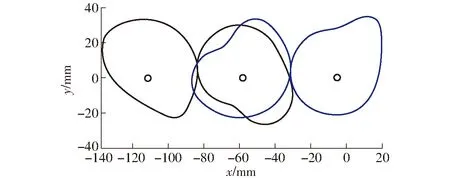
圖10 兩級非圓齒輪傳動節曲線Fig.10 Pitch curves of two stage non-circular gear transmission

圖11 仿真軌跡Fig.11 Simulation trajectory
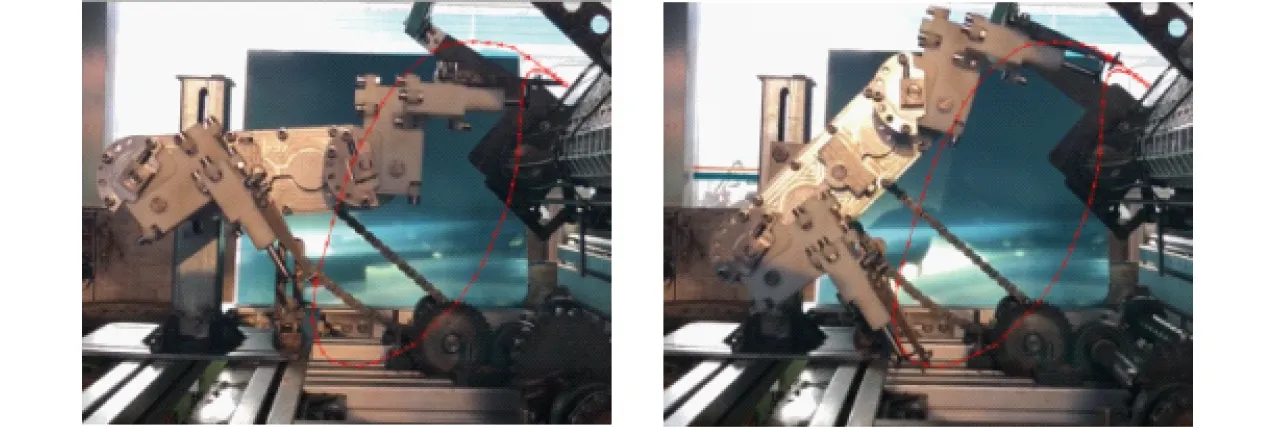
圖12 試驗軌跡Fig.12 Test trajectory
4 結論
(1)提出了基于節曲線凸性判別的行星輪系移栽機構求解與分析方法,得到了解析區域內單行星架輪系中心在各位置時的桿長La、桿長比、齒輪節曲線凸性值。
(2)通過輪系機構參數信息圖的方式為設計者提供參考,避免了正向設計過程中軌跡的不確定性和反向設計過程中輪系中心位置選取的盲目性,有利于設計者明確機構參數在解析區域內的變化趨勢。
(3)對水稻移栽的幾種常用軌跡進行計算分析,任選一種移栽軌跡進行輪系機構設計。根據輪系機構參數信息圖選取輪系中心,并進行虛擬仿真與樣機試驗。進一步驗證了所提出的基于節曲線凸性判別的行星輪系移栽機構求解與分析方法的正確性。該方法簡化了輪系機構設計的優化過程,簡單實用。
