踝關(guān)節(jié)康復(fù)裝置的設(shè)計與分析*
2019-01-10 08:59:50王中長
機(jī)械制造 2018年12期
□ 王中長
濱州學(xué)院 機(jī)電工程學(xué)院 山東濱州 256603
1 研究背景
踝關(guān)節(jié)是人體既靈活又穩(wěn)定的負(fù)重關(guān)節(jié),屬于屈戍關(guān)節(jié),由脛骨遠(yuǎn)端、距骨、腓骨遠(yuǎn)端及周圍韌帶組成。日常生活中的行走、跳躍活動,主要依靠踝關(guān)節(jié)的跖屈、背屈運(yùn)動完成。在踝關(guān)節(jié)正常的屈伸運(yùn)動中,常伴有內(nèi)翻與外翻兩個動作。當(dāng)踝關(guān)節(jié)不能主動運(yùn)動時,會造成患者運(yùn)動困難,從而導(dǎo)致患者長期臥床、全身截癱,甚至?xí)鹌渌鼑?yán)重的并發(fā)癥。如果能有一款康復(fù)裝置幫助踝關(guān)節(jié)在被動情況下跖屈40~50°、背屈20~30°、內(nèi)翻 35~40°、外翻 15°,并能根據(jù)患者的個體情況設(shè)置不同的運(yùn)動角度與時間,進(jìn)行連續(xù)往返式運(yùn)動,這對踝關(guān)節(jié)不能或較難進(jìn)行主動活動的病人而言具有現(xiàn)實(shí)意義,并能防止踝關(guān)節(jié)僵硬、下肢肌肉萎縮[1]。可見,開展踝關(guān)節(jié)康復(fù)裝置的研究具有重要意義。
2 裝置機(jī)械結(jié)構(gòu)
2.1 機(jī)械結(jié)構(gòu)功能
踝關(guān)節(jié)康復(fù)裝置的機(jī)械結(jié)構(gòu)需要實(shí)現(xiàn)以下功能:①永磁直流電機(jī)高轉(zhuǎn)速與康復(fù)裝置低速運(yùn)行間的大傳動比轉(zhuǎn)換;② 人體腳踝的跖屈、背屈運(yùn)動,以及內(nèi)、外翻運(yùn)動,并且兩個自由度的運(yùn)動相互獨(dú)立、互不產(chǎn)生干涉;③患者在坐、臥姿勢下均可進(jìn)行持續(xù)被動康復(fù)訓(xùn)練。
為了便于移動和放置,康復(fù)裝置的體積不能太大,按照600 mm×500 mm×200 mm的尺寸設(shè)計康復(fù)裝置整體結(jié)構(gòu)[2]。
2.2 驅(qū)動電機(jī)和減速器
