納衛星電磁對接機構技術
2019-01-08 05:35:20慕忠成葉東吳樹范
北京航空航天大學學報 2018年12期
關鍵詞:模型
慕忠成, 葉東, 吳樹范,*
(1. 上海交通大學航空航天學院, 上海 200240; 2. 哈爾濱工業大學航天學院, 哈爾濱 150001)
隨著微電子、微機械系統和集成電路的快速發展,衛星小型化技術有了大幅進步。在此背景下, 1999年,斯坦福大學的Bob Twiggs提出立方星,引起了廣泛關注[1]。立方星形狀如名,是邊長為10 cm的立方體,輸出功率相當于手機,在幾瓦范圍內,重量不足1.3 kg[1-2]。立方星大量采用貨架產品,具有成本低、研制周期短、擴展性強等特點,一般應用于小型試驗、對地觀測和業余無線電通信等。統計顯示,2013—2015年,274顆立方星已成功發射。2014年,立方星被《科學》雜志評選為10大科學突破之一。一方面,隨著載荷技術的提升,立方星空間應用得到拓展,已經開始由“試驗應用型”向“業務服務型”轉變[3-5],另一方面,在軌重構和在軌組裝引起越來越多研究人員的關注。然而傳統的在軌交匯對接技術主要通過推力器配合相應敏感器實現,在近距離對接階段,為避免碰撞,控制精度要求相對比較高,并且容易產生羽流污染和沖擊力等方面的問題。對此,利用電磁技術實現在軌交匯對接成為近幾年研究熱點,尤其是針對電磁對接中的動力學及控制問題[6-10]。對比基于推力器的對接方式,電磁對接技術不需要消耗燃料,且無對接沖擊和羽流污染等優勢[11]。但是,在現有技術條件下,由于其所能夠提供的電磁力量級較小,僅適用微小型航天器的對接驅動需求[12-13]。
綜上所述,電磁對接技術與立方星技術的結合,不僅彌補了當前電磁對接技術的缺陷,而且進一步促進了立方星空間應用,增強立方星空間重構特性,一定程度上補償軟件重構的不足。利用電磁對接技術,具有模塊化標準化特性的立方星可以像樂高積木一樣,進行空間自主分離和重組。本文以此為背景,首先,結合立方星自身約束,設計出一種適用于立方星的低成本電磁對接機構。然后,通過理論分析,給出了適用于工程應用的電磁力和電磁力矩模型,并通過數值仿真方法,研究了鐵芯的影響,以此來彌補理論分析的不足。
1 電磁對接機構設計
電磁對接的主要特征是電磁體之間的作用力隨距離的增加而減小,其量級與電磁體材料與結構密切相關[8]。在距離范圍、功耗、質量等約束下,適用于微納衛星編隊飛行與交會對接所需大小的電磁力/力矩,當前主要存在2種電磁力產生方式:一是采用“超導線圈”;二是在普通線圈中加鐵芯以增加電磁力[14-15]。
超導體材料對熱環境的要求比較苛刻,在地面試驗中需要采用液氮冷卻,在太空中需要設計專門的熱系統進行制冷,從而增加額外的制冷設備和功耗,不適用立方星。螺線管中插入鐵芯可以增加磁場磁通量,并且結構簡單、功耗小,適用于立方星。對此,本文以螺線管電磁鐵作為電磁對接機構的設計基礎,設計了一種適用于1U立方星結構的電磁對接機構。
