雷達與視頻融合的落物檢測研究
2019-01-11 01:47:04黃嘉智朱思悅王磊磊
軍民兩用技術與產(chǎn)品 2018年23期
梁 影 黃嘉智 朱思悅 王磊磊
(1.上海無線電設備研究所,上海 200090;2.上海市目標識別與環(huán)境感知工程技術研究中心,上海 200090)
毫米波雷達具有體積小、質(zhì)量輕和空間分辨率高的特點,其與激光、紅外雷達相比,具有全天候且抗雨、抗雪、抗霧干擾的優(yōu)點,目前在無人駕駛、手勢識別、治安監(jiān)測等領域都有著廣泛的應用。智能視頻監(jiān)控已廣泛應用于周界安全防范等領域,如人群密度估計、治安卡口、鐵路異物入侵檢測等,由于視頻易受光照、能見度、天氣狀況的影響,漏報及誤報率較高,導致其無法單獨用于落物檢測,因此本文將雷達與視頻融合,提出了一種雷達、視頻融合的危險落物檢測方法。
1 系統(tǒng)組成
雷達與視頻融合落物檢測系統(tǒng)主要由雷達系統(tǒng)、視頻系統(tǒng)及數(shù)據(jù)融合系統(tǒng)組成,雷達系統(tǒng)主要對監(jiān)測區(qū)域的運動目標進行檢測,對目標的距離、速度、角度等信息進行測量,根據(jù)目標運動軌跡篩選出潛在下落目標,若為潛在落物,則觸發(fā)視頻獲取目標的多幀運動圖像,并將目標數(shù)據(jù)傳輸給數(shù)據(jù)融合系統(tǒng)進行進一步數(shù)據(jù)處理;視頻系統(tǒng)對獲取的連續(xù)多幀視頻圖像進行目標提取、濾波等圖像處理操作,提取出圖像中運動目標的相關信息,并將數(shù)據(jù)實時傳輸給數(shù)據(jù)融合系統(tǒng),進行進一步目標篩選及與雷達探測數(shù)據(jù)的融合處理。
2 雷達系統(tǒng)
采用2發(fā)4收的毫米波雷達,發(fā)射正交FMCW波,對探測區(qū)域的目標進行距離、速度、角度探測,并進行跟蹤濾波,根據(jù)目標運動趨勢確定是否為潛在落物。