踝關(guān)節(jié)康復(fù)裝置的動力源應(yīng)盡可能滿足運(yùn)行平穩(wěn)、機(jī)械特性硬、控制簡單、環(huán)保的要求,而且其輸出扭矩測量系統(tǒng)的成本要低。另外,動力源和扭矩測量系統(tǒng)的體積和質(zhì)量不能太大,以滿足康復(fù)裝置體積小、攜帶安置方便的特點(diǎn)。綜合考慮成本、體積和控制方法等因素,決定采用永磁式有刷直流電機(jī)作為踝關(guān)節(jié)康復(fù)裝置的驅(qū)動電機(jī)[3]。
行星齒輪減速器與其它傳動裝置相比,具有體積小、質(zhì)量輕、結(jié)構(gòu)緊湊、傳動比穩(wěn)定、工作可靠、承載能力高、傳動效率高等突出優(yōu)點(diǎn),并且價格較低,使用壽命長,可以與直流電機(jī)裝配在一起,組成直流減速電機(jī)。另外,即使在沒有輸入信號的情況下,也能保證減速器輸出軸的靜止?fàn)顟B(tài),實(shí)現(xiàn)康復(fù)裝置達(dá)到預(yù)設(shè)角度值時停滯一定時間的功能要求。
2.3 跖屈、背屈和內(nèi)外翻運(yùn)動機(jī)構(gòu)
如果采用一個驅(qū)動電機(jī),通過機(jī)械傳動裝置可以實(shí)現(xiàn)跖屈、背屈,以及內(nèi)、外翻運(yùn)動,但是無法做到兩者的相互獨(dú)立、互不干涉,即當(dāng)設(shè)定一個自由度的擺動角度和轉(zhuǎn)動速度時,另外一個自由度的擺動角度和轉(zhuǎn)動速度也隨之確定。因此,采用兩個驅(qū)動電機(jī),通過各自的傳動裝置實(shí)現(xiàn)踝關(guān)節(jié)康復(fù)裝置兩個自由度的獨(dú)立運(yùn)動[4]。對兩個運(yùn)動進(jìn)行布局時發(fā)現(xiàn),實(shí)現(xiàn)某一自由度的直流電機(jī)、機(jī)械傳動裝置和執(zhí)行部件等整套裝置,必須安裝在另一自由度的執(zhí)行部件上。考慮到人體足部跖屈、背屈運(yùn)動的負(fù)載力矩比內(nèi)、外翻運(yùn)動大,將跖屈、背屈運(yùn)動的驅(qū)動電機(jī)和傳動裝置固定在康復(fù)裝置支座上,將內(nèi)、外翻運(yùn)動的整套裝置安裝在跖屈、背屈運(yùn)動的執(zhí)行部件上,實(shí)現(xiàn)跖屈、背屈,以及內(nèi)、外翻運(yùn)動的合理疊加[6]。康復(fù)裝置整體結(jié)構(gòu)如圖1所示。
