基于多普勒測(cè)向和信號(hào)強(qiáng)度測(cè)距原理的艦員落水報(bào)警定位裝置
2019-01-08 01:56:50,,
船海工程 2018年6期
,,
(1.海軍工程大學(xué) 艦船綜合試驗(yàn)訓(xùn)練基地,武漢 430033;2.海軍東海艦隊(duì),浙江 寧波 315812)
水面艦艇飛行甲板空間狹小,單位作業(yè)空間人員利用率高,需完成艦載機(jī)起飛、降落、再次出動(dòng)保障等。多艦員、多裝備、高強(qiáng)度并行作業(yè),艦員在不經(jīng)意間易發(fā)生落水事故,而由于單個(gè)艦員相對(duì)于飛行甲板體積小,發(fā)生落水事故后不易被察覺(jué)和發(fā)現(xiàn)。此外,當(dāng)水面艦艇發(fā)生災(zāi)害事故時(shí),更容易發(fā)生落水事故[1-3]。針對(duì)上述問(wèn)題,設(shè)計(jì)了一種由落水信號(hào)發(fā)射器、無(wú)線信號(hào)接收器和信號(hào)定位器組成,實(shí)現(xiàn)信號(hào)發(fā)送、狀態(tài)顯示和信號(hào)定位等功能,保障艦員落水快速援救的艦員落水報(bào)警定位裝置。
1 總體設(shè)計(jì)
裝置的整體結(jié)構(gòu)見(jiàn)圖1。當(dāng)甲板艦員落水后,攜帶在艦員身上的發(fā)射器在海水或手動(dòng)驅(qū)動(dòng)的作用下迅速發(fā)射無(wú)線信號(hào),安裝在艦橋的接收器啟動(dòng)并發(fā)出聲音報(bào)警信號(hào),LED屏上顯示發(fā)射器的初始信息,確定艦員落水的ID號(hào)及身份,安裝在艦橋甲板上的定位天線接收信號(hào)后也迅速在定位器上顯示艦員落水的定位信息,救援隊(duì)員通過(guò)定位器實(shí)施定位搜救。

圖1 裝置的整體結(jié)構(gòu)
2 硬件設(shè)計(jì)
2.1 信號(hào)發(fā)射器

圖2 落水信號(hào)發(fā)射器工作原理
2.2 信號(hào)接受器
落水信號(hào)接收器的高頻通信模塊將無(wú)線信號(hào)進(jìn)行解調(diào),形成數(shù)字信號(hào),經(jīng)微處理器模塊向落水信號(hào)接收器主機(jī)輸出人員代碼信息,落水信號(hào)接收器主機(jī)實(shí)現(xiàn)報(bào)警信息的顯示[7-8]。工作原理見(jiàn)圖3。

圖3 信號(hào)接受器工作原理
