PSO優化三維Otsu森林冠層圖像快速分割算法
2019-01-14 02:31:21朱良寬邵思協景維鵬劉亮
哈爾濱理工大學學報 2019年5期
朱良寬 邵思協 景維鵬 劉亮
摘 要:森林冠層圖像分割是采用數字圖像處理方法獲取森林冠層參數的關鍵步驟,針對林木冠層魚眼圖像背景復雜、分辨率高的特點,提出一種PSO優化三維Otsu法的森林冠層圖像分割算法,將傳統三維OTSU進行分解,以減少運算時間和存儲空間,并利用PSO算法優化二維Otsu求取閾值過程。實驗結果表明:提出的算法能夠快速并準確地分割森林冠層魚眼圖像,尤其在樹梢細節區域分割效果更好。所提方法可為林木冠層參數測量提供技術支持。
關鍵詞:森林冠層圖像;圖像處理;自動閾值分割;三維Otsu法;粒子群優化
DOI:10.15938/j.jhust.2019.05.021
中圖分類號: TP391.4
文獻標志碼: A
文章編號: 1007-2683(2019)05-0128-06
Forest canopy image segmentation is a key step to forest canopy parameters using digital image processing methods. According to the characteristics of forest canopy fisheye images with complex background and high resolution, this paper proposed a PSO-optimized forest canopy image decomposition Otsu method 3D segmentation algorithm. In this method, the 3D OTSU was decomposed, which reduced the computing time and storage space, and the PSO algorithm was adopted to optimize the two-dimensional Otsu to obtain the threshold process. Experimental results showed that the algorithm proposed in this paper can quickly and accurately segment the fisheye images of forest canopy, especially in the details of treetops. The proposed method can provide a technical support for forest canopy parameters measurement.