第一直流減速電機(jī)通過固定板安裝在支座上,其輸出軸通過聯(lián)軸器與第一旋轉(zhuǎn)軸相連,將電機(jī)的旋轉(zhuǎn)運(yùn)動傳遞給腳踏板,帶動腳踏板來回擺動,實(shí)現(xiàn)康復(fù)裝置的跖屈、背屈運(yùn)動。第二直流減速電機(jī)通過L板安裝在底部固定板上,用第二軸承座將腳踏板安裝在底部固定板的另一側(cè),由第一齒輪和第二齒輪嚙合實(shí)現(xiàn)第二直流減速電機(jī)到腳踏板的運(yùn)動傳遞,使內(nèi)、外翻運(yùn)動合理地疊加在跖屈、背屈運(yùn)動的執(zhí)行部件上。此時,兩個自由度滿足了相互獨(dú)立、互不干涉的要求。由于內(nèi)外翻運(yùn)動的整體旋轉(zhuǎn)角度小于60°,為了便于尺寸布局合理,結(jié)構(gòu)緊湊,將第二齒輪做成扇型結(jié)構(gòu),縮短腳踏板到底部固定板的距離,提高運(yùn)動的穩(wěn)定性,壓縮腳踏板側(cè)板方向的體積,使康復(fù)裝置更美觀、合理。為了使患者在坐、臥姿勢下均可使用康復(fù)裝置進(jìn)行持續(xù)被動運(yùn)動,將支撐腿做成伸縮結(jié)構(gòu),即通過調(diào)節(jié)支撐腿上螺母的位置,改變支撐腿的總長度,使小腿托處于不同的傾斜角度,從而滿足患者需求。
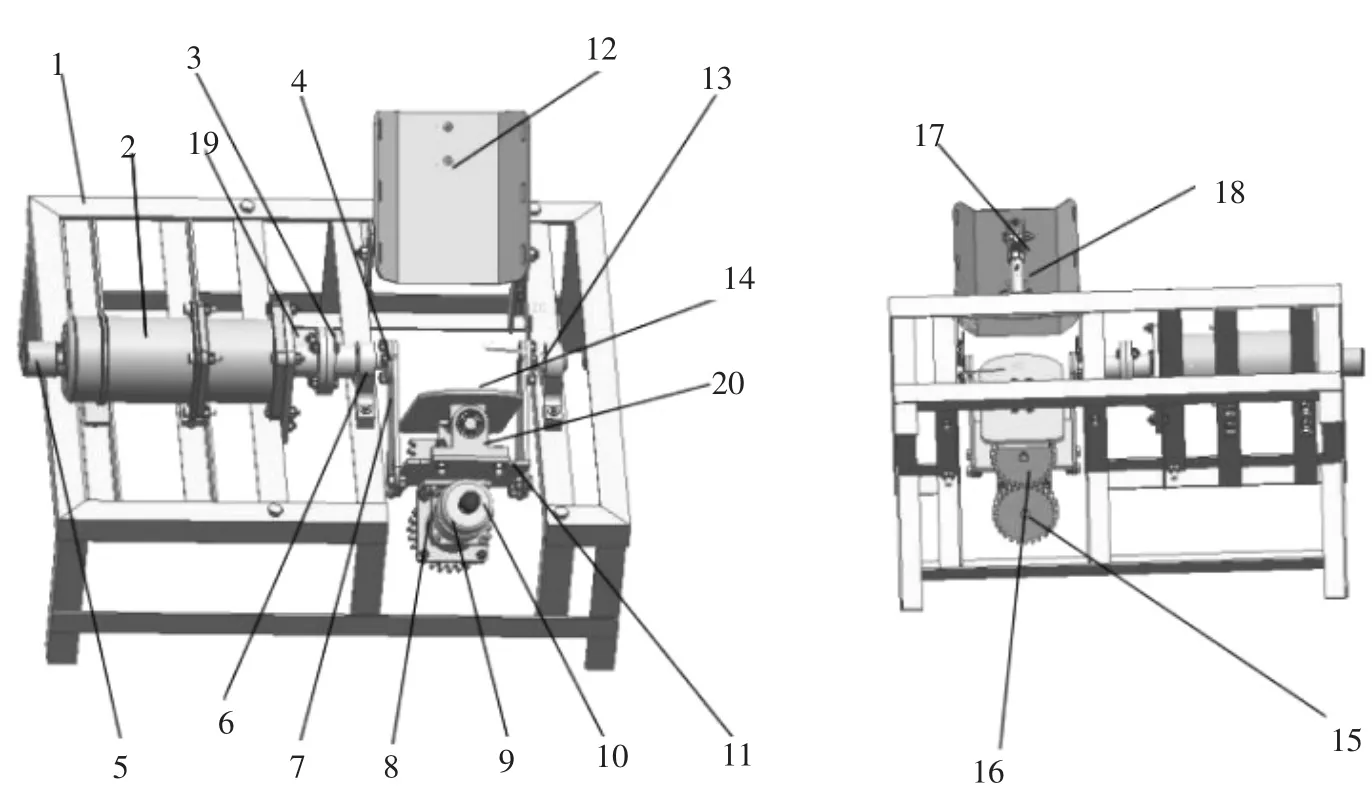
▲圖1 康復(fù)裝置整體結(jié)構(gòu)
3 裝置運(yùn)動仿真與分析
UG軟件的運(yùn)動分析模塊可以進(jìn)行機(jī)構(gòu)的運(yùn)動干涉分析,跟蹤零件的運(yùn)動軌跡,分析機(jī)構(gòu)中零件的位移、速度、加速度、作用力、反作用力和力矩等,從而通過修改分析結(jié)果,得出合理且滿足要求的機(jī)構(gòu)[7]。通過應(yīng)用UG軟件的運(yùn)動分析模塊,檢查踝關(guān)節(jié)康復(fù)裝置運(yùn)動過程中零部件之間的干涉情況,分析旋轉(zhuǎn)角度,可以有效避免在加工及實(shí)地操作時發(fā)生重大失誤。
3.1 仿真模型
仿真模型創(chuàng)建六個連桿,第一旋轉(zhuǎn)軸為連桿L001,側(cè)板、L板、第二直流減速電機(jī)、第二編碼器、底部固定板及第二軸承座固連為連桿L002,第二旋轉(zhuǎn)軸為連桿L003,第一齒輪為連桿L004,第二齒輪為連桿L005,腳踏板及相關(guān)機(jī)構(gòu)為連桿L006。