落水信號(hào)接收器由天線、信號(hào)轉(zhuǎn)換盒、主機(jī)(含液晶顯示器)、電源轉(zhuǎn)換器組成。當(dāng)接收器接收到發(fā)射器的信號(hào)后,壓電蜂鳴器將發(fā)出報(bào)警信號(hào),信號(hào)強(qiáng)度為100 dB;當(dāng)發(fā)射器關(guān)閉或者發(fā)射器發(fā)送“清除”指令到接收器,或者操作者在LED屏上啟動(dòng)“靜音”按鈕后,壓電蜂鳴器自動(dòng)關(guān)閉。液晶顯示屏是救援艦員和艦員落水間的直接交互界面(見(jiàn)圖4),分為待機(jī)狀態(tài)和工作狀態(tài)兩種工作模式。待機(jī)狀態(tài)是指落水事故發(fā)生前,接收器時(shí)刻處于警戒搜索的狀態(tài),工作狀態(tài)是指落水事故發(fā)生后,接收器搜索工作狀態(tài);此時(shí)液晶顯示屏上顯示失事艦艇的信息,包括艦艇舷號(hào),落水人員的姓名、軍銜以及接受信號(hào)的計(jì)時(shí)等。如果是多艘艦艇編隊(duì)航行,相鄰艦艇也可搜索到失事艦艇艦員落水人員的信息,在本艦的接收器上顯示相關(guān)信息。無(wú)論是失事艦艇還是相鄰艦艇的接收器液晶顯示屏上都有兩個(gè)輔助信息:發(fā)射器電源電量信息和接收信號(hào)強(qiáng)度指示信息。若艦船已經(jīng)接入GPS或北斗信號(hào),則界面將顯示接入GPS或北斗信號(hào)人員落水信息界面。

圖4 落水接收器液晶顯示屏工作界面
2.3 信號(hào)定位器
信號(hào)定位器有固定式和便攜式兩種。固定式安裝在艦艇駕駛室,便攜式由救援艦員便攜手持。信號(hào)工作原理見(jiàn)圖5。定位器高頻解調(diào)板解調(diào)方位天線收到的載波信號(hào),由信號(hào)定位器核心處理板分析解調(diào)信號(hào)。如果信號(hào)中包含滿幅載波,則表明有人落水,此時(shí)定位器核心處理板控制天線電磁轉(zhuǎn)動(dòng),以獲得確切的方位和距離信號(hào),并將此信號(hào)處理成可供顯示板顯示的信號(hào)送其顯示。此外,解調(diào)信號(hào)中還包含求救報(bào)警聲音信號(hào),定位器核心處理板將其信號(hào)放大處理后驅(qū)動(dòng)報(bào)警喇叭。

圖5 信號(hào)定位器工作原理
信號(hào)定位器的操作在主機(jī)面板上進(jìn)行,主機(jī)面板上有:方位測(cè)向(DF)顯示器、頻率選擇鍵、揚(yáng)聲器音量調(diào)節(jié)、接收信號(hào)強(qiáng)度指示器、靠近目標(biāo)信號(hào)指示器、復(fù)原按鈕、頻率信號(hào)檢測(cè)鍵、開(kāi)/關(guān)、船艏指向箭頭等,提供顯示和艦員操作。
1)方位測(cè)向顯示器,顯示落水人員的方向。
2)頻率選擇鍵,選擇信標(biāo)頻率。
驅(qū)動(dòng)形式 ....................................................中置后驅(qū)