雷達天線發(fā)射寬波束信號,覆蓋整個照射區(qū)域,4路間距為d的接收陣元并行接收回波信號,天線陣型如圖1所示。有兩個發(fā)射天線TX1、TX2,其中TX1發(fā)射信號形成的接收相位序列為[0 w 2w 3w](以第一個天線陣元作為參考陣元),因為發(fā)射天線TX2與TX1之間的距離為4d,TX2的發(fā)射信號與TX1相比額外增加了4dsinθ的路徑長度,每個接收天線上的信號都有一個額外的4w相移(與接收到的TX1的信號相比)。TX2的發(fā)射信號在4個接收天線形成的相位序列為為[4w 5w 6w 7w]。由于從TX1和TX2獲得的接收信號序列為[0 w 2w 3w 4w 5w 6w 7w],相當于8個接收陣元的接收,該陣型形成4個虛擬陣元,增加了接收陣元數(shù)量,從而提高了信號角度分辨能力。
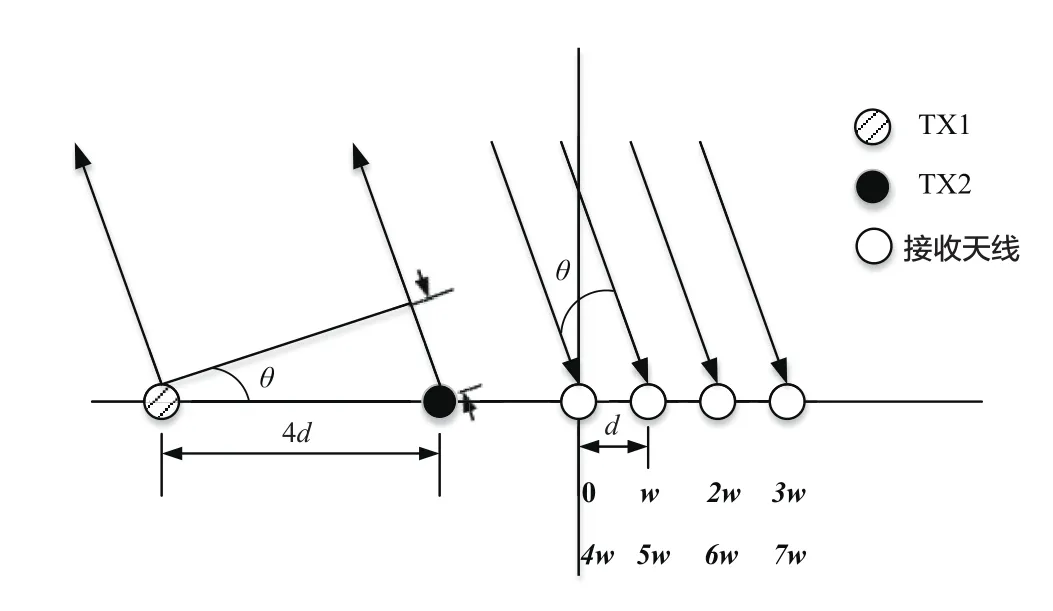
圖1 2發(fā)4收雷達天線陣型
接收信號采用數(shù)字波束合成技術,對監(jiān)控區(qū)域進行空域濾波,通過二維FFT處理對目標的距離、速度進行估計。
二維FFT方法進行距離—速度解算的實現(xiàn)步驟如圖2所示,將單個調(diào)頻周期的采樣數(shù)據(jù)[ab c…],進行FFT變換,得到頻譜[A B C…],該頻譜包含了目標的一維距離信息,積累M個周期數(shù)據(jù)后得到矩陣。
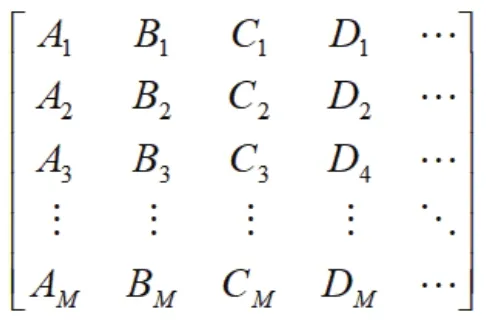
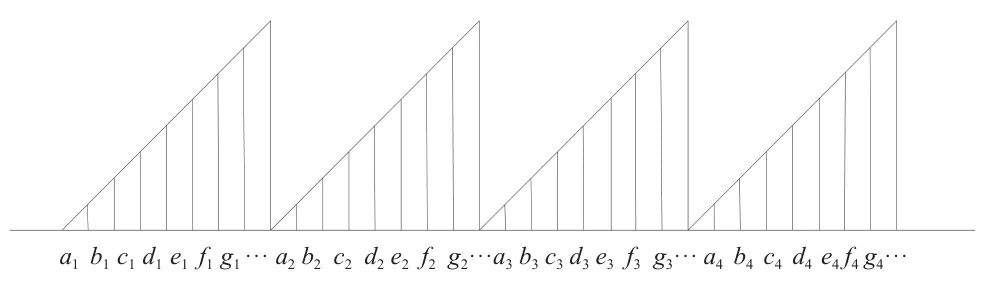
圖2 回波信號采樣圖
通過多個周期間的包絡變化可以得到目標的速度信息,即對M個周期每個距離單元數(shù)據(jù)進行FFT變換,頻譜包含了目標的速度信息。