同時根據(jù)連接關(guān)系創(chuàng)建六個運(yùn)動副,連桿L001為旋轉(zhuǎn)副J001并加驅(qū)動,連桿L002為旋轉(zhuǎn)副J002并咬合連桿L001,連桿L003為旋轉(zhuǎn)副J003并咬合連桿L002,連桿L004為旋轉(zhuǎn)副J004并加驅(qū)動,連桿L005為旋轉(zhuǎn)副J005,連桿L006為旋轉(zhuǎn)副J006并咬合連桿L005。在傳動副中選擇齒輪副,第一個運(yùn)動副選擇J004,第二個運(yùn)動副選擇J005,比率為 1。
3.2 干涉分析
利用封裝選項(xiàng)下的干涉項(xiàng)檢查運(yùn)動干涉,由檢查分析可知,腳踏板與小腿托為90°夾角,作為運(yùn)動初始位置,在背伸 20~30°、跖屈40~50°中沒有干涉。內(nèi)、外翻運(yùn)動中,腳踏板與底部固定板發(fā)生干涉,且運(yùn)動范圍為23.3°,不滿足內(nèi)翻35~40°的要求。經(jīng)過結(jié)構(gòu)優(yōu)化,內(nèi)、外翻運(yùn)動范圍為54°,滿足腳踏板的運(yùn)動范圍。
3.3 運(yùn)動分析
康復(fù)裝置以1 r/min旋轉(zhuǎn)時,跖屈、背屈運(yùn)動一周的角度曲線如圖2所示。
從圖2中可以看出,0~5 s從初始位置到達(dá)背伸30°,5~10 s從背伸 30°回到初始位置,10~17.88 s 從初始位置到達(dá)跖屈 50°,17.88~25.66 s 從跖屈 50°回到初始位置。
康復(fù)裝置以1 r/min速度旋轉(zhuǎn)時,內(nèi)、外翻運(yùn)動一周的角度曲線如圖3所示。
從圖3中可以看出,0~5 s從初始位置到達(dá)外翻15°,5~10 s從外翻 15°回到初始位置,10~23.33 s 從初始位置到達(dá)內(nèi)翻 40°,23.33~36.66 s 從內(nèi)翻 40°回到初始位置。
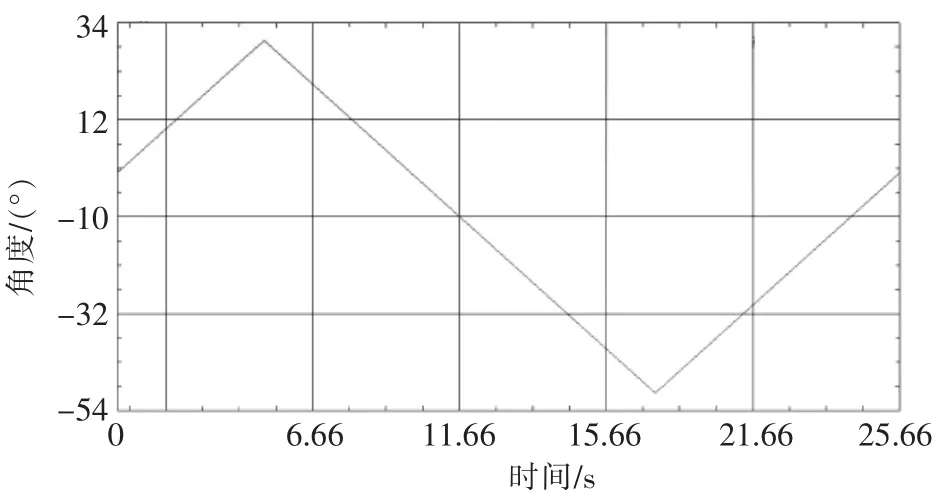
▲圖2 跖屈、背屈運(yùn)動一周角度變化曲線
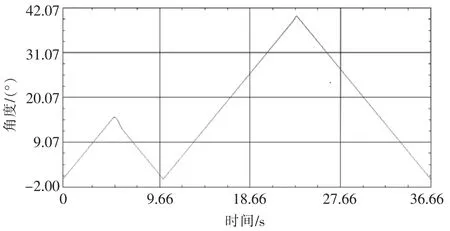
▲圖3 內(nèi)、外翻運(yùn)動一周角度變化曲線
4 第一旋轉(zhuǎn)軸有限元分析