3)揚(yáng)聲器音量調(diào)節(jié)鍵,調(diào)節(jié)聲音的大小。
4)接收信號(hào)強(qiáng)度指示器,指示離落水艦員的大致距離。
5)靠近目標(biāo)信號(hào)指示器,指示已經(jīng)靠近落水艦員。
6)復(fù)原按鈕,搜救結(jié)束后恢復(fù)初始設(shè)定數(shù)值。
7)頻率信號(hào)檢測(cè)鍵, 檢測(cè)收到的信號(hào)是否為本系統(tǒng)的落水信號(hào)發(fā)射器發(fā)出的信號(hào)。
8)電源開(kāi)/關(guān),開(kāi)啟關(guān)閉主機(jī)和LED亮度調(diào)節(jié)。
9)艦艏指向,標(biāo)識(shí)船艏方向。
3 軟件設(shè)計(jì)
軟件設(shè)計(jì)包括4個(gè)部分,艦員代碼通信系統(tǒng)軟件的設(shè)計(jì)和編程,落水信號(hào)發(fā)射器軟件的設(shè)計(jì)和編程,落水信號(hào)接收器軟件的設(shè)計(jì)和編程,信號(hào)定位器軟件的設(shè)計(jì)和編程。核心是信號(hào)定位器軟件設(shè)計(jì),其采用IARFORNEC作為開(kāi)發(fā)環(huán)境,采用C語(yǔ)言編制,用于接收顯示落水信號(hào)發(fā)射器發(fā)來(lái)的定位定向信號(hào)信息,設(shè)計(jì)流程見(jiàn)圖6。
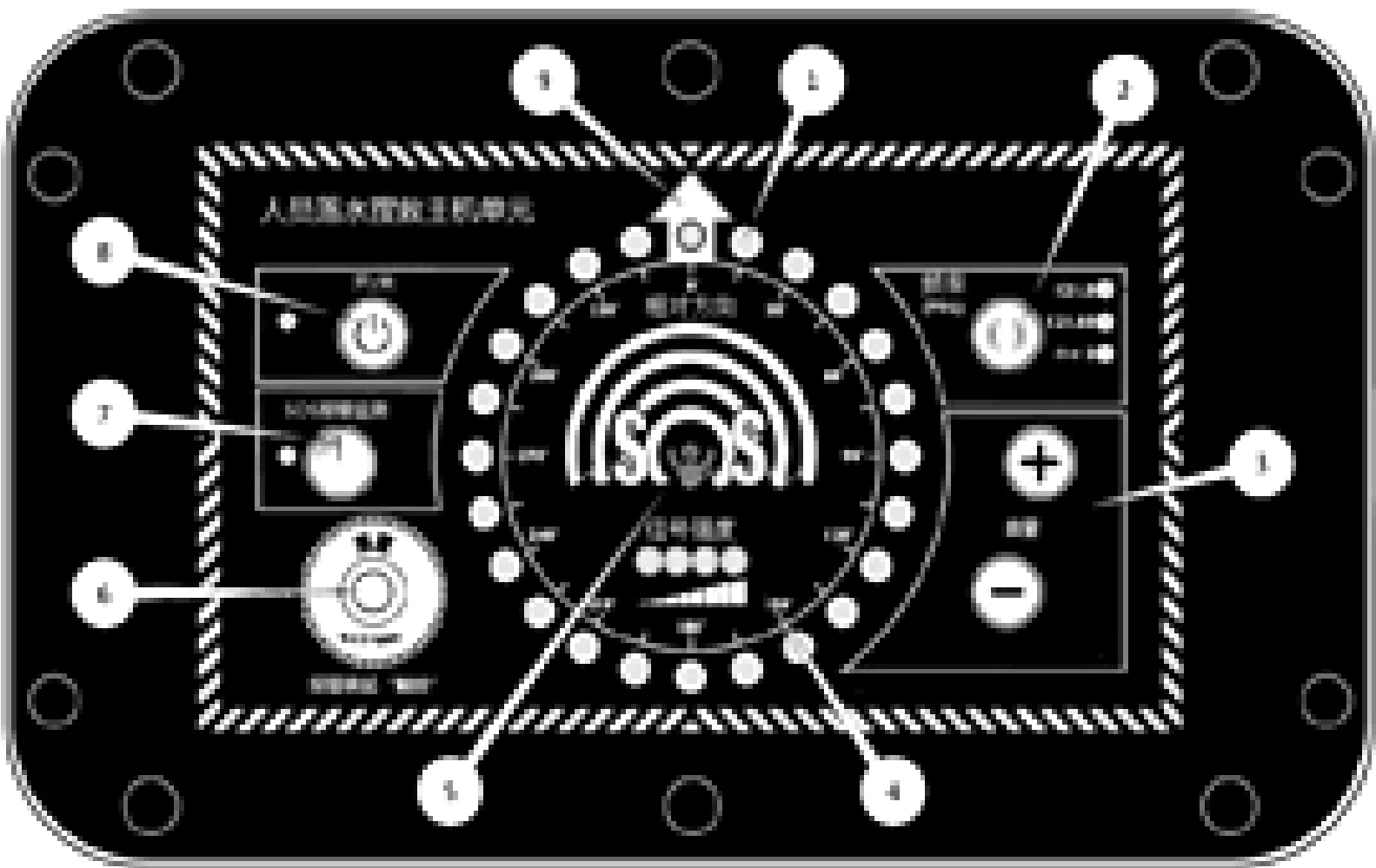
圖6 信號(hào)定位器軟件設(shè)計(jì)流程
4 測(cè)向和定位算法
4.1 多普勒測(cè)向算法
多普勒測(cè)向機(jī)是指由單一天線旋轉(zhuǎn),利用接收機(jī)產(chǎn)生的多普勒頻移進(jìn)行測(cè)向的設(shè)備[9-10]。如果天線沿著一個(gè)直徑D的圓形軌道運(yùn)動(dòng),旋轉(zhuǎn)角頻率為ω的多普勒測(cè)向機(jī),瞬時(shí)輸出電壓u(t)。
u(t)=A(t)cos[ωct+φ(t)+ηcos(ωRt-θ)]
(1)
式中:A(t)為接收信號(hào)的幅度;ωc為載波信號(hào)頻率;φ(t)為調(diào)制信號(hào)的瞬時(shí)相位;η=(πDcosγ)/λ,γ為仰角,λ為波長(zhǎng);ωR為測(cè)向天線旋轉(zhuǎn)的角頻率;θ為方位角。對(duì)于窄帶信號(hào),特別是A(t)=A,φ(t)=φT,使用一個(gè)頻率解調(diào)器進(jìn)行處理,解調(diào)器的輸出信號(hào)φ(t)。
φ(t)=ωct+φT(t)+ηcos(ωRt-θ)
(2)