信號處理硬件平臺采用高速AD、FPGA、ARM處理架構(gòu),F(xiàn)PGA中進行實時信息解算,如數(shù)字波束形成、二維FFT距離速度解算,并將數(shù)據(jù)傳輸給ARM,ARM對目標數(shù)據(jù)進行目標檢測及融合,該處理架構(gòu)具有較高的數(shù)據(jù)刷新速率。
3 視頻系統(tǒng)
視頻系統(tǒng)目標檢測通過目標提取、濾波、目標融合等圖像處理措施,從連續(xù)多幀圖像中獲得運動目標的位置、輪廓等信息,同時將數(shù)據(jù)傳輸給雷達視頻數(shù)據(jù)融合系統(tǒng)。
3.1 視頻目標提取
視頻目標提取將背景差分法與三幀差分法相結(jié)合,即將背景差分后二值化的圖像,再用三幀差分法進行處理,該方法能夠較為完整地提取出運動目標,并且不受運動目標速度限制。背景圖像對光照、天氣等外部動態(tài)場景變化極其敏感,若要取得較好的差分結(jié)果,必須實時對背景進行更新。
3.1.1 背景建模
中值法背景建模是取圖像序列相同位置像素值的中值作為背景。設連續(xù)fnum幀圖像序列為{I1,I2,…,Ifnum},均值法和中值法的背景建模分別如式(1)和式(2)所示。
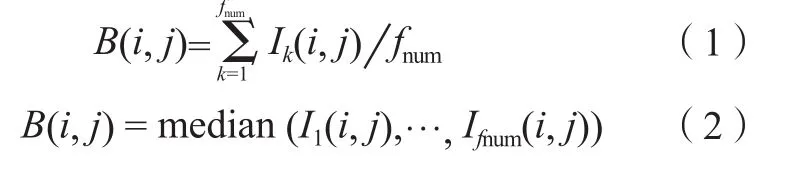
式中,i、j分別為圖像像素的行標和列標。第k幀圖像背景差分結(jié)果Dk(i,j)為:

3.1.2 二值化
背景差分后圖像需再進行二值化操作,將運動目標與背景進行分割,設二值化閾值為T,第k幀圖像二值化結(jié)果為:

閾值的選取直接影響目標提取結(jié)果,閾值取值太小,則噪聲及干擾殘留較多;取值太大,則前景提取不夠明顯,可對多次試驗獲得的樣本圖像進行處理,選取合適的二值化閾值。
3.2 形態(tài)學濾波
視頻監(jiān)控環(huán)境往往比較復雜,圖像易受噪聲等干擾的影響,導致背景差分后的二值圖中仍混有噪聲點,需對圖像進行濾波。
形態(tài)學濾波是對圖像先進行開運算,再進行閉運算。在形態(tài)學濾波中,開、閉運算能夠在濾除噪聲斑點、填補空洞的同時,很好地保存圖像局部特征。需要注意的是,形態(tài)學濾波中結(jié)構(gòu)元素的形狀及大小對濾波的結(jié)果有直接影響,可根據(jù)不同需要進行相應設定。
