江陰大橋實測數據時間同步分析
2019-01-12 04:07:40,,,,,
浙江工業大學學報 2019年1期
,, ,, ,
(1.浙江工業大學 建筑工程學院,浙江 杭州 310023 ;2.溫州大學 建筑工程學院,浙江 溫州 325035)
江陰大橋是我國首座跨徑超千米的特大型鋼箱梁懸索橋,主跨長1 385 m,全長3 071 m,是我國大型橋梁發展史上的一座里程碑。江陰大橋也是早在20世紀末就已安裝了結構健康監測系統的橋梁之一[1-2],其結構健康監測系統于1999年投入運營。作為第一代結構健康監測系統,其傳感器的數量和規模有限,而且長期運營也面臨諸多問題。為此,原有結構健康監測系統于2004年開始升級改造。在系統升級改造期間,江陰大橋靠近靖江一側的主梁不幸遭受一艘打樁船的撞擊。當時,傳感器系統已經完成升級并投入使用,它們成功記錄了船撞過程的橋梁加速度等響應數據。然而,由于數據傳輸網絡尚未完成升級,各個數據采集儀的內部時鐘尚未達成同步,從而導致所采集的結構健康監測數據出現時間不同步現象。換言之,由于當時橋梁監測系統存在缺陷,導致采集的數據存在時間不同步的現象。船撞期間的橋梁響應監測數據對于橋梁撞后狀態評估的重要性不言而喻,然而,如果不同部位的監測數據在時間上存在不同步,可能導致分析結果出現錯誤。監測數據時間不同步的其中一個直接后果即是它們之間的相位信息將出現重大誤差,而相位則是反映結構性能和損傷的重要指標,是結構損傷識別的重要依據之一[3-7]。因此,對江陰大橋船撞期間結構健康監測數據進行時間同步分析是必要且有意義的。
時間同步是無線傳感器網絡領域的研究熱點之一[8-17]。在無線傳感器網絡中,每個傳感器節點都有各自獨立的處理器和時鐘,因此,每個節點的時鐘未必與其他節點的時鐘同步。此外,各個傳感器的采集啟動時間的不同、各個節點采樣頻率的不同以及采樣頻率隨時間而變化等因素都可能導致無線傳感器網絡無法實現精確同步。目前,業界普遍采用時間同步協議來解決無線傳感器網絡的時間不同步問題,如:RBS協議[18]、TPSN協議[19]、FTSP協議[20]、PulseSync協議[21]、μ-Sync協議[22]、TSRTS協議[23]以及2LTSP協議[24]等。