電磁對接機構由2部分組成,一部分為能夠產生對接驅動力的電磁裝置,另一部分為用于對接和鎖緊的對接端口。考慮到立方星尺寸限制,2部分均秉承結構簡單、占用空間小設計原則。電磁裝置采用含鐵芯的直流螺線管式電磁鐵結構,選擇軟磁材料1J50作為鐵芯,其具有低矯頑力和高磁導率、易于磁化和退磁等優勢,減少了由于剩磁原因對衛星姿控系統的影響。
螺線管電磁鐵直徑、長度、線圈匝數等主要通過衛星本身體積約束、功耗約束以及發熱平衡約束迭代設計獲得,主要設計過程如圖1所示。
首先,利用經驗公式(1)~式(4),獲得圓形銅導線基本參數:
(1)
(2)
(3)
(4)
式中:In為安匝數,I為線圈電流,n為線圈匝數;P為線圈額定功率;A0為線圈窗口截面積;lav為線圈平均長度;U為線圈電壓;Aa為線圈帶絕緣導線截面積;dd為線圈帶絕緣導線線徑。
其次,通過發熱平衡約束設計磁棒參數,磁棒參數包括磁芯材料、直徑、長度及繞線后的外徑。其中磁芯直徑由納衛星的重量和體積限制,長度由線圈長度確定,發熱方程為
Pt=a1Sa+a2SM
(5)
式中:Pt為發熱平衡功率;Sa和SM分別為與空氣和金屬接觸的散熱面;a1和a2分別為單位散熱面上所散出的功率,是由線圈厚度和類型得到的經驗值。
再次,基于上述約束,最終確定螺線管電磁鐵設計參數:磁芯直徑為10 mm,長度為97 mm。線圈直徑為0.65 mm,繞線長度為88 mm,線圈匝數為975±5,線圈厚度為5 mm。繞制完成的螺線管電磁鐵如圖2所示。
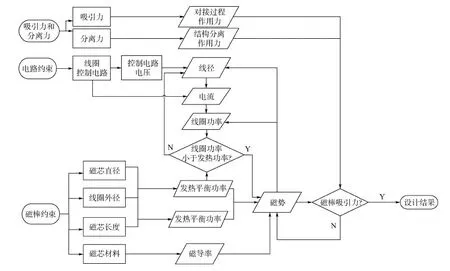
圖1 螺線管電磁鐵設計參數獲取過程Fig.1 Gaining process of solenoid electromagnet design parameters
電磁對接機構采用“類桿-錐式”對接方式,此類對接方式對比異體同構周邊式對接機構,結構更加簡單、質量較輕、使用可靠且應用廣泛,適用于納衛星。對接端口分為對接桿和接納錐2部分,分別安裝于主動衛星和被動衛星,如圖3所示。對接桿與接納錐通過螺線管電磁鐵所產生的磁力驅動近距離對接過程。采用“筆帽式”鎖緊方式進行鎖緊,對接桿外部有一圈球狀擋位,接納錐的內部有3個半球狀卡扣,當對接桿進入接納錐內部時,在軸向力的控制下,對接桿外部與接納錐內部可通過球面接觸實現對接鎖定與脫離。卡扣與擋位均由彈性材料制備,當對接桿進入接納錐后,對接桿上的擋位與接納錐內的卡扣相互接觸擠壓,發生彈性變形。變形后的擋位和卡扣在材料恢復力的作用下使對接桿上的擋位與接納錐內的卡扣相互夾緊。該鎖緊原理機械結構簡單、質量輕、體積小、對控制精度要求低,適用于納衛星,對接過程如圖4所示。
圖2 含鐵芯的螺線管電磁鐵Fig.2 Solenoid electromagnet with iron core