采用結(jié)構(gòu)元素為4×4的正方形對包含目標與噪聲的圖像進行形態(tài)學濾波,濾波前后的圖像如圖3所示,圖3(a)為濾波前圖像,圖右側(cè)最大的圓形亮點為真實目標,圖中左上角、右上角、右下角有很多噪聲點,圖3(b)為濾波后圖像,可以看出圖3(a)中的噪聲點被濾除,且目標的特征被很好地保存下來。
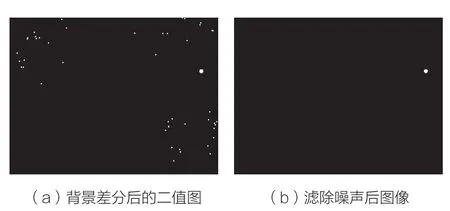
圖3 形態(tài)學濾波
采用形態(tài)學濾波方法可將圖像內(nèi)小的干擾濾除,降低噪聲及其他干擾(如昆蟲、落葉等)對目標檢測的影響。
3.3 目標融合算法
為了防止將一個目標識別為多個目標,需進行目標融合,目標融合、分類采用近鄰原則,即將距離間隔小于一定閾值的目標合并為一個目標,采用八連通進行連通分量標記,計算相鄰兩個連通分量間距離,分類后對目標重心進行提取。
目標融合操作將距離間隔小于閾值R的目標合并為一個目標,具體操作如下:
首先,進行連通分量標記(八連通),并計算相鄰兩連通分量間距離。設A1,A2為兩相鄰連通分量,如圖4所示,A1邊界的行坐標為r11,r12(r11<r12),列坐標為c11,c12(c11<c12),A2邊界的行坐標為r21,r22(r21<r22),列坐標為c21,c22(c21<c22),每個連通分量的邊界線都構(gòu)成一個矩形區(qū)域,用該矩形作為連通分量的代表。若A1為已有分類,A2為待分類,A1、A2之間的距離d12的計算分為以下4種情況:
(1)兩矩形區(qū)域相交。若r21或r22在(r11,r12)之間(包含等于),并且c21或c22在(c11,c12)之間(包含等于),則d12=0。
(2)兩矩形為上下結(jié)構(gòu)。若c21或c22在(c11,c12)之間(包含等于),但r21或r22不在(r11,r12)之間(包含等于),則d12=min(|r22-r11|,|r12-r21|)。