0 引 言
隨著現代林業發展,林木冠層參數成為森林生態系統相關研究的主要內容,具有重要意義。作為群落外觀的可視化判斷指數,林木冠層參數已被廣泛應用于森林生態系統的相關研究中[1-2],并占據著非常重要的地位[3]。冠層結構的各項參數,能夠直接反映植被的生長能力,對于森林氧氣釋放速率[4]、固碳效率和水土保持能力的測量與計算提供了極大的幫助,為森林生態系統的各項指標估計測量提供十分重要的相關參考依據。
林木冠層參數主要包括葉面積指數、森林郁閉度、叢生指數、葉傾角等。葉面積指數(leaf area index,LAI) 是用來表征林木冠層相應結構的變量。森林中樹木葉片的蒸發、蒸騰和光合作用等很多的環境生態功能都與其自身葉面積的大小密切相關。葉面積指數深刻影響著生態系統中的冠層內和冠層下的微環境,發揮著控制水和碳的交換、輻射衰減、冠層水截留的作用,對于生物地理化學循環具有十分重要的意義[5]。
近年來,植物冠層圖像分割方法的研究和應用日益得到關注,傅隆生等[6]提出了一種適用于獼猴桃采摘機器人夜間識別的方法,在圖像分割環節中使用Otsu閾值法將采集到的獼猴桃果實圖片中果實果萼部分分割出來;Carlos Poblete-Echeverria等[7]通過對比試驗,比較K-均值,人工神經網絡(ANN),隨機森林(Rforest)和光普指數(SI)四種分類方法在人工葡萄園冠層圖像分割中的性能;W.S.Qureshi等[8]在所獲取的芒果樹冠層圖像中分割出芒果過程中對比使用鄰近算法(KNN)和支持向量機算法(SVM)的分割效果。
在眾多的分割算法中,閾值分割法為使用普遍且簡單有效的分割方法之一。在閾值分割法中的最大類間方差法使用廣泛,自1978年由Otsu(大津展之)提出的一維最大類間方差法[9]后,由于該方法分割效果好、適用范圍廣并且簡單有效,近些年得到了廣泛的應用,但一維的大津算法對于目標背景灰度區別不明顯時存在較大的分割錯誤。因此一些學者提出了二維Otsu法[10] 和三維Otsu法[11],有效地提高了抗干擾能力,改善了算法的魯棒性。也有一些學者在此基礎上進行優化改進,或將優化后的算法應用于不同領域。Guo Weiya等[12]結合濾波器和優化粒子群算法對二維大津閾值算法進行改進,實驗結果表明改進后的算法比傳統的遞推算法有更好的分割精度和更短的分割時間。范朝冬等[13]將改進的斜分Otsu法應用于回轉窯火焰圖像分割,提高了圖像分割的抗造性和速度。