
基于智能手機的工業機器人控制技術研究
2019-01-10 06:57:52郭劉飛徐志業王艷杰周凱莉孫碩碩
科技視界 2019年36期
郭劉飛 徐志業 王艷杰 周凱莉 孫碩碩


【摘 要】隨著智能機器的發展,人類的生活、生產水平都有了不同的提高。本設計是基于智能手機的智能視頻載物平衡小車,解決現有智能循跡避障機器人無線傳輸的局限性問題,可以為地域探索和危險地帶緊急搶險提供很大的資源,在第一時間為消防人員進一步做搶險方案提供數據,也可用于高輻射車間的物品運輸。
【關鍵詞】循跡;無線圖像傳輸;手機wifi遙控
中圖分類號: TP242.2文獻標識碼: A文章編號: 2095-2457(2019)36-0114-002
DOI:10.19694/j.cnki.issn2095-2457.2019.36.052
【Abstract】With the development of intelligent machine,human life and production level have been improved differently.This design is based on smart phone smart video vehicle balance car,to solve the limitations of wireless transmission of the existing intelligent tracking obstacle avoidance robot,can provide great resources for regional exploration and emergency rescue in dangerous areas,provide data for firefighters to make further emergency plans in the first time,and can also be used for the transportation of goods in high radiation workshop.
【Key words】Tracking;Wireless image transmission;Mobile wifi remote control
0 引言
隨著社會的不斷發展,科學技術水平的不斷提高,人們希望研究出能代替人來從事一些危險行業和工作的機器人[1],或要求精度極高能夠代替人來進行工業生產。機器人已歷經三代技術創新變革:第一代智能循跡避障機器人不裝載任何傳感器,只是采用簡單的開關控制;第二代智能循跡避障機器人裝有簡單的傳感器,能適應一定的外部環境變化;第三代智能循跡避障機器人是智能的,以多種外部傳感器構成感官系統。智能循跡避障機器人是移動機器人的一種,有較好的應用前景。本次設計的電動智能車可實現循跡、避障、WIFI智能視頻[2]、載物臺水平等功能,可應用于科學勘探、物品運輸等。
1 系統設計原理
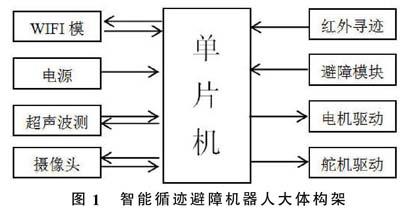
機器人尋跡系統采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉臂的舵機驅動前輪轉向,使用符合pid算法的控制器[3]來實現直流電機的調速。利用機器視覺[4]采集圖像,通過智能手機WIFI網絡進行高清傳圖來控制機器人的前進、后退、左右轉彎、高清攝像頭實時拍攝;按照規定路線行進,實時監控路況;平衡載物臺能在坡度30°的情況下依然保持水平。根據研究目的,智能循跡避障機器人大體構架如圖1所示。
圖1 智能循跡避障機器人大體構架
圖2 直流電機驅動模塊電路圖
2 系統硬件設計
2.1 直流電機驅動模塊
本直流電機驅動采用集成芯片L298和由分立元件構成的驅動電路模塊來驅動,控制端連接單片機,由單片機控制輸出PWM脈沖控制L298和分立元件驅動電路模塊的輸出和PWM脈沖輸出的方向,從而控制直流電機的轉速大小和正反轉。如圖2。
2.2 步進電機驅動模塊
步進電機是數字控制電機,它將脈沖信號轉變成角位移,即給一個脈沖信號,步進電機就轉動一個角度,因此非常適合于單片機控制。步進電機是通過輸入脈沖信號來進行控制的,即電機的總轉動角度由輸入脈沖數決定,而電機的轉速由脈沖信號頻率決定,此模塊是用來作為小車平衡載物臺水平調節。如圖3。
圖3 步進電機驅動模塊電路圖
2.3 紅外循跡模塊
循跡傳感器工作原理:TC端為高電平時,傳感器休眠,為低電平時,傳感器啟動。Signal端遇到黑線時,輸出高電平;當遇到白線,Signal輸出低電平。利用紅外線在不同顏色的表面特征,具有不同的反射性能。
2.4 超聲波避障模塊
超聲波避障,就是利用超聲波來檢測機器人的前方是否有障礙物,機器人的前方放一個超聲波發射器、一個超聲波接收器,利用單片機輸出一個40kHz的觸發信號,把觸發信號通過TRIG管腳輸入到超聲波測距模塊,再由超聲波測距模塊的發射器向某一方向發射超聲波,在發射時刻的同時單片機通過軟件開始計時,超聲波在空氣中傳播,途中碰到障礙物返回,超聲波測距模塊的接收器收到反射波后通過產生一個回應信號并通過 ECHO 腳反饋給單片機,此時單片機就立即停止計時。由于超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離,即:S=VT/2,通過單片機來算出距離。當距離障礙物達到一定距離時候,機器人自動停止前進并避開障礙物。
2.5 wifi無線收發模塊
由手機終端,通過WIFI無線網絡連接到路由器,再通過手機應用軟件,向路由器發送控制命令及數據。路由器接收到數據后通過內部的串口發送軟件,將接收到的命令和數據,通過路由器串口發送到單片機的串口端,單片機接收到這些命令后執行相應的指令,視頻信號,通過攝像頭采集之后通過路由器發至終端,并在其應用軟件中顯示攝像頭采集到的視頻信號。
2.6 圖像采集處理模塊
采用了普通高清30W像素的攝像頭拍攝視頻,攝像頭自帶有圖像處理壓縮的驅動程序,使圖像轉換為二進制數字信息,無線局域網可實現54Mbp/s的數據傳輸,不會有明顯的滯后感。
2.7 電腦終端控制并顯示視頻模塊
Mini無線路由器經過OPENWRT開源系統建立的wifi熱點,電腦終端利用VB窗口設計程序,繪制出電腦上位機軟件wifirobot.exe。利用網絡工程知識,將電腦與小車單片機系統連接在同一個局域網環境下,通過發送脈沖數字信號,控制小車的行駛。
2.8 Andriod智能手機便捷控制模塊
利用Andriod開發平臺SDK,根據JAVA語言,創建了手機控制軟件apk.文件,通過Andriod智能手機控制端,不僅可以運用觸控按鍵來控制小車的行駛轉向問題,而且可以利用現代最新重力感應技術來控制小車:當手機向前傾斜,小車前進,向后傾斜,后退,向側傾斜,小車向對應的方向轉向。
3 結束語
本文設計的基于智能手機的工業機器人控制系統,搭建硬件平臺是該系統的基礎,好的控制系統能夠保證小車準確地執行避障指令。對智能手機進行編程,使得智能手機能夠與小車控制系統協助,精確實現小車的行進、轉向和自動避障等功能,使其在無人控制情況下安全自動化行駛,在復雜地形內準確定位危險源。
【參考文獻】
[1]馬櫟.智能機器人現狀及發展趨勢研究[J].傳播力研究,2018(35).
[2]傅梓劼.智能機器人控制技術特點及其在生活中的應用[J].電子技術與軟件工程,2018(09):87.
[3]劉振輝.工業機器人在自動化控制中的應用研究[J].電子世界,2018(10).
[4]賈丙西,劉山,張凱祥,陳劍.機器人視覺伺服研究進展:視覺系統與控制策略[J].自動化學報,2015(05).