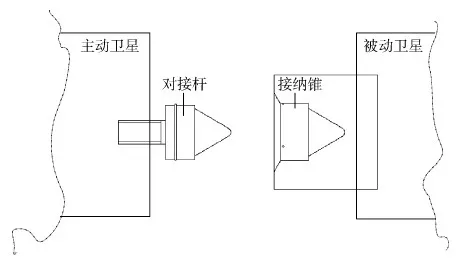
圖3 鎖緊機構示意圖Fig.3 Schematic diagram of locking mechanism
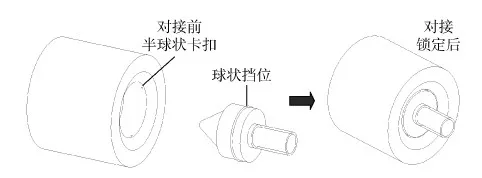
圖4 對接鎖緊過程Fig.4 Docking locking process
最后,基于自由度約束準則,采用3組對接端口分布于同一圓周設計布局,實現主動衛星與被動衛星之間6個自由度的動力學約束,如圖5所示,F為自由度。
綜上所述,基于螺線管電磁鐵、對接端口以及1U立方星優化布局3個方面的分析設計,實現了1U電磁對接機構的設計,如圖6所示。
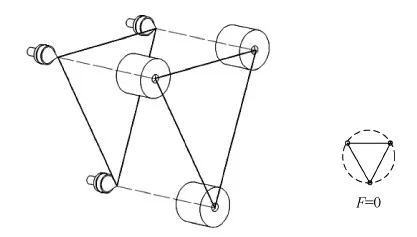
圖5 自由度約束設計Fig.5 Freedom degree constraint design
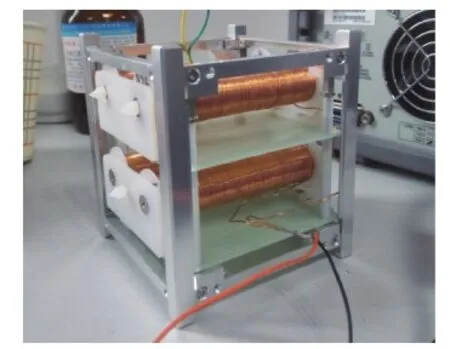
圖6 1U電磁對接機構實物圖Fig.6 Picture for 1U electromagnetic docking mechanism
2 電磁力/力矩模型簡化
2.1 通電螺線管模型的簡化
針對第1節電磁對接機構,對電磁力/力矩模型進行簡化,將有限長通電螺線管模型簡化為單匝線圈模型,通電線圈與通電螺線管模型如圖7所示。
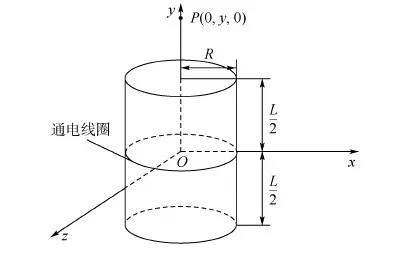
圖7 通電線圈與通電螺線管模型Fig.7 Electrified coil and solenoid model
對單匝線圈與通電螺線管在軸線上所產生的磁場進行對比分析。單個線圈軸線上磁場表達式為
(6)
通電螺線管軸線上磁場表達式為
(7)
式中:μ0=4π×10-7N/A2為真空磁導率;R為電流線圈的半徑;L為通電螺線管長度。
分析結果表明:在距離較遠時,兩者相差不大,在距通電螺線管端部中心距離d在0.2~1 m之間,可以認為兩者的比值c=B1/B2=0.2,如圖8所示。
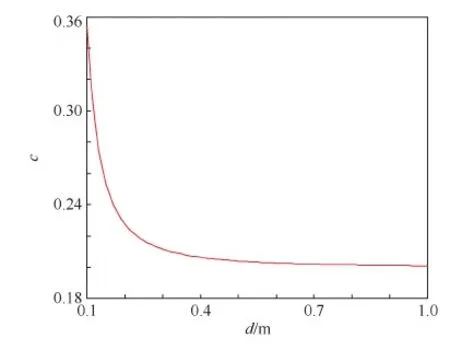
圖8 通電螺線管與單個線圈軸線上磁場比值Fig.8 Magnetic field ratio between electrified solenoid and single coil axis
2.2 精確模型和遠場模型
通過畢奧-薩伐爾定理,利用多重積分可得到精確的單個線圈電磁力模型,但該模型非解析,因此本文采用泰勒一階展開式進行簡化近似。電磁對接機構空間位置示意圖如圖9所示,a1、a2、a3、a4為航天器a的4個通電螺線管,b1、b2、b3、b4為航天器b的4個通電螺線管,d1為每一個螺線管間距,2個航天器間距相同。