Qiao Naosheng,Sun Ping[14]利用大津閾值分割算法對PCB光電圖像進行分割,提出了一種改進的大津閾值算法并對其基本原理和分割優點進行詳細分析,并進行定量評價分析分割,結果表明改進的大津閾值算法處理效果更好。Wei等[15]結合濾波器和優化粒子群算法(PSO)對二維大津閾值算法進行改進,實驗結果表明改進后的算法比傳統的遞推算法有更好的分割精度和更短的分割時間。
由于林木背景復雜,冠層結構復雜導致透光效果不均勻,會產生光照不均現象,因此更需要精確的分割精度以獲取冠層參數。基于此,本文首先采用三維Otsu法進行冠層圖像分割;另外考慮到三維Otsu法推廣能力偏弱,計算復雜度較高,魯棒性和實時性也存在一定提升空間,因此本文結合PSO算法的優勢,提出一種基于PSO優化的三維Otsu法的分割算法,優化了閾值求取過程。最后通過森林冠層圖像分割實驗對所提算法的可行性與有效性進行了分析。
1 傳統三維Otsu法
1.1 算法的基本介紹
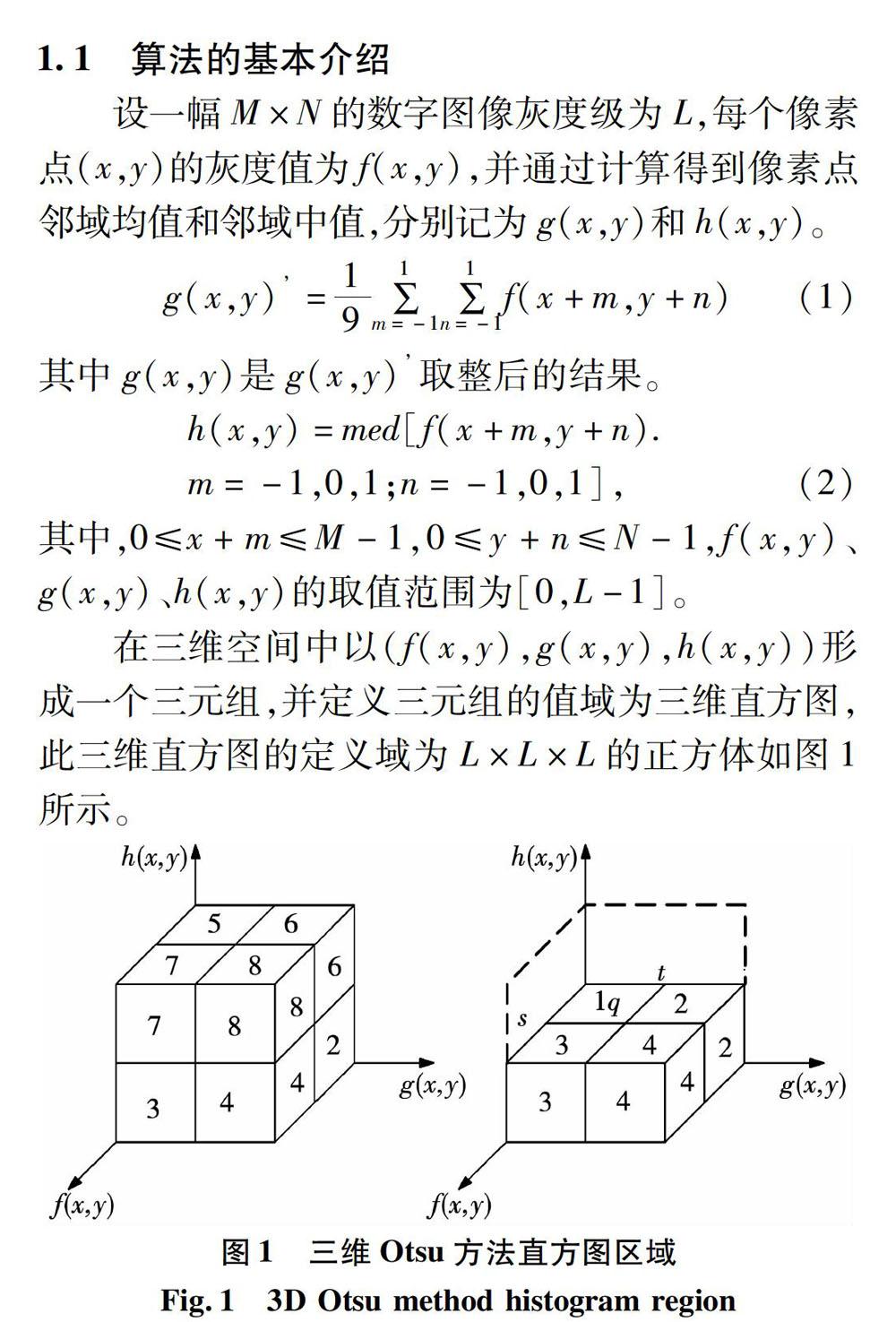
設一幅M×N的數字圖像灰度級為L,每個像素點(x,y)的灰度值為f(x,y),并通過計算得到像素點鄰域均值和鄰域中值,分別記為g(x,y)和h(x,y)。
1.2 傳統三維Otsu法的不足
對比一維、二維Otsu方法,傳統三維Otsu方法在圖像分割時加強了對噪聲的去除,但也同時在林木冠層圖像處理中仍存在著一些不足之處:由于維度為三,使得計算較復雜度,相應分割所需要的時間較,影響實時性;其所需存儲空間較大,在實際項目中難以得到應用。
2 基于PSO優化的三維Otsu法的森林冠層圖像分割算法
粒子群算法[16](particle swarm optimization, PSO)的原理是通過群體中個體之間的協作和信息共享來尋求最優解,具有算法設置參數少、實現過程簡單、精度高、收斂速度快的等優點,應用廣泛[17-20]。算法假設優化問題為D維搜索空間中隨機生成的i個粒子,每個粒子攜帶一個二維信息,分別是粒子的位置和速度,速度決定粒子的飛行距離和方向,粒子根據所規定的適應度進行迭代匹配最優值,在迭代中根據曾到達的最好位置和種群的最好位置進行修正。
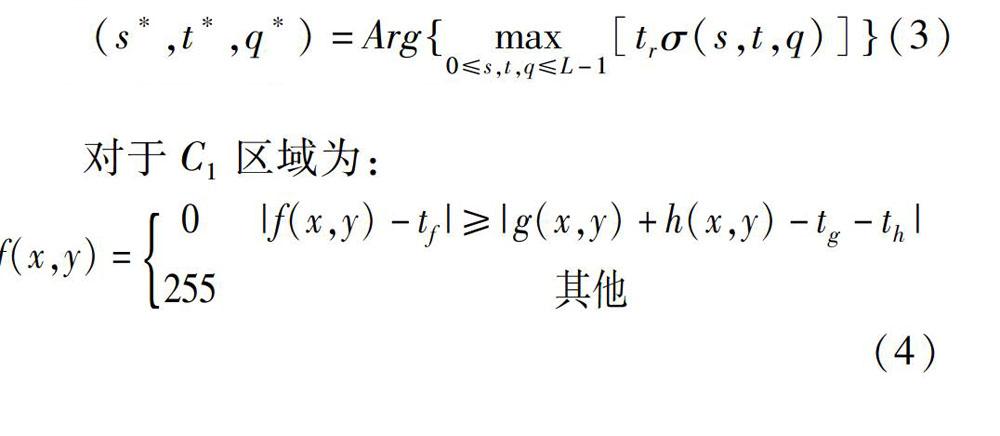
本文首先對三維Otsu法進行降維處理[21],分解為一個一維Otsu法和一個二維Otsu法,求得閾值tf和閾值對(tg,th),這三個閾值構成兩個平面將三維區域分割出目標和背景;進一步,采用基于粒子群優化的二維Otsu法求取閾值對(tg,th)。
步驟1:對三維Otsu閾值分割算法進行降維處理