值得一提的是,無線傳感器間的時間同步協議精度非常高,比如在Imote2平臺上應用FTSP時間同步協議,精度可達10~80 μs量級[12]。雖然時間同步協議能幫助無線傳感器網絡實現較高精度的時間同步,但是它們并不適用于糾正實測數據的時間不同步問題。在這方面,現有研究仍十分有限。Lei[25]等提出了ARX (Auto-regressive with exogenous input)和ARMAV (Auto-regressive moving average vector)這兩種時間同步算法。前者用于輸出信號和輸入信號之間的時間同步,而后者用于兩個輸出信號之間的時間同步。為評估無線傳感器網絡的時間同步精度,Lynch[26]等采用無線信號與參考有線信號之間的最小誤差范數,確定兩者之間的時間延遲。類似地,Shen等[27]運用無線和有線傳感器數據間的互相關函數來估算它們之間的時間延遲。然而,上述研究僅利用模擬數據進行方法驗證,它們在環境激勵下實際結構的實測異步數據時的性能仍不得而知。因此,筆者采用相關系數算法進行江陰大橋實測加速度數據時間同步分析。鑒于相關系數算法只適用于兩個信號的局限性,采用任意選取其中一個信號作為參考信號,固定其時間軸,其余信號為時間平移信號。然后平移信號以一定的時間步長相對參考信號進行移動,當參考信號與平移信號之間相關系數的絕對值達到最大時,則認為此時的平移時間即為信號間的實際時間延遲。借助江陰大橋船撞期間實測數據展開研究,并利用船撞事件對其進行了驗證。值得強調的是,筆者還使用頻域分解法(FDD)對船撞期間時間同步后的實測數據進行江陰大橋的模態識別,用以驗證相關系數算法的準確性。
1 江陰大橋結構健康監測系統