(3)兩矩形為左右結(jié)構(gòu)。若c21或c22不在(c11,c12)之間(包含等于),但r21或r22在(r11,r12)之間(包含等于),則d12=min(|c22-c11|,|c12-c21|)。
(4)兩矩形為對角結(jié)構(gòu)。若c21或c22不在(c11,c12)之間(包含等于),且r21或r22不在(r11,r12)之間(包含等于),設連通分量A1的矩形區(qū)域4個頂點分別為a11、a12、a13、a14,A2的矩形區(qū)域頂點分別為a21、a22、a23、a24, 則d12=min(d(a11,a24),d(a14,a21),d(a12,a23),d(a13,a22))。
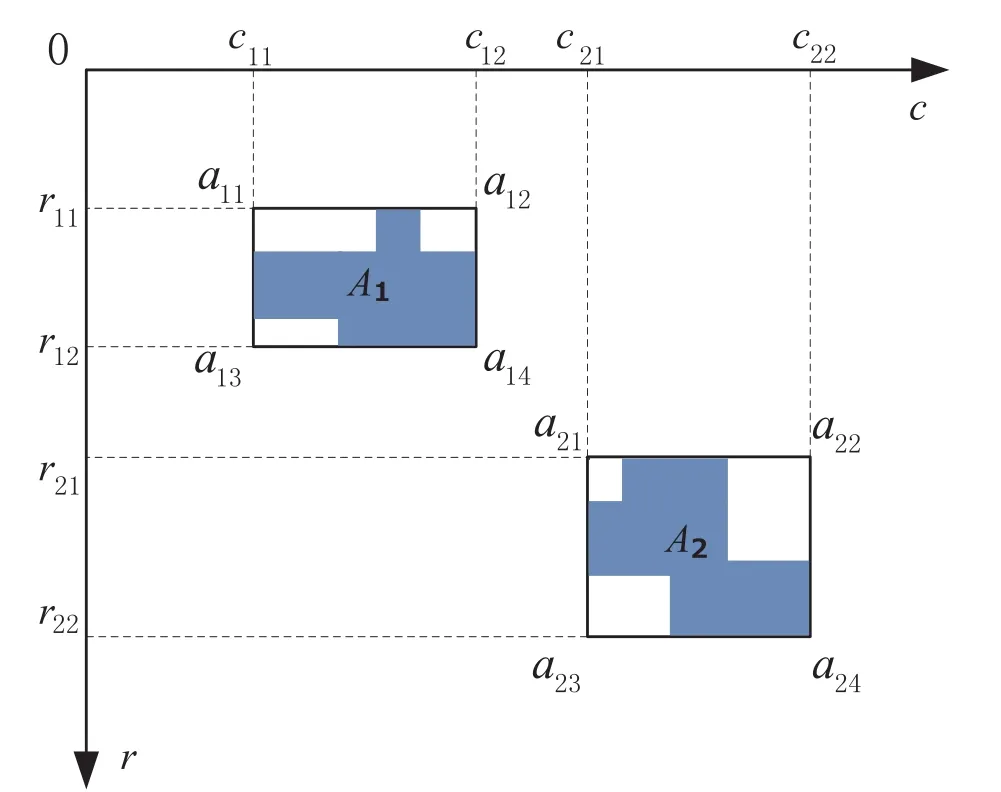
圖4 相鄰聯(lián)通區(qū)域
其次,進行分類合并,將連通分量間距離小于閾值T1的分量合并,T1取最小可檢測目標的大小。若不滿足合并條件,則建立新類別;若滿足合并關系,則將滿足合并關系的類別與待分類的分量合并到標號最小的類中(可能與多個類別滿足合并關系)。
對濾波后的二值圖進行目標融合和不進行目標融合的目標分類結(jié)果如圖5所示,藍色框內(nèi)圖像為目標區(qū)域的局部放大,目標分類用紅色矩形框標出。圖5 (a)為沒有進行目標融合的分類結(jié)果,可以看出一個目標被分割成4個,圖5(b)為目標融合算法作用后的目標分類,目標碎片得到了融合,確認為一個目標,目標融合算法降低了同一目標的分離概率。
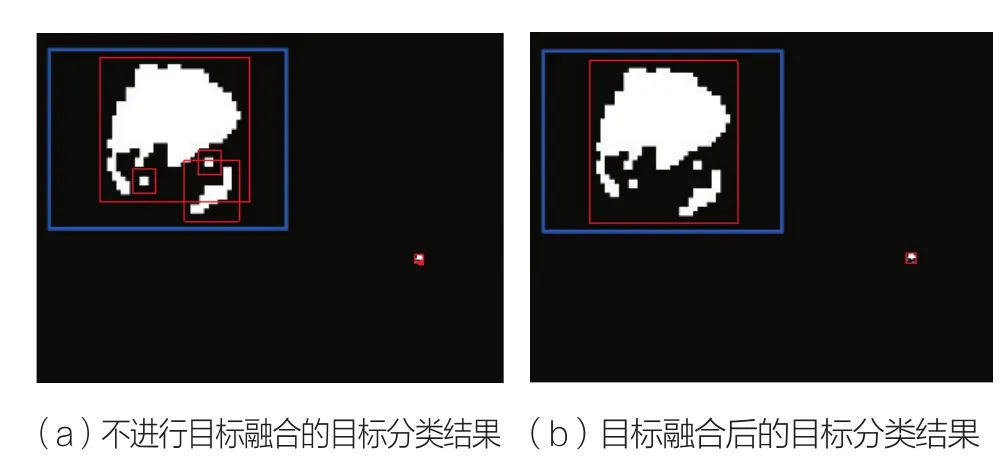
圖5 目標融合
4 數(shù)據(jù)融合系統(tǒng)