將傳統三維Otsu定義的像素點(f(x,y),g(x,y),h(x,y))在定義域L×L×L的三維空間中進行區域投影,將像素點投影到平面f(x,y)=tf,和平面g(x,y)+h(x,y)=tg+th上,即將三維的Otsu閾值法分解為一個一維和一個改進的二維Otsu法,判斷點面之間距離來劃分屬于目標區域還是背景區域,如圖2。
二維閾值分割采用二維曲線閾值型Otsu方法,如圖3所示,曲線C=r(i,j)是一條經過(s,t)的曲線,曲線C將圖像分成A0和A1兩塊區域,A0和A1分別是圖像的目標與背景,兩區域的概率和有p0+p1=1。為了方便計算,選用直線L*代替曲線,直線L*垂直于定義域對角線,經過最佳閾值點(s*,t*)。在對圖像每個像素點遍歷求最佳閾值(s*,t*)過程中根據特殊直線分割的幾何性質可以只需遍歷二維直方圖的主對角線和一條次主對角線。
設二元組(i,j)出現的聯合概率密度pij,其中,N為像素的總個數,有∑Ni=1∑Nj=1pi,j=1,假設過閾值點(s,t)的曲線C=r(i,j)將定義域分為兩個類型,分別為目標區域A0和背景區域A1,這兩區域有著不同的概率密度函數分布,這兩類出現的概率分別為:
使用粒子群算法(PSO)尋求最優閾值(s*,t*),在二維解空間中,每個粒子的位置為xi=(xi1,xi2),表示閾值(s,t),速度為vi=(vi1,vi2),表示粒子在二維解空間中位置移動的速度,對應的目標函數為公式(13)作為來評價該粒子優劣程度的適應度。
粒子位置從 (0,255)之間隨機產生,速度在(-vmax,vmax)之間隨機產生,設置最大迭代次數為Nmax,最大慣性因子為ωmax,最小慣性因子為ωmin,初始化q=0;計算該粒子類間的適應度,更新每個粒子的個體極值和整個粒子群的全局極值,其中,q表示迭代次數,個體極值ρBest和全局極值δBest是在直至q次迭代時刻,粒子i找到的最優閾值和整個粒子群所找到最優閾值;根據以下公式更新慣性因子:
3 實驗結果與分析
3.1 實驗材料
本研究的林木冠層圖像來源于涼水實驗林場,由帶有魚眼鏡頭的圖像采集設備獲得分辨率為3264X22448的原圖。中國黑龍江涼水國家級自然保護區(N47°10′50″, E128°53′20″)是東北林業大學進行實驗研究教學的重要基地,年平均氣溫-0.3℃,林木種類包括白樺次生林、闊葉紅松林等。
3.2 實驗結果與分析
通過實驗對比發現:使用本文方法分別對闊葉林和針葉林的森林冠層魚眼圖像的分割效果要比文[14]中的分解三維Otsu法更為有效。