江陰大橋結構健康監測系統經過升級改造后,主要有4 個部分組成,即傳感器系統、數據采集與傳輸系統、數據儲存與管理系統以及預警與安全評估系統。其中對于傳感器系統的升級,按監測內容與監測傳感器不同可分為:振動監測系統、環境監測系統和主梁位移監測系統。由于筆者僅對實測加速度進行分析,在此重點介紹橋梁振動監測系統,如圖1所示。圖1(a)為江陰大橋主跨鋼箱梁的加速度傳感器和數據采集儀布置圖。由圖1可見:大橋主跨鋼箱梁上共安裝15 個加速度傳感器,均勻分布在主跨的1/8,1/4,3/8,1/2,3/4斷面處。在每個斷面上,一個加速度傳感器安裝在斷面中央以測量橋梁水平橫向加速度,另外兩個加速度傳感器則分別被安裝在斷面兩側以測量橋梁豎向加速度。大橋上總共安裝了8 個數據采集儀用以收集附近傳感器的模擬信號,并將模擬信號轉換成數字信號。其中6 個數據采集儀安裝鋼箱梁內,其余2 個分別位于前、后錨室內。主跨1/8,1/4,3/8斷面處的加速度傳感器分別與3 號數據采集儀(DAU3)、4 號數據采集儀(DAU4)和5 號數據采集儀(DAU5)相連接。值得強調的是,主跨1/2,3/4斷面處的加速度傳感器都與7 號數據采集儀(DAU7)相連接。實測加速度的采樣頻率為50 Hz,每一小時保存一份數據。
江陰大橋遭行船撞擊發生在2005年6月2日20點14分左右。肇事船為一只打樁船,船撞位置接近AD5EV號梁端截面(圖1a)。圖2為船撞期間加速度實測數據時域圖,可以看出:加速度AD9CL,AD13CL在船撞期間有且僅有一個明顯波形,同樣地,其余實測加速度也存在一個類似的波形,因此,可以推斷它們是由船撞引起的,并且此波形引起的撞擊響應約為2 min。回看圖2,通過對不同位置傳感器的響應變化分析可知:不同位置處的加速度信號的波形極為相似,由此粗略推斷橋梁并沒發生明顯損傷,說明此次船撞事件對結構產生的沖擊波較小。另外,朱紹瑋[2]等對受撞擊后的江陰大橋的基于自聯想神經網絡的損傷檢測分析同樣表明:本次船撞事故對結構造成的總體損傷程度較小,無明顯局部構件破損。因此,此次船撞事件并未對江陰大橋造成損傷。借助船撞事件引起的波形,顯而易見:AD9CL,AD13CL之間是時間不同的,并且它們之間時間延遲量相當大,這也說明對江陰大橋進行時間同步的必要性。回看圖2,在加速度AD13CL出現船撞波形的同一時刻,加速度AD11CL也出現與加速度AD13CL一樣的船撞波形,再則上述中提及,加速度AD11CL,AD13CL相連于同一個數據采集儀,說明AD11CL,AD13CL是時間同步數據。