在理想的頻率調(diào)制時(shí),通過(guò)相位輸出信號(hào)φ(t)求時(shí)間導(dǎo)數(shù),可求解瞬時(shí)頻率ω(t)。
(3)
濾除直流分量ωc后得到的解調(diào)信號(hào)SD(t)。
SD(t)=-ηωRsin(ωRt-θ)
(4)
對(duì)式(4)信號(hào)在特定時(shí)間進(jìn)行A/D采樣,就可計(jì)算出仰角γ和來(lái)波的方位角θ。
4.2 信號(hào)強(qiáng)度測(cè)距算法
采用基于信號(hào)強(qiáng)度SSOA的測(cè)距原理進(jìn)行落水艦員位置定位,然后根據(jù)落水艦員的方位角和艦艇自身的位置坐標(biāo)確定落水艦員的位置范圍。由于海面對(duì)電波的傳輸存在干擾,接收信號(hào)的強(qiáng)度會(huì)受到影響,有時(shí)候表現(xiàn)為信號(hào)強(qiáng)度加大,有時(shí)候則是減弱[11-12]。通過(guò)對(duì)某一個(gè)環(huán)境進(jìn)行多次實(shí)測(cè),得到這一環(huán)境下的傳播距離和路徑損耗的關(guān)系,并且歸納出“距離-損耗”模型,一般形式如下。
(5)
式中:d0為參考距離;P0為距離為d0時(shí)接收到的信號(hào)強(qiáng)度;d是實(shí)際距離;P為接收信號(hào)強(qiáng)度;n為路徑損耗系數(shù);ξ是遮蔽因子。該因子的均值為0,均方差為σ的正態(tài)隨機(jī)變量,與傳播距離無(wú)關(guān),即相同的傳播距離,可能被測(cè)到的損耗完全不同,甚至相差幾倍。因此,對(duì)(5)式進(jìn)行修正:
(6)

(7)
由“距離-損耗”模型可以把迭代過(guò)程中得到的虛擬的距離轉(zhuǎn)化為虛擬的信號(hào)接收強(qiáng)度,正確選擇λ值,可以使估計(jì)位置越來(lái)越精確。迭代終止的條件為找到最小的自然數(shù)K,使之滿足:
(8)
即落水目標(biāo)和參考點(diǎn)之間的距離收斂,可以用ML算法來(lái)進(jìn)行較為準(zhǔn)確的估計(jì),在實(shí)際應(yīng)用過(guò)程中,由于計(jì)算出的距離存在偏差,故將距離劃分為4個(gè)范圍,對(duì)應(yīng)4種信號(hào)強(qiáng)度范圍,顯示在方位定位器主機(jī)上。
4.3 海試試驗(yàn)
為測(cè)試裝置測(cè)向和測(cè)距的能力,首先將信號(hào)發(fā)生器置于固定位置水域,采用GPS測(cè)量出落水信號(hào)發(fā)射器和接收機(jī)之間的距離和角度,然后當(dāng)信號(hào)發(fā)射器發(fā)射求救信號(hào)時(shí),記錄信號(hào)發(fā)射器相對(duì)接收機(jī)艏向的方向角度和信號(hào)強(qiáng)弱度。