第一旋轉(zhuǎn)軸結(jié)構(gòu)的可靠性對于踝關(guān)節(jié)康復(fù)裝置能否正常運(yùn)轉(zhuǎn)而言至關(guān)重要,而且第一旋轉(zhuǎn)軸也是重要的受力元件。應(yīng)用ANSYS軟件對第一旋轉(zhuǎn)軸進(jìn)行有限元分析,通過等效應(yīng)力云圖與位移變形云圖分析應(yīng)力集中對軸強(qiáng)度及變形的影響,以此為依據(jù)判斷強(qiáng)度和剛度,從而提高方案設(shè)計的可靠性[8]。
4.1 有限元模型
將軸的UG三維模型導(dǎo)入ANSYS軟件,完成線框模式的轉(zhuǎn)換。根據(jù)有限元和結(jié)構(gòu)分析理論可知,用三維實(shí)體單元來描述復(fù)雜實(shí)體更能反映實(shí)際狀況。由于六面體單元在劃分時要求結(jié)構(gòu)比較規(guī)則,對軸進(jìn)行六面體網(wǎng)格的自動劃分比較困難,而用四面體單元劃分三維結(jié)構(gòu)比較靈活,可以逼近較復(fù)雜的幾何形狀,因此采用四面體單元Solid45。這一單元為8節(jié)點(diǎn)單元,每個節(jié)點(diǎn)有三個沿X、Y、Z方向平移的自由度。每個四面體單元都具有塑性、蠕變、膨脹、應(yīng)力強(qiáng)化和大變形能力[9]。
軸的材料采用45號鋼,彈性模量為210 GPa,泊松比為0.28,密度為7.8×103kg/m3,屈服強(qiáng)度為355 MPa,安全因數(shù)為 2[10]。網(wǎng)格劃分采用智能網(wǎng)格劃分,第一旋轉(zhuǎn)軸劃分產(chǎn)生節(jié)點(diǎn)總數(shù)為6 944個,單元總數(shù)為31 962個。第一旋轉(zhuǎn)軸網(wǎng)格劃分如圖4所示。
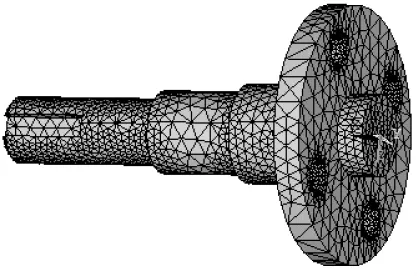
▲圖4 第一旋轉(zhuǎn)軸網(wǎng)格劃分
4.2 約束及載荷
針對第一旋轉(zhuǎn)軸的具體結(jié)構(gòu),進(jìn)行約束分析。因?yàn)檩S向由軸肩約束,所以在軸肩處施加移動約束。因?yàn)槭庆o力分析,可以認(rèn)為軸的瞬間是固定不動的,所以在軸承端施加全約束。
第一旋轉(zhuǎn)軸動力從左端平鍵槽輸入,計算得輸入轉(zhuǎn)矩為40 N·m。加載采用軟件內(nèi)力的設(shè)置指令,在平鍵槽面上各個節(jié)點(diǎn)施加集中應(yīng)力[11]。
軸的材料為45號鋼,安全因數(shù)為2,其許用強(qiáng)度為177.5 MPa。
4.3 分析結(jié)果