值得一提的是,當對AD11CL,AD13CL船撞峰值進行對齊時,發現它們之間存在1.76 s的偏差,這可能是由于船撞沖擊力沿橋梁傳播本身存在一定的延遲,同時也說明通過簡單的對齊加速度峰值來尋找異步數據的時間偏差是不夠準確的。鑒于以上情況,筆者提出采用相關系數的時域校準方法識別江陰大橋船撞期間實測數據的時間延遲。
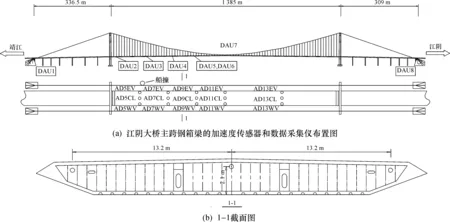
圖1 江陰大橋主跨鋼箱梁的加速度傳感器和數據采集儀布置圖Fig.1 Deployment of accelerometers and DAUs on deck of Jiangyin bridge
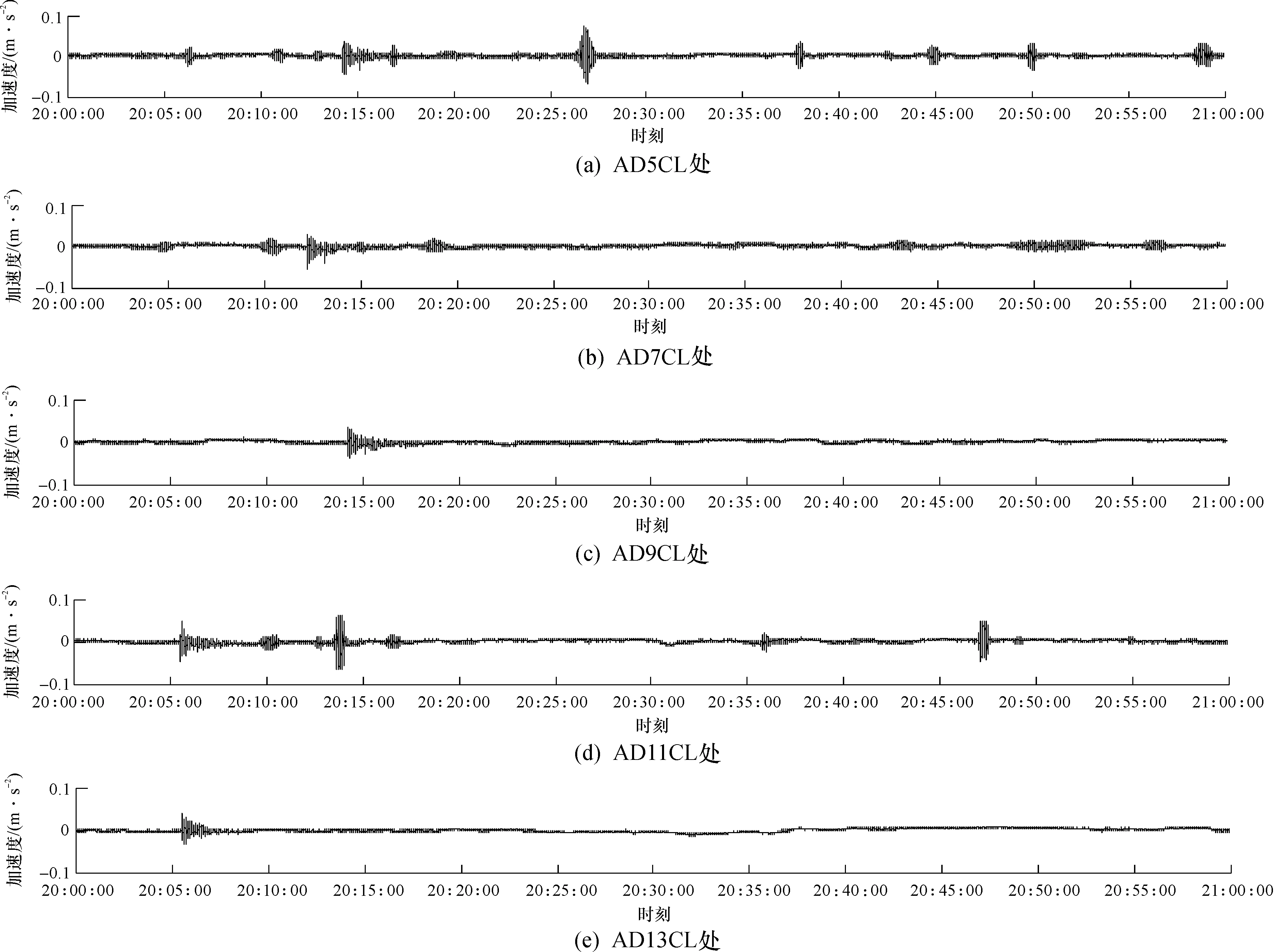
圖2 船橋碰撞期間實測的橋面橫向加速度Fig.2 Lateral accelerations of bridge deck measured during ship-bridge collision
2 相關系數算法
眾多研究表明:同一系統測得的加速度信號往往存在某種內在規律,但無法用確切的數學表達來表示。而相關系數是描述信號間相關程度的指標[28],即可以通過計算信號間的相關系數來尋求它們的實際依存關系。在一個試驗中,產生兩組成對的隨機過程x(i),y(i),計算x-μx,y-μy的平均乘積。取樣本容量N→∞時的極限,這個平均乘積就成為x(i),y(i)之間的協方差,其定義為

(1)
隨機過程x(i),y(i)的相關系數為
(2)

根據相關系數的特性可知:理論上當γxy越接近1時,隨機過程x(i),y(i)的線性相關程度越好,波形吻合程度越高。特別地,相關系數接近于1的程度與樣本容量N的大小有關。當樣本容量N較小時,僅憑相關系數較大就判定隨機過程x(i),y(i)之間有密切的線性關系是不妥當的。所以合理選擇樣本容量對分析數據的結果也至關重要。