4.3.1 試驗(yàn)環(huán)境要求
落水信號(hào)發(fā)射器與測(cè)向器之間無(wú)連續(xù)建筑物遮擋;落水信號(hào)發(fā)射器與測(cè)向器之間的海拔高度在±500 m內(nèi);試驗(yàn)場(chǎng)地內(nèi)的電磁信號(hào)場(chǎng)強(qiáng)≤50 mV/m。
4.3.2 設(shè)備安裝要求
落水信號(hào)發(fā)射器安裝載體位移速度5 km/h;報(bào)警信號(hào)接收器和測(cè)向器安裝載體速度≥5 kn;報(bào)警信號(hào)接收器和測(cè)向器的安裝高度≤10 m。海試試驗(yàn)結(jié)果見(jiàn)表1。
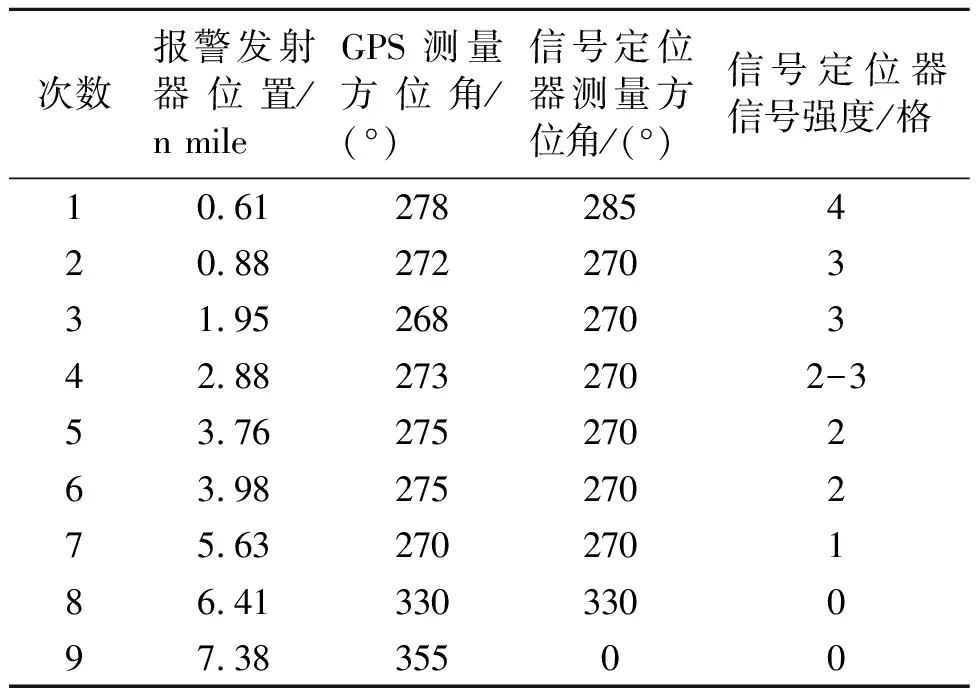
表1 海試試驗(yàn)結(jié)果
從海試測(cè)試結(jié)果看,信號(hào)方位測(cè)量誤差在1%以內(nèi),落水報(bào)警裝置的最大試驗(yàn)范圍為6 n mile。
5 結(jié)論
落水報(bào)警裝置為國(guó)內(nèi)艦船首次采用無(wú)線信號(hào)發(fā)射器、接收器和定位器閉環(huán)設(shè)計(jì)模式,采用基于多普勒測(cè)向和信號(hào)強(qiáng)度測(cè)距原理的數(shù)字編碼和雙頻道通信技術(shù),實(shí)現(xiàn)報(bào)警和定位功能。采用嵌入式軟件架構(gòu)設(shè)計(jì),實(shí)現(xiàn)顯示當(dāng)前落水人員的信息,滾動(dòng)顯示當(dāng)前多個(gè)落水人員的信息,查詢注冊(cè)艦員的歷史信息,自動(dòng)判別和顯示收到的頻率信號(hào),具有添加、修改和刪除注冊(cè)艦員信息等多項(xiàng)功能。國(guó)內(nèi)現(xiàn)裝備在落水人員報(bào)警和定位的工作原理上都是采用GPS系統(tǒng)實(shí)現(xiàn)人員的報(bào)警和定位。該定位信號(hào)保密性較差,易暴露搜救船自身的方位,而本裝置采用無(wú)線信號(hào)被動(dòng)接受方式,具有較高的隱蔽性,與美國(guó)等國(guó)家海軍采用同樣的工作原理和方式,作用距離為6 n mile,達(dá)到國(guó)外同類產(chǎn)品水平。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中外會(huì)展(2014年4期)2014-11-27 07:46:46
環(huán)球時(shí)報(bào)(2010-02-11)2010-02-11 13:34:15
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