精確電磁力和電磁力矩為
(8)
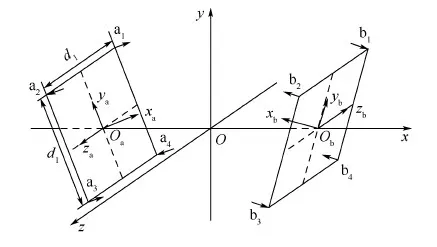
圖9 電磁對接機構空間位置示意圖Fig.9 Schematic diagram of spatial position for electromagnetic docking mechanism
式中:dla和dlb為線圈矢量微元;r為線圈微元到空間點的距離。
通過泰勒一階展開而簡化的遠場電磁力和電磁力矩為
(9)
式中:d為兩航天器的相對距離矢量,下標ba表示從航天器b指向航天器a;μ為磁矩矢量,下標a和b分別表示航天器a和航天器b。
為比較分析2種模型,本文從強度和角度2方面進行誤差特性分析,基本方程如式(10)~式(13)所示,其中Δ1和Δ2分別表示電磁力強度誤差和角度誤差,Δ3和Δ4分別表示電磁力矩強度誤差和角度誤差。
(10)
(11)
(12)
(13)
一方面,針對電磁力,對2種模型進行比較分析,仿真分析結果表明,電磁力強度以及角度的誤差相對于衛星之間距離呈現遞減趨勢(見圖10~圖13)。2個衛星的角度在10°以內時,在d≥0.1 m的條件下,強度和方位的誤差分別在2%和1°以內。則存在以下合理的假設:遠場電磁力模型成立的條件為d≥0.1 m。需要特別說明的是:α和β分別為2個螺線管線圈截面在y方向和z方向的初始夾角,坐標系的定義如圖9所示。
另一方面,針對電磁力矩模型,對其進行了同樣的誤差分析,結果表明,遠場模型的電磁力矩強度誤差隨著相對距離的減小而逐漸增大,呈現出與精確模型一樣的趨勢。2顆衛星的角度在10°以內時,當d≥0.1 m,強度誤差Δ3均小于3%。方位誤差的變化具有比較大的波動,但在距離滿足d≥0.1 m的條件下,誤差均小于1.5×10-6°。
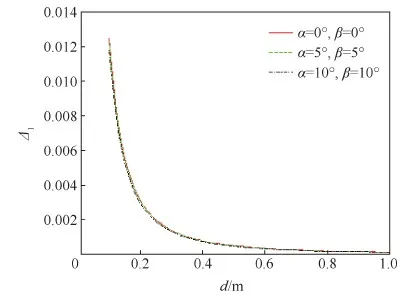
圖10 電磁力強度誤差與距離及角度的關系Fig.10 Change of strength error of electromagnetic force with distance and angle

圖11 電磁力角度誤差與距離及角度的關系Fig.11 Change of angle error of electromagnetic force with distance and angle
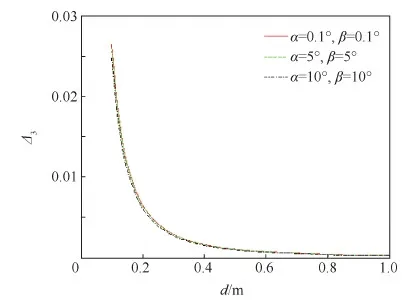
圖12 電磁力矩強度誤差與距離及角度的關系Fig.12 Change of strength error of electromagnetic moment with distance and angle
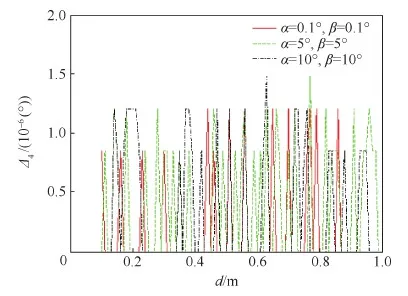