因此,采用相關系數算法來識別加速度數據的時間延遲。桂新[29]等利用相關系數算法研究水下地形測量信號之間的時間延遲,最終獲得了較為理想的效果。殷興華[30]利用相關系數算法解決了視頻拼接中源視頻在時間上不同步的問題。另外,考慮到相關系數算法只適用兩個信號通道求解的局限性。鑒于此,首先任意選擇一個加速度信號作為參考信號,而其余的加速度信號作為時間平移信號,用于解決多通道存在時間延遲的問題。將參考信號的時間軸固定,平移信號的時間軸以一定的時間間隔進行移動。對于每一次平移,通過相關系數算法求解參考信號與平移時間信號的相關系數。最后當參考信號與時間平移信號的相關系數達到最大值時,最大相關系數所對應的平移時間,即為參考信號與時間平移信號的時間延遲。參考信號與時間平移信號之間的相關系數的表達式為
(3)
式中:τ=kΔt為參考信號與時間平移信號的時間延遲,Δt為采樣間隔,k為參考信號與時間平移信號的平移數據量;N為采樣數據的總個數;y(i),x(i)分別為參考信號與時間平移信號;ux,uy分別為x(i),y(i)的平均值。
3 計算結果與討論
3.1 實測數據時間同步分析
以加速度AD9CL,AD7CL的時間同步分析為例,詳細闡述相關系數方法識別異步數據間時間延遲的過程。再次重申,加速度AD9CL,AD7CL都有一個由船撞事件引起的波形,通過對齊船撞峰值,大致確定了兩者之間的時間延遲,并考慮到相關系數算法的容錯能力(將其他可能事件也考慮其中),確定時間平移信號的搜索范圍為-250~0 s。圖3為相關系數隨平移信號AD7CL進行時間平移的變化圖。如圖3所示,平移信號以時間步長0.02 s進行精確搜索,從0 s開始,相關系數總體上隨平移時間的增大而增大,在第-121.78 s處相關系數取得最大值,隨后相關系數逐漸減小。值得注意的是,在搜索范圍-240~-180 s,包含了船撞事件發生前的顯著事件,可以發現相關系數絕對值的總體趨勢隨平移時間(絕對值)的增大而減小,證明相關系數算法具有較高的容錯能力。由圖3可知:加速度AD9CL,AD7CL之間時間延遲為-121.78 s。同理可得其余加速度AD5CL,AD11CL,AD13CL,AD9CL的識別結果,如表1所示。