第一旋轉(zhuǎn)軸的總位移云圖如圖5所示。由圖5可知,軸的總位移從零件的右端向左端存在由小變大的趨勢,這與加載部位和約束位置有關(guān)。在實(shí)施全約束的軸承端及螺栓孔內(nèi)徑處位移最小,為0~2.74×10-10mm。軸的最大位移發(fā)生在與聯(lián)軸器相連的軸端,最大為2.47×10-8mm,主要由扭轉(zhuǎn)所造成。從剛度方面考慮,軸的整體變形很小,滿足剛度設(shè)計要求。
第一旋轉(zhuǎn)軸的等效應(yīng)力云圖如圖6所示。由圖6可知,在軸肩過渡尺寸變化處,存在一定的應(yīng)力集中現(xiàn)象,最大值為5.836 MPa,小于材料的許用應(yīng)力(177.5 MPa),說明材料抗破壞能力還具有較大的潛力。
5 結(jié)束語
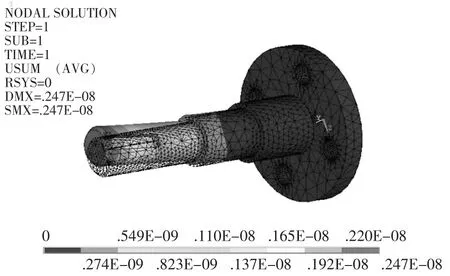
▲圖5 第一旋轉(zhuǎn)軸總位移云圖
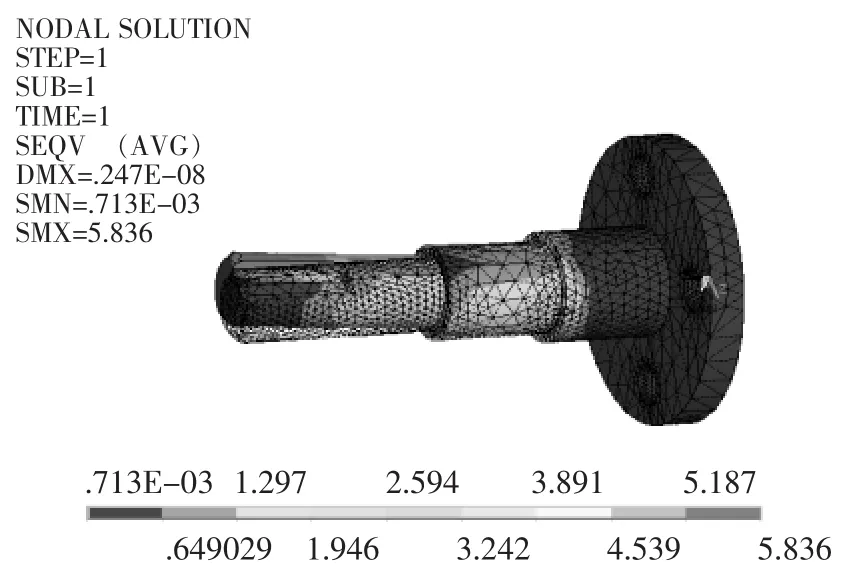
▲圖6 第一旋轉(zhuǎn)軸等效應(yīng)力云圖
為滿足踝關(guān)節(jié)康復(fù)裝置體積小、質(zhì)量輕、攜帶安置方便、工作穩(wěn)定和成本低等特點(diǎn),基于UG軟件建立了踝關(guān)節(jié)康復(fù)裝置的三維模型。在這一模型的基礎(chǔ)上,進(jìn)行了踝關(guān)節(jié)康復(fù)裝置的運(yùn)動仿真與分析,對發(fā)生干涉的機(jī)構(gòu)進(jìn)行優(yōu)化,仿真結(jié)果滿足踝關(guān)節(jié)的運(yùn)動范圍要求。應(yīng)用ANSYS軟件對踝關(guān)節(jié)康復(fù)裝置第一旋轉(zhuǎn)軸進(jìn)行有限元分析,通過線性靜態(tài)分析,從強(qiáng)度方面考慮,軸的最大應(yīng)力值遠(yuǎn)小于許用應(yīng)力,強(qiáng)度滿足使用要求。從剛度方面考慮,軸的整體變形很小,整體而言,軸的剛度滿足使用要求。有限元分析為康復(fù)裝置中軸的可靠運(yùn)行提供了依據(jù)。
猜你喜歡
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
特別健康(2018年2期)2018-06-29 06:13:44
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:33:14
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27