同時,為進一步對比兩者方法對圖像分割的差異,闊葉林冠層魚眼分割圖像以圖5(a)為例,針葉林冠層魚眼分割圖像以圖5(b)為例,提取兩幅分割后圖像的局部圖像觀察,結果如圖7所示。圖7中圖(a)(b)(c)(d)分別是冠層圖(1)和(2)局部圖像位置示意圖中標出的四個方框內圖像放大效果圖,是提取分割結果圖的局部細節圖,細節圖主要選取樹枝部分和樹干部分觀察其分割效果,每組的三幅局部圖片分別是原圖、文[14]的分解三維Otsu法分割后局部圖片和本文方法分割后局部圖片。可以發現:相對于另外兩種分割算法,本文方法對于細節處理在分割效果上有較大提升。
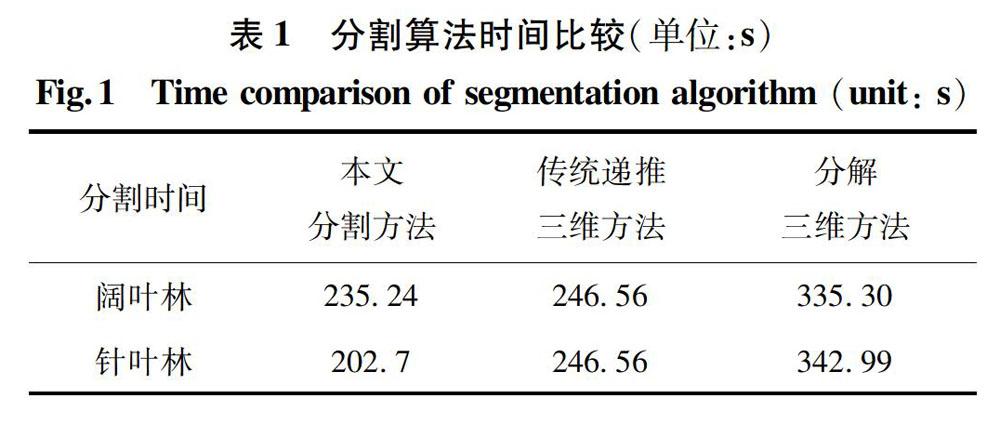
另外,為進一步驗證算法的分割效率,分別采用傳統遞推三維Otsu分割方法、分解三維Otsu分割方法以及本文方法對相同的冠層圖像進行分割實驗效率對比,分割算法時間是取十副不同的森林冠層圖像處理的平均結果數據。其中傳統遞推三維Otsu分割方法在遍歷每個像素的過程中采用了迭代遞推法,分解三維Otsu分割方法是將傳統三維分解為一維和二維Otsu分割法。分割效率比較結果如表1所示,可以看出:本文的分割算法對同一組森林冠層魚眼圖像的分割平均時間約為220s,比傳統遞推三維Otsu分割算法速度提高了約6%,比分解三維Otsu分割算法提高了約38%。
4 結 論
本文首先介紹了傳統三維Otsu方法,分析了傳統三維Otsu方法的不足,然后結合PSO算法對其進行改進。通過分解降維,得到一個一維度和一個兩維度,并采用PSO算法獲取二維最優閾值。實驗結果證明:所提改進方法能夠提取出森林冠層魚眼圖像的有效區域,且具有良好的分割效果和效率。本文的研究成果對于林木冠層參數的快速準確測量具有一定的參考價值。
參 考 文 獻:
[1] BRUSA A, BUNKER D E. Increasing the Precision of Canopy Closure Estimates from Hemispherical Photography: Blue Channel Analysis and Under-exposure [J]. Agricultural & Forest Meteorology, 2014, 195-196(6):102.
[2] LOFFREDO N, ONDA Y, HURTEVENT P, et al. Equation to Predict the 137 Cs Leaching Dynamic from Evergreen Canopies after a Radio-cesium Deposit[J]. Journal of Environmental Radioactivity, 2015, 147:100.