表1為船撞期間各個加速度與加速度AD9CL之間的時間延遲。可以從表1中發現:加速度AD11CL,AD13CL與加速度AD9CL之間的時間延遲都為-522.70 s,這正好與事實相符,因為AD11CL,AD13CL的加速度傳感器都相連于同一個數據采集儀。利用已識別的結果,將加速度AD5CL,AD7CL,AD11CL,AD13CL與加速度AD9CL進行時間同步。圖4為時間同步后的船撞期間橋面橫向加速度圖。如圖4所示,各個加速度的船撞事件引起的波形均發生在同一時刻。通過對比圖2,說明已將船撞期間的異步數據實現時間同步,驗證了相關系數算法的準確性。
表1船撞期間實測加速度時間延遲
Table1Timelagsbetweenaccelerationsmeasuredduringship-bridgecollision
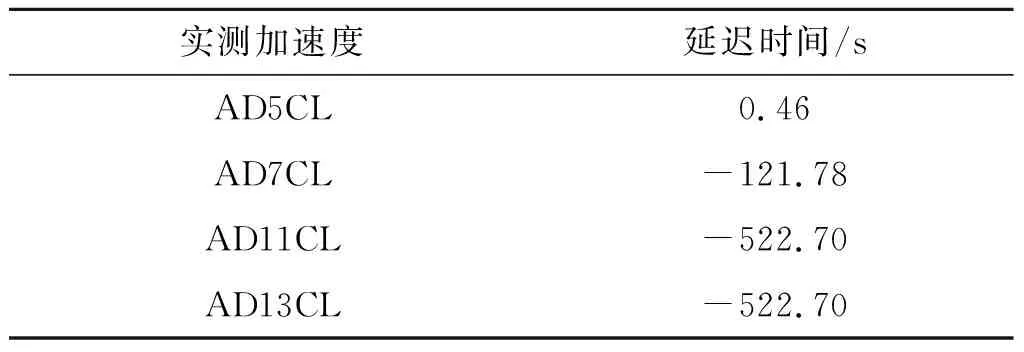
實測加速度延遲時間/sAD5CL0.46AD7CL-121.78AD11CL-522.70AD13CL-522.70
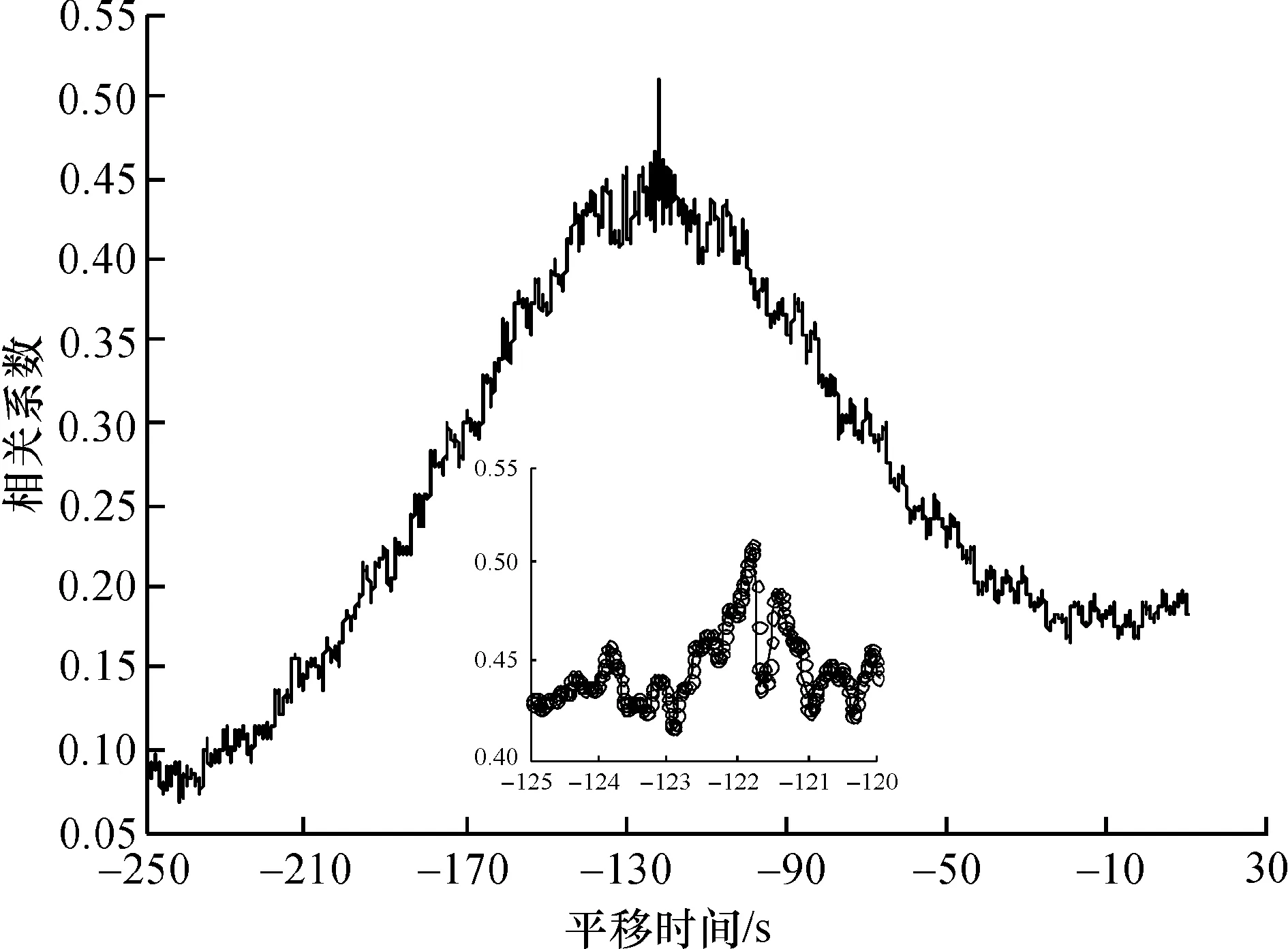
圖3 船撞期間的加速度的相關系數隨平移時間的變化圖(AD9CL ,AD7CL)Fig.3 Correlation coefficient versus shifting times for acceleration measured during ship-bridge collision(AD9CL, AD7CL)
相關系數方法是通過尋求數據間的大規律來識別異步數據的時間延遲,相關系數算法是一種時域校準方法,此方法往往需要大量數據進行驅動,才能保證計算的正確性。筆者使用相關系數方法識別異步數據的時間延遲時,采用了一個小時的監測數據,共包含180 000 個數據。如表2所示,以20:00:00為起始時間,列出了時間同步后船撞事件的峰值加速度的出現時間。可見各個加速度出現船撞事件峰值的時間不盡相同。以加速度AD9CL為基準,峰值出現時間最大相差6.22 s(加速度AD5CL),而最小相差4.32 s(加速度AD13CL)。不難發現:相關系數算法考慮了整個時域信號之間的相關程度,而船撞事件對相關系數算法在整個時域中時間延遲的識別影響不大。