圖13 電磁力矩角度誤差與距離及角度的關系Fig.13 Change of angle error of electromagnetic moment with distance and angle
綜上分析,當對接距離大于0.1 m時,遠場模型與精確模型的誤差是在工程應用可接收范圍內,而本文設計的電磁對接機構,在完成對接情況下,中心距離恰為0.1 m,進而說明遠場模型適用于本文所設計的電磁對接機構。
3 鐵芯對螺線管電磁鐵的影響
由于理論推導的復雜性,在第2節分析中并沒有考慮鐵芯的影響,對此本文進一步通過數值仿真分析方法,對鐵芯的影響進行了分析。
圖14給出了Maxwell 3D仿真模型。分析結果表明(見圖15),單一螺線管在軸線方向磁場強度分布均勻,但對于含鐵芯的螺線管在軸線方向磁場強度峰值現象明顯,成對稱式分布。兩者電磁強度相差明顯,插入鐵芯的螺線管電磁強度顯著增加。
同時,為了定量的給出2種模型磁感應強度的不同, 本文對單個線圈和含鐵芯的通電螺線管進行了比較分析,分析結果如圖16所示。在距離對接中心較近時,兩者比值約在10-4量級;隨著距離的增加,2個模型的比值約在10-8量級。此分析結果可對遠場模型進行修正,彌補遠場模型沒有考慮鐵芯而產生的誤差。
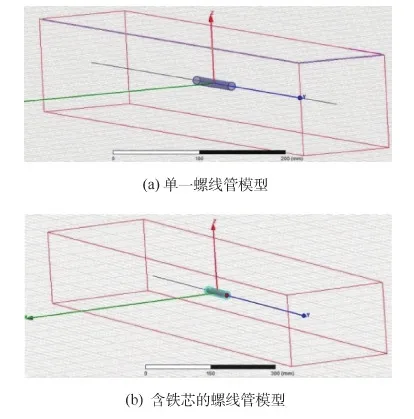
圖14 2種螺線管Maxwell 3D仿真模型Fig.14 Two kinds of Maxwell solenoid 3D simulation model
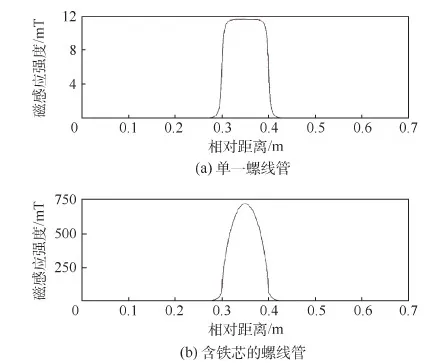
圖15 單一螺線管和含鐵芯螺線管軸線上磁感應強度分布Fig.15 Magnetic induction intensity distribution in axial direction for electrified solenoid with single solenoid and iron core
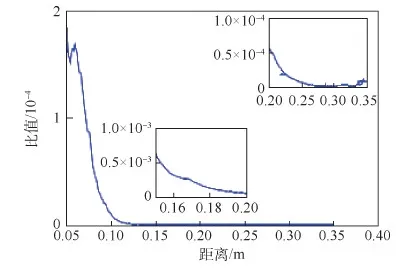
圖16 單個線圈與通電螺線管磁感應強度比較分析Fig.16 Magnetic induction intensity comparison analysis between single coil and electrified solenoid
4 結 論
1) 本文基于電磁原理,在立方星約束條件下,設計了一種1U立方星電磁對接機構。
2) 創新性提出了一種“筆帽式”鎖緊對接端口。
3) 通過對電磁力和力矩精確模型和遠場模型的比較分析,明確了遠場模型的范圍。
4) 進一步,利用數值仿真分析方法,給出了鐵芯對磁感應強度的影響,為理論分析的經驗糾正奠定了基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