[3] 李德志, 臧潤國. 森林冠層結構與功能及其時空變化研究進展[J]. 世界林業研究, 2004, 17(3):12.
[4] 孫同高, 李麗冰, 張亨,等. 基于粗糙集的林木水分生理和冠層結構對凈光合速率的影響研究[J]. 生態環境學報, 2015(7):1137.
[5] 王希群,馬履一,賈忠奎,徐程揚.葉面積指數的研究和應用進展[J].生態學雜志,2005(5):537.
[6] 傅隆生, 孫世鵬, Vázquez-Arellano Manuel,等. 基于果萼圖像的獼猴桃果實夜間識別方法[J]. 農業工程學報, 2017, 33(2):199.
[7] POBLETEECHEVERRA C,OLMEDO G,INGRAM B,et al.Detection and Segmentation of Vine Canopy in Ultra-High Spatial Resolution RGB Imagery Obtained from Unmanned Aerial Vehicle (UAV): A Case Study in a Commercial Vineyard[J]. Impact Factor,2017,9(3):268.
[8] QURESHI W S, PAYNE A, WALSH K B, et al. Machine Vision for Counting Fruit on Mango Tree Canopies [J]. Precision Agriculture, 2016, 17(3):1.
[9] OTSU N. A Threshold Selection Method from Gray-level Histograms [J]. IEEE Transactions on systems, man, and cybernetics, 1979, 9(1): 62.
[10]劉健莊, 栗文青. 灰度圖象的二維Otsu自動閾值分割法[J]. 自動化學報, 1993, 19(1):101.
[11]景曉軍, 李劍峰, 劉郁林. 一種基于三維最大類間方差的圖像分割算法[J]. 電子學報, 2003, 31(9):1281-1285.
[12]GUO W Y, WANG X F, XIA X Z. Two-dimensional Otsu′s Thresholding Segmentation Method B ased on Grid Box Filter [J]. Optik-International Journal for Light and Electron Optics, 2014, 125(18):5234.
[13]范朝冬, 張英杰, 歐陽紅林,等. 基于改進斜分Otsu法的回轉窯火焰圖像分割[J]. 自動化學報, 2014, 40(11):2480.
[14]QIAO N, SUN P. Study of Improved Otsu Algorithm and Its Ration Evaluation Analysis for PCB Photoelectric Image Segmentation [J]. Optik-International Journal for Light and Electron Optics, 2014, 125(17): 4784.
[15]GUO W Y, WANG X F, XIA X Z. Two-dimensional Otsu′s Thresholding Segmentation Method Based on Grid Box Filter[J]. Optik International Journal for Light and Electron Optics, 2014, 125(18):5234.
[16]KENNEDY J, EBERHART R. Particle Swarm Optimization[M]. Springer US, 2011.
[17]MASDARI M, SALEHI F, JALALI M, et al. A Survey of PSO-Based Scheduling Algorithms in Cloud Computing[J]. Journal of Network & Systems Management, 2017, 25(1):122.
[18]CHEN S M, JIAN W S. Fuzzy Forecasting Based on Two-factors Second-order Fuzzy-trend Logical Relationship Groups, Similarity Measures and PSO Techniques[J]. Information Sciences, 2016(391/392):65.
[19]GUEDRIA N B. Improved Accelerated PSO Algorithm for Mechanical Engineering Optimization Problems[J]. Applied Soft Computing, 2016, 40(40):455.
[20]SYAHPUTRA R, SOESANTI I. Power System Stabilizer Model Based on Fuzzy-PSO for Improving Power System Stability[C]// International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation, IEEE, 2016:121.
[21]徐青, 范九倫. 新的基于分解直方圖的三維Otsu分割算法[J]. 傳感器與微系統, 2017, 36(1):119.
(編輯:溫澤宇)