表2時間同步后船撞事件的峰值加速度的出現時間
Table2Timeofoccurrenceofpeakaccelerationsintimesynchronizedaccelerations
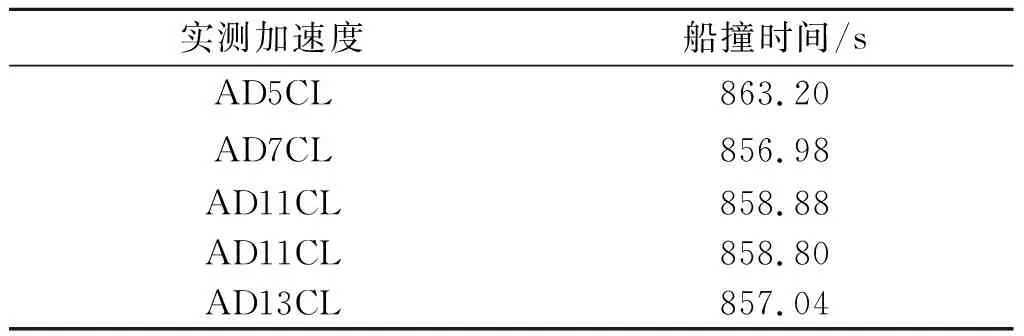
實測加速度船撞時間/sAD5CL863.20AD7CL856.98AD11CL858.88AD11CL858.80AD13CL857.04
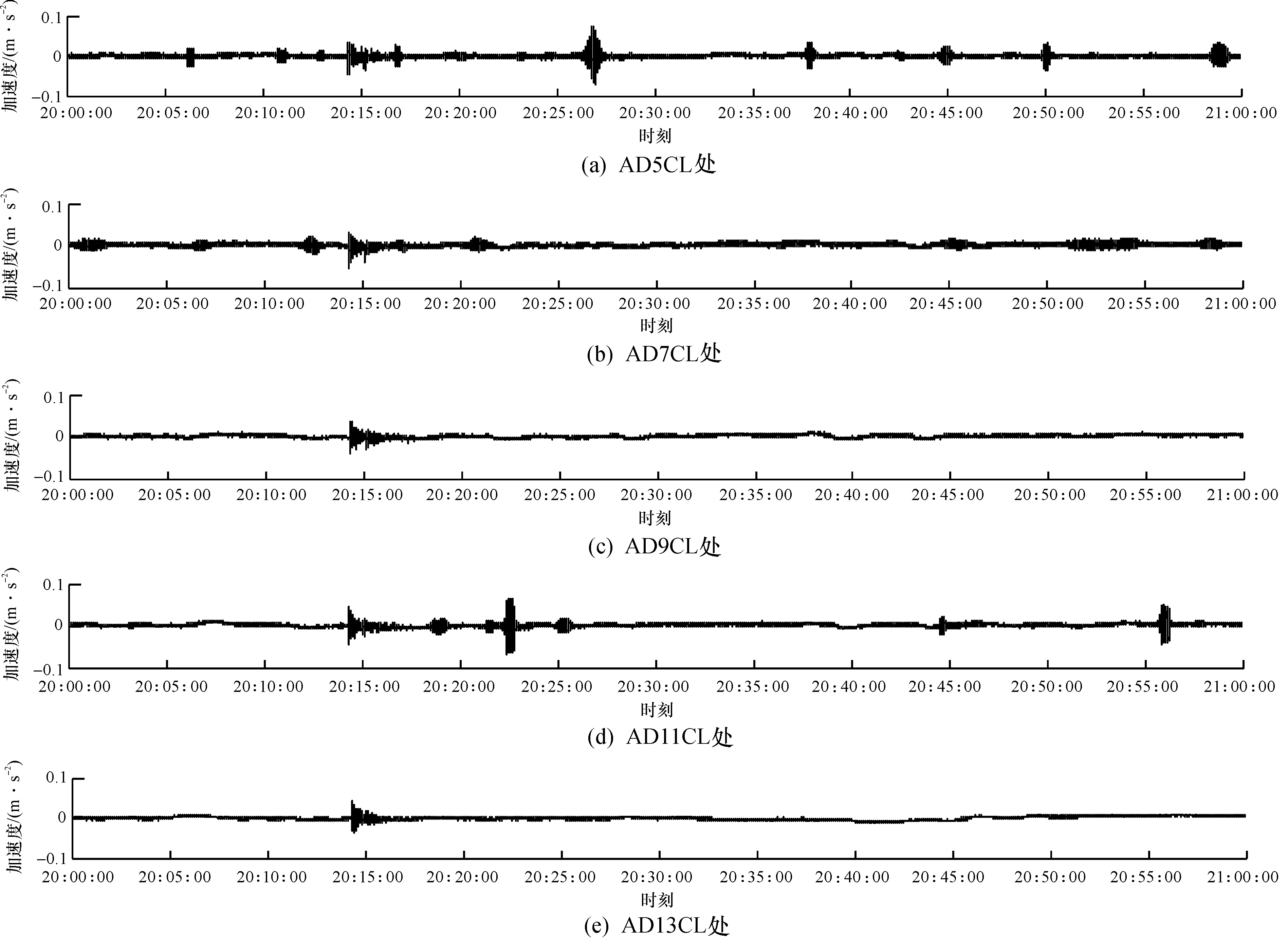
圖4 時間同步后的船橋碰撞期間橋面加速度Fig.4 Time synchronized accelerations of bridge deck measured during ship-bridge collision
3.2 模態分析
為了驗證時間同步后的實測數據是否具有足夠的精度用于模態分析,采用頻域分解法(FDD)進行江陰大橋的模態識別。結果表明:從時間同步后的實測數據中成功識別出江陰大橋前兩階橫向模態。江陰大橋前三階橫向模態頻率與模態振型描述見表3。圖5為江陰大橋前三階橫向模態的振型圖。由于江陰大橋上的加速度傳感器只布置于主跨的1/8,1/4,3/8,1/2,3/4斷面處,所以各階模態振型的5/8,7/8主跨位置分別利用了3/8,1/8主跨的正對稱或反對稱。
表3前三階橫向模態頻率與模態振型描述
Table3Identifiedmodalfrequenciesandmodeshapesofthefirstthreelateralmodes
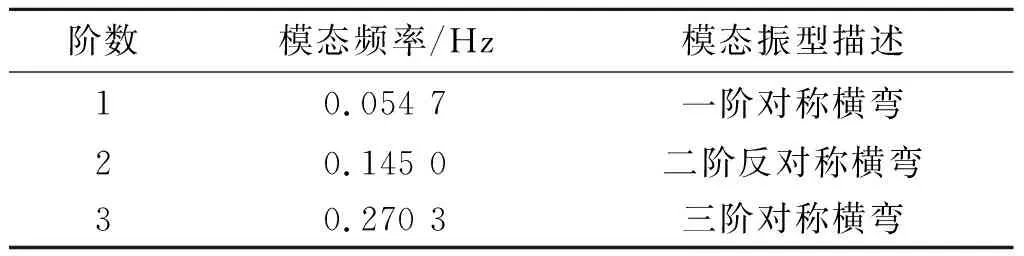
階數模態頻率/Hz模態振型描述10.054 7一階對稱橫彎20.145 0二階反對稱橫彎30.270 3三階對稱橫彎
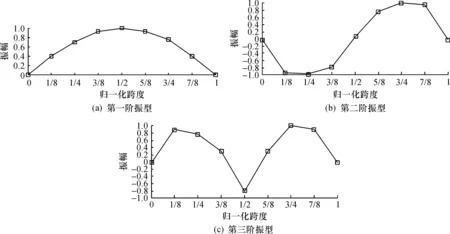