數(shù)據(jù)融合系統(tǒng)對雷達探測的目標數(shù)據(jù)進行處理,通過運動目標軌跡擬合及運動速度等信息進一步判斷是否為落物;根據(jù)視頻系統(tǒng)提供的各幀圖像中目標的位置,采用Hough變換法進行多目標運動軌跡提取,根據(jù)運動參數(shù)提取下落目標;將雷達落物數(shù)據(jù)與視頻處理結(jié)果進行融合,進一步剔除干擾。雷達視頻數(shù)據(jù)融合系統(tǒng)簡要處理流程如圖6所示。
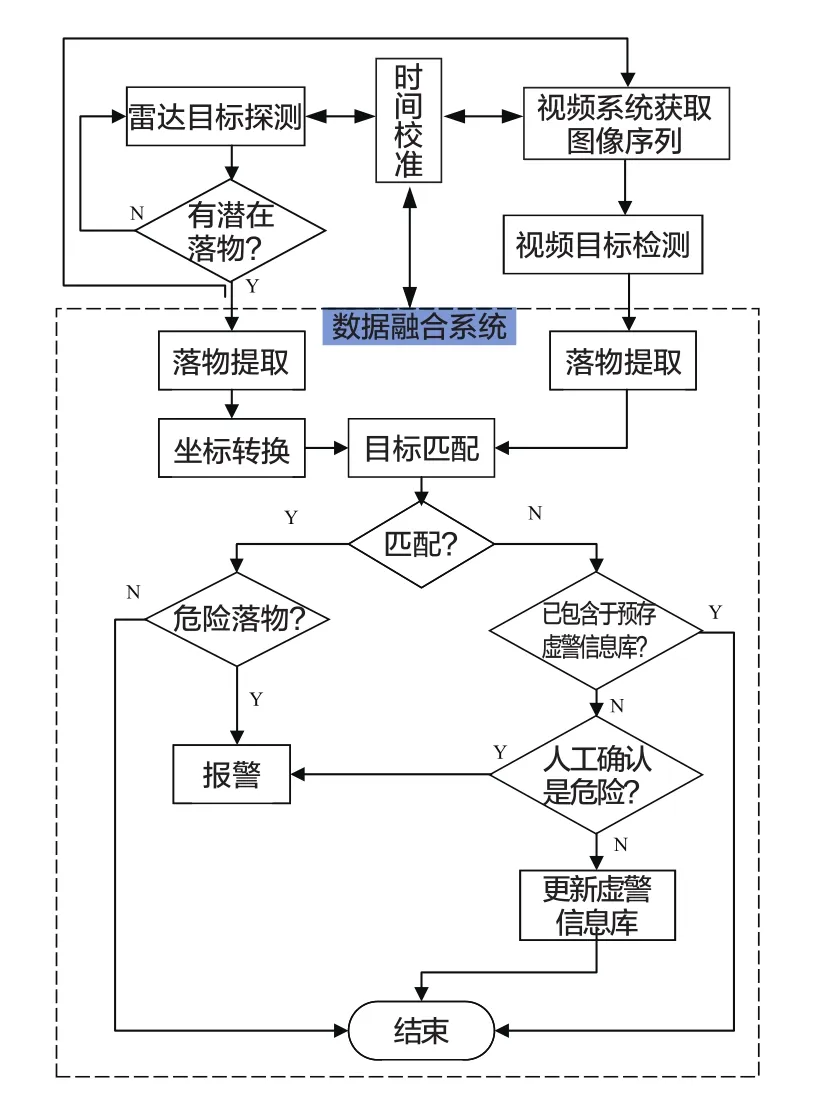
圖6 數(shù)據(jù)融合系統(tǒng)簡要處理流程
首先將雷達探測目標位置轉(zhuǎn)化為視覺系統(tǒng)坐標,雷達探測目標與視頻系統(tǒng)檢測的運動目標進行匹配,對能夠匹配的目標進行危險目標判斷,判定為危險目標則報警;無法匹配的目標與預存的虛警信息庫進行匹配,若不屬于預存的虛警情況,則需人工查看視頻圖像數(shù)據(jù)來判斷是否為危險目標,若為危險落物則報警,否則更新虛警信息庫。
雷達與視頻中匹配成功的目標,仍可能存在干擾目標,會影響危險目標的判定。為了去除漂浮物、飛鳥、突發(fā)干擾及危險區(qū)域外落物產(chǎn)生的虛警次數(shù),列出以下3種簡單的危險目標判定方法:(1)通過圖像中目標輪廓來區(qū)分危險目標與干擾目標; (2)計算目標下落高度,若下落高度小于一定閾值(傾斜飛過監(jiān)控區(qū)域的鳥等),則不報警;(3)根據(jù)目標軌跡對目標落地位置進行預測,若目標下落位置不在危險區(qū)域,則認為目標超界,否則輸出報警信號。
5 結(jié)束語
雷達具有全天候的工作能力,且抗雨、抗雪、抗霧干擾能力強,但無法識別目標種類;視頻易受環(huán)境干擾,但可以實現(xiàn)探測場景的可視,所以可將兩者結(jié)合起來進行檢測。雷達與視頻融合的目標檢測方法將是未來重要的發(fā)展方向,本文對落物檢測的探索開啟了一個新的應用領域。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
