電力機車定速模式的半實物仿真研究與實現
2019-01-15 12:18:52王龍剛鄭慧麗
現代工業經濟和信息化 2018年17期
關鍵詞:模型
王 清,王龍剛,鄭慧麗
(中國中車永濟電機公司,陜西 西安 710016)
引言
電力機車牽引控制系統軟硬件設計完成后,為了保證實際裝置及軟件程序的可行性和可靠性,通過半實物仿真試驗驗證是必不可少的。在牽引控制系統設計中,考慮司機駕駛方便和機車牽引力的有效利用,設計一種定速模式可以很好地解決此類問題。當司機按下定速模式按鈕后,機車自動保持當前速度而不需要人為操作。采用這種模式,當長時間行車后,司機不用再去控制手柄,減輕了疲勞,同時減少了不必要的車速變化,提高了牽引力的利用率。為了檢驗定速模式的控制效果,搭建了半實物仿真平臺進行實時仿真驗證。
近年來,數字仿真技術以其經濟性、可控性、安全性等特點得到了廣泛應用[1]。然而遺憾的是,它卻沒有與硬件I/O的接口,不支持實時仿真。針對該軟件的不足,進行實時仿真就成為了解決該問題的突破口。
半實物仿真就是通過工程仿真或者是對實物在回路的實時系統建立動態模型,使得工程系統的設計過程變得更加簡單[2]。它的可測試性使得開發者能夠把計算機使用到任何需要應用的地方;其應用的靈活性使它能夠應用于解決最復雜的仿真和控制問題,目前,它已經成功應用于硬件在回路實時仿真測試或者快速原型的開發、控制與測試領域。
本文利搭建的半實物仿真平臺實現了電力機車定速模式的試驗驗證。該平臺由控制上位機、兩臺TCU及三臺仿真機組成,模擬電力機車整車運行過程。
1 半實物仿真硬件平臺搭建
在半實物仿真測試系統中,牽引控制單元(TCU)為真實設備,搭建整車被控對象主電路模型和機車動力學模型運行在仿真機中。半實物仿真硬件平臺主要包括:3臺上位機、3臺仿真機和2臺牽引控制單元(TCU)。其中仿真機1和2的作用為模擬牽引控制單元的控制對象,在本文中主要由弓網模型、兩個整流和三個逆變電機的主電路模型;仿真機3為動力學仿真機,主要模擬機車動力學運動關系。TCU中內嵌控制程序,主要作用是對被控對象進行控制。圖1為半實物仿真硬件平臺框圖。
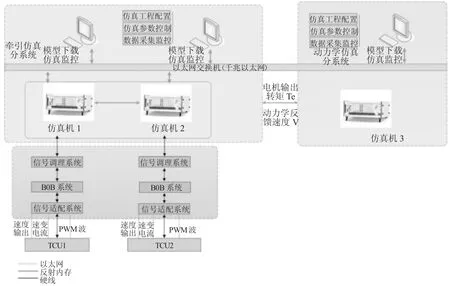
圖1 半實物仿真硬件平臺框圖
本文搭建半實物仿真平臺實現電力機車定速模式的測試。硬件平臺實現的過程為:仿真中1和2運行電力機車兩個整流和三個逆變和電機模型,模擬整車電傳動系統;兩個TCU分別控制仿真機1和2中的主電路模型。試驗開始時,TCU1和TCU2通過硬線I/O發送PWM波,使主電路電機運行起來,電機輸出轉矩通過反射內存信號傳送給仿真機3中的動力學模型中,動力學模擬機車運行實時輸出電機的轉速和機車的速度,再通過反射內存反饋速度給仿真機1和2,實現速度的閉環。在此過程中,通過動力學模型實時調節機車的負載,并輸出不同的速度給TCU進行速度定速調節。
2 軟件流程分析
圖2給出了測試過程中的具體操作流程。具體過程如下:
1)開始階段,機車工作選擇在定速模式下;
2)定速速度為v;
3)TCU從動力學模型中實時獲取機車實際定速速度為V,判定V與v差值在±1 km/h范圍內;
4)由動力學輸出不同的牽引力或制動力;
5)隨著負載的變化,TCU控制機車調整牽引力/電制力;
6)在負載變化的過程中,TCU始終實時獲取機車實際速度V判定,V與v差值在±1 km/h范圍內;
7)結束。
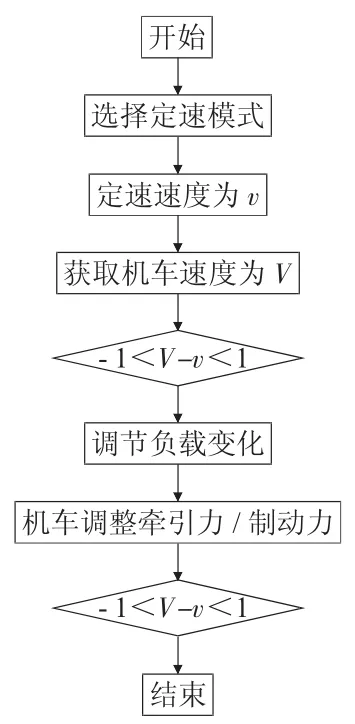
圖2 測試操作流程圖
3 試驗結果分析
分別選擇定速50 km/h和90 km/h兩個定速點按照上圖軟件流程依次試驗。定速50 km/h和90 km/h試驗結果見圖3和圖4。
3 468 s時電力機車實施定速50 km/h,由半實物平臺動力學模型依次提供機車反方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的電制力,3 496 s時動力學輸出制動力為0。動力學依次提供與機車同方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的牽引力,3 909 s時動力學輸出牽引力為0。從試驗結果可見,隨著負載的變化,機車調整牽引力/電制力。當動力學輸出轉變為牽引10%的過程中,初始階段機車尚未轉變為電制動,列車速度迅速增加,最高瞬時達到50.6 km/h,此時被試機車電制功率增加,列車速度開始迅速降低。在負載變化的整個過程中,列車速度始終控制在50±1 km/h 范圍內,試驗結果滿足預期設計要求。

圖3 定速50 km/h測試波形

圖4 定速90 km/h測試波形
707 s時電力機車實施定速50 km/h,由半實物平臺動力學模型依次提供機車反方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的電制力,969 s時動力學輸出制動力為0。動力學依次提供與機車同方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的牽引力,1 162 s時動力學輸出牽引力為0。從試驗結果可見,隨著負載的變化,被試機車調整牽引力/電制力;當陪試機車電制50%時,列車速度瞬時降低到89 km/h,被試機車的牽引力迅速增加,列車速度增加到89.5 km/h。在負載變化的整個過程中,列車速度始終控制在(50±1)km/h范圍內,試驗結果滿足預期設計要求。
4 結語
本文所搭建的電力機車半實物仿真模型,以及所設計的定速控制算法在半實物仿真平臺和牽引控制單元(TCU)中能正確運行。實驗結果表明,定速模式能夠在全速度范圍內按照預期的程序算法設定的目標實現。驗證了TCU程序中設計的定速算法的正確性。為后續系統在現場試驗起到關鍵的指導作用,同時縮短及降低了試驗周期和成本。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