圖5 江陰大橋前三階橫向模態振型Fig.5 Identified mode shapes of the first three lateral modes
由圖5可知:第三階振型的AD9CL節點位置存在偏差,而前兩階振型是較理想的。因為對于動力監測來說,時間同步的精度要求非常高,即使非常小的同步誤差對系統參數的識別也較為顯著。比如Krishnamurthy[3]等研究了時間延遲對模態參數識別的影響,當時間延遲量級在30 μs至100 ms之間變化時,其高階振型識別結果誤差很大;Feng等[4-5]研究了時間延遲和采樣頻率誤差對模態參數識別和剛度參數識別的影響,當時間延遲量在20 ms時,兩者存在一定的相位差,對高階振型的識別結果影響顯著。另外,實測數據與理想實驗中獲取的測試數據不同,現場測量數據通常包含更多的不確定性,這可能會降低相關系數算法識別時間延遲的性能。監測系統為有線監測系統,加速度傳感器的采樣頻率為50 Hz,導致現場測量數據的時間分辨率也對時間同步精度施加約束。雖然相關系數算法識別時間延遲的分辨率已達到0.02 s,但并不能保證已達到真正意義上的延遲時間。換而言之,江陰大橋的前幾階模態為低頻密頻模態,高階模態對環境噪聲和時間同步的誤差更加敏感[3,6,12]。因此,再次驗證了相關系數算法用于識別時間延遲的準確性。
4 結 論
采用相關系數算法進行江陰大橋結構健康監測數據的時間同步分析。考慮到相關系數算法只適用于兩個信號的局限性,通過選取參考信號與時間平移信號來解決多個信號間的時間延遲問題。當參考信號與時間平移信號的相關系數絕對值達到最大值時,所對應的平移時間即為實測加速度之間的時間延遲。該方法成功地識別出了船撞期間實測加速度間的時間延遲,并借助船撞事件驗證了相關系數算法的準確性。此外,又利用頻域分解法從船撞期間時間同步后的實測數據中成功地識別出江陰大橋前兩階橫向模態,再次驗證了相關系數算法用于識別時間延遲的準確性。因此,相關系數算法能夠準確地識別出異步數據的時間延遲,為后續的研究分析奠定了基